本文主要是介绍纠正对CAN的错误认识,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
STM32CUBEMX系列——CAN通讯的配置_stm32cubemx 配置103 can-CSDN博客
STM32之CAN通信_stm32 can通信-CSDN博客
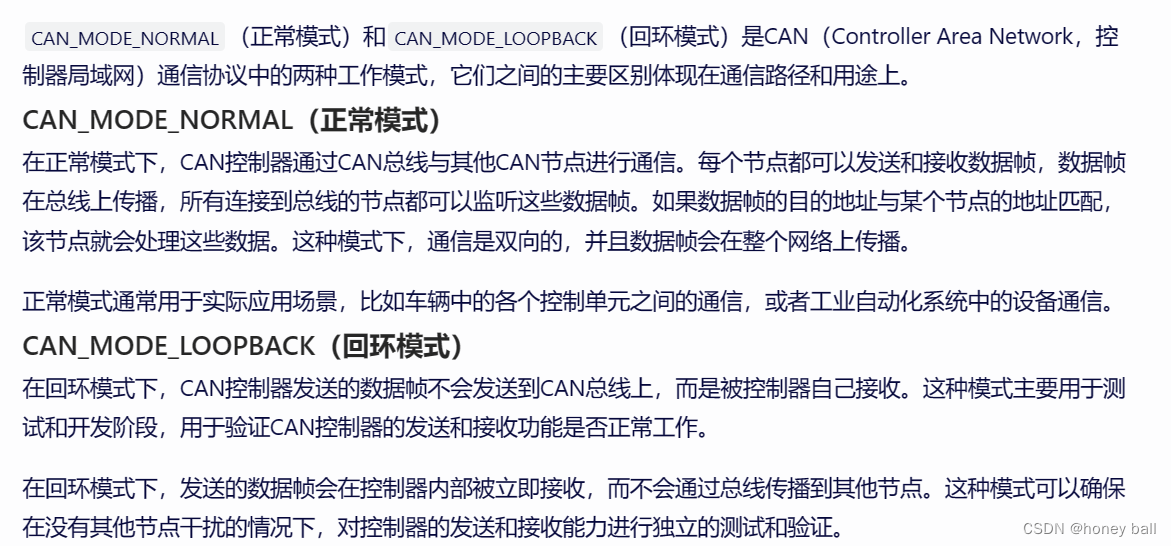
在回环模式下,发送的数据帧会在控制器内部被立即接收,而不会通过总线传播到其他节点。这种模式可以确保在没有其他节点干扰的情况下,对控制器的发送和接收能力进行独立的测试和验证。

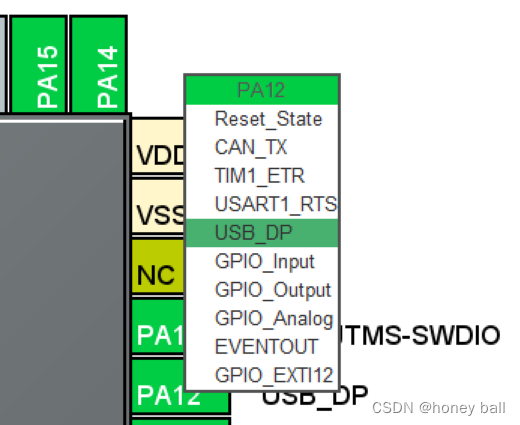
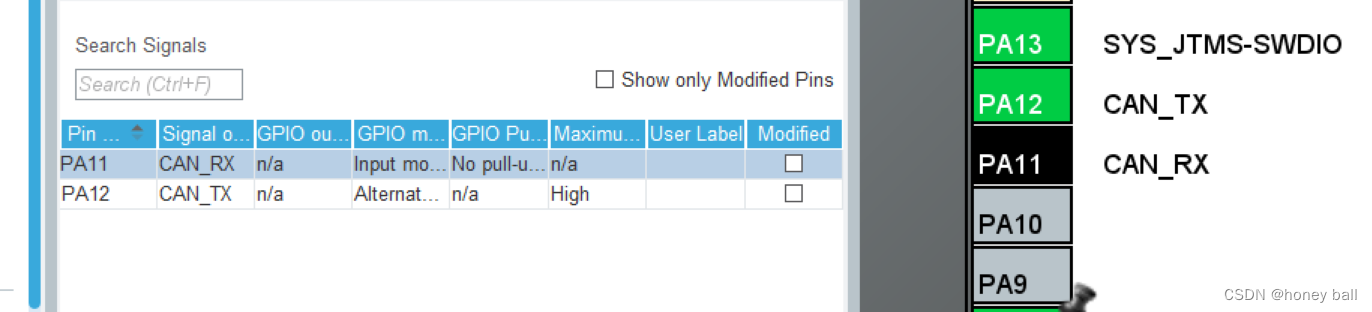
CAN的引脚配置中TX配置为上拉模式,RX配置为输入模式。
CAN的最大传输速率可以达到1Mbps。
需要在CAN总线的两端都加上120欧姆电阻用于吸收反射。
没有所谓的用一个CAN芯片就可以直接接到单片机的Usart的串口上,单片机的串口必须也应该配置为CAN模式!有这种错误认知是对CAN代码层面的理解不够深入。


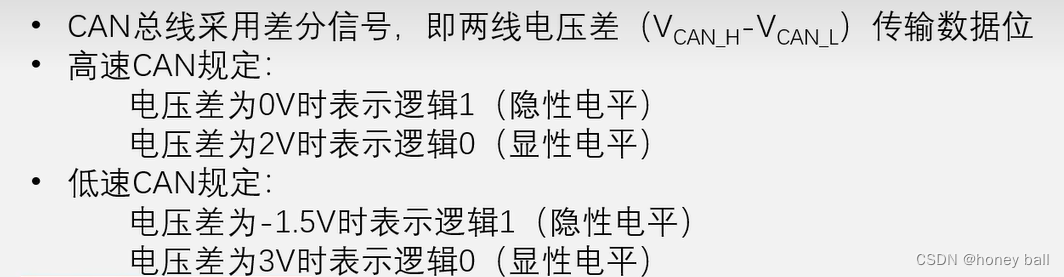
单片机的IO引脚的电平电压显然没有这么大,因此需要CAN收发芯片做一下升压:
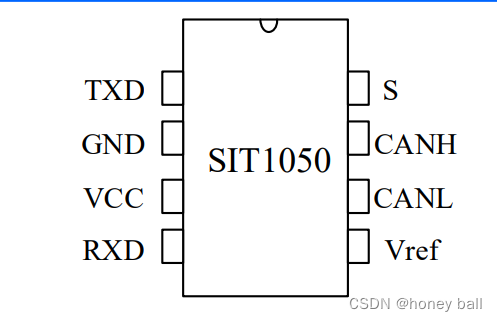

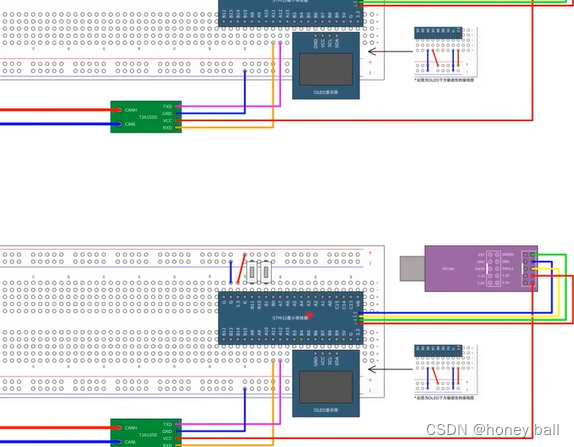
设计板子的时候CAN_RX接到CAN收发芯片的RX,这里没必要做交叉:
每个CAN收发芯片的CAN_H和CAN_L都并联挂载到总线上即可。

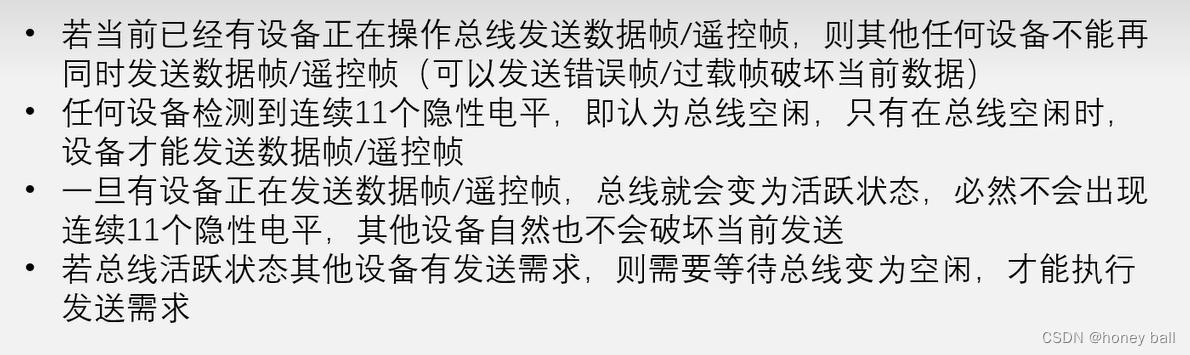
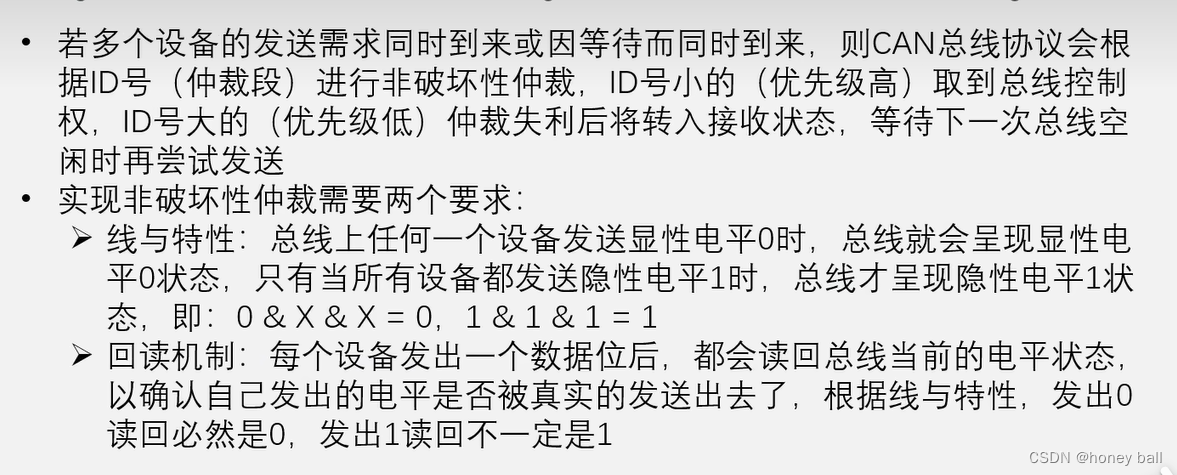
先占先得:

这篇关于纠正对CAN的错误认识的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!

![[VS2008]解决“由于应用程序的配置不正确,应用程序未能启动,重新安装应用程序可能会纠正这个问题”](/front/images/it_default.gif)

![纠正从小的认识错误[关于闰年的判断]](/front/images/it_default2.jpg)