本文主要是介绍Games101 光栅化笔记, 作业二,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
光栅化笔记
1、屏幕、像素、屏幕空间:
(1)屏幕:
1、像素的二维数组
2、分辨率:数组的规模
3、典型的光栅成像设备
(2)像素的抽象理解:
1、内部颜色不会变化的小方块
2、RGB三者的颜色混合
(3)对光栅化的理解:对像素进行着色
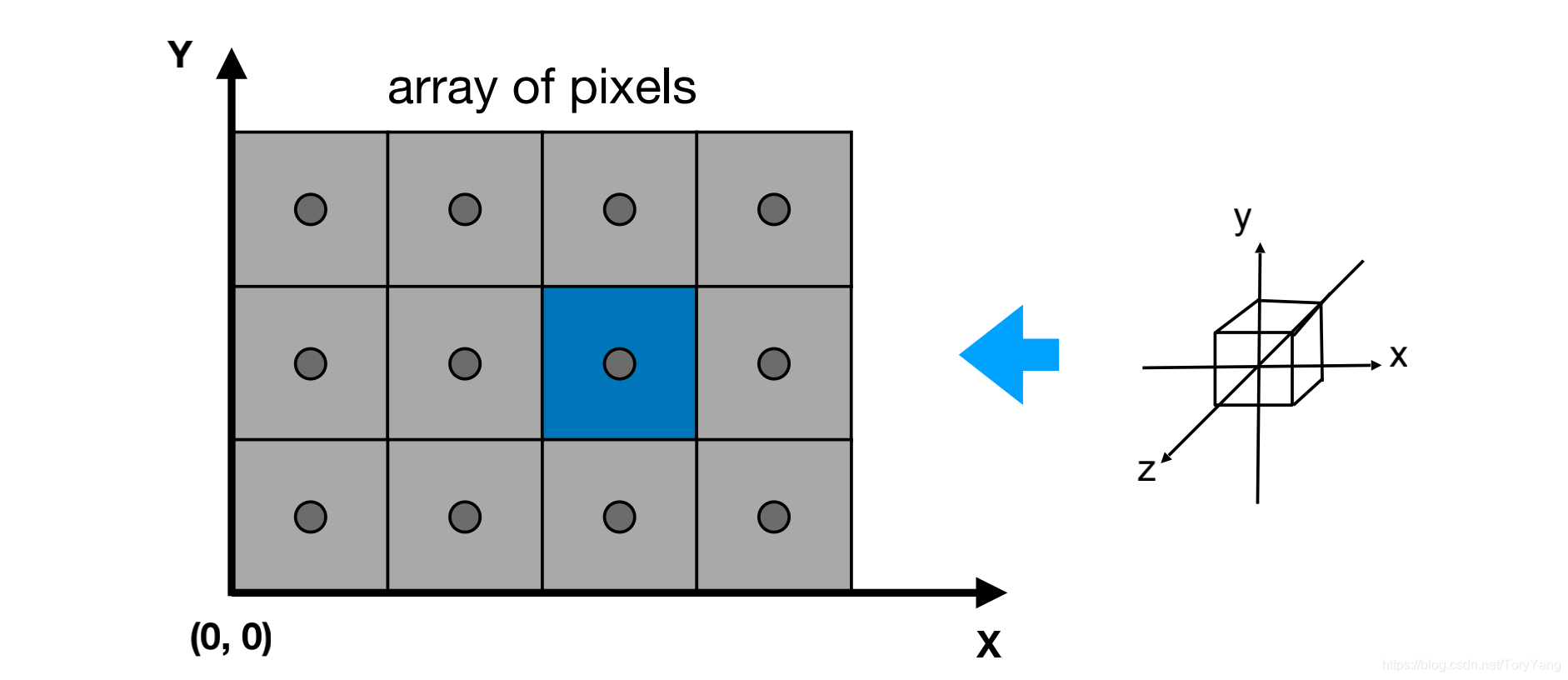
(4)屏幕空间(在闫老师课上的规定):
1、屏幕的左下角是原点
2、x和y坐标都取整数,下图中蓝色像素坐标为(2,1)
3、像素的索引范围是(0,0)-> (width-1,height-1)
4、(x,y)为像素坐标,则像素中心坐标为(x+0.5,y+0.5)
5、屏幕覆盖范围从(0,0) -> (width,height)
6、视口变换:
投影变换后的(-1,1)正方体向(0,width)×(0,height)屏幕区域的变换,忽略Z方向的改变
2、将三角形打散成像素——采样
(1)为什么是三角形?
三角形是最基础的多边形;任何多边形多可以拆成三角形;三点一定在同一平面内;三角形的内外定义清晰;对三角形的三个点定义属性,内部的任一点属性都可计算渐变(三角形内部插值)
(2)判断像素和三角形的位置关系
对三角形采样就是判断像素中心是否位于三角形内,如果中心点在三角形外,则一定位于三角形三条边的同一侧,反之不成立。
方向判断用叉乘
P1Q×P1P2 < 0,说明P1Q位于P1P2左侧,同理可判断Q位于P0P1左侧,以及P2P0的左侧。

边缘条件的判断(比如像素中心位于边上) : 要不不作处理,要么特殊处理,在闫老师的课上不作处理。
(3)采样的加速方法:
1、boundingBox(包围盒):通过三角形的三点坐标计算得出,不用遍历整个屏幕!

2、每一行只考虑最左和最右,多余一个元素都不计算

(4)抗锯齿:
发生锯齿的原因:采样率对于信号来讲不够高,产生信号走样
3、走样与反走样
从信号角度理解采样:采样就是重复原始信号的频谱
从信号角度理解走样:
走样的原因即采样率对于信号来讲不够高(信号变化速度快),导致图像的频谱出现交叉现象,结果就是导致锯齿。

(1)反走样的技术——增加采样率
属于物理手段。
如增加分辨率,像素和像素之间间隔小,采样率更高,频谱间隔大
(2)反走样的技术——滤波
如模糊滤波:先模糊后采样(顺序不能颠倒!),本质是降低信号的频率(减少高频);
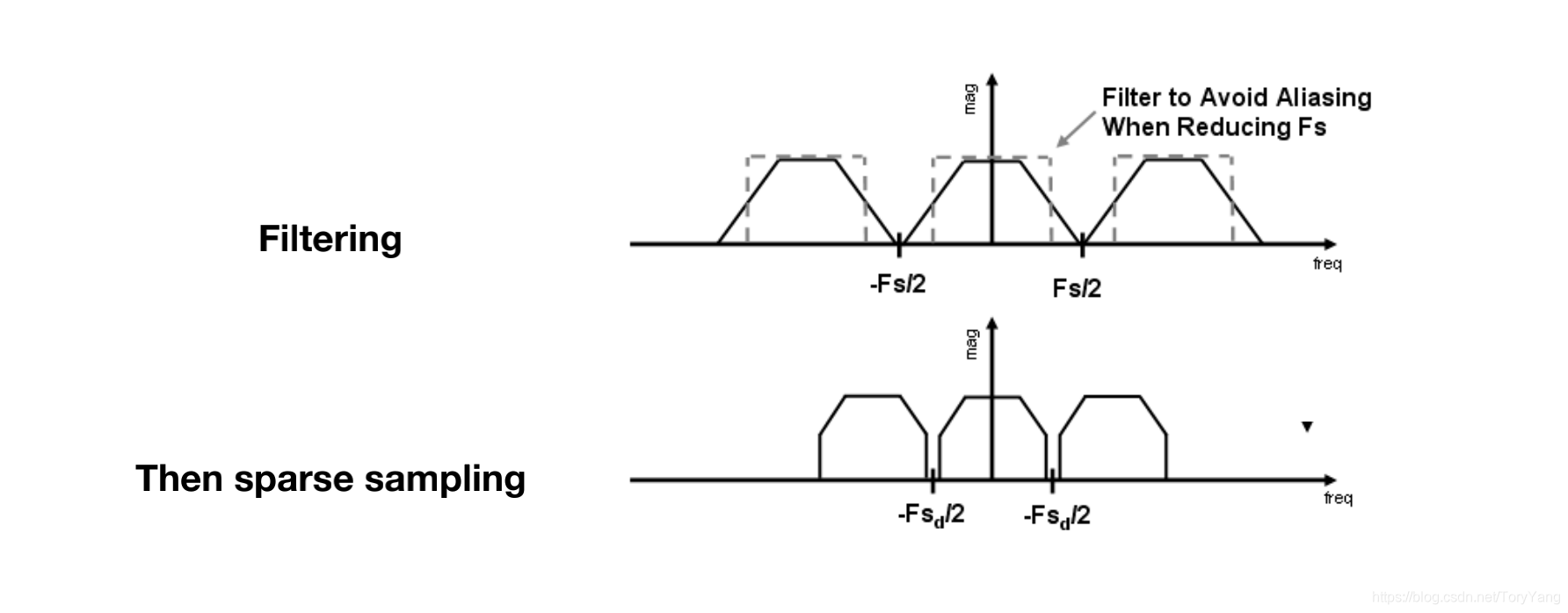
步骤
1、卷积,可看成是和周围的信号取平均 2、采样

(3)反走样的技术——超采样(Supersampling, MSAA)
将一个像素内分成更多的小部分,再分别判断是否位于三角形内,再卷积采样。
本质是对模糊处理的提升。
代价:提高计算量。
(4)FXAA与TAA
FXAA:快速近似抗锯齿,属于图像的后期处理,找到边界并替换
TAA:复用上一帧的结果抗锯齿
(5)DLSS
当小图拉大时会发生因采样率不够而细节缺失的现象,DLSS使用深度学习的方法”猜“出图像。
4、可见性(遮挡)问题——深度缓存(Z-buffering)
(1)画家算法:
即所有物体,计算深度(O( n l o g n nlogn nlogn)),按照深度顺序,从远到近依次渲染。
但深度的定义是个问题,而且有些物体之间不好明确深度关系,如下图:
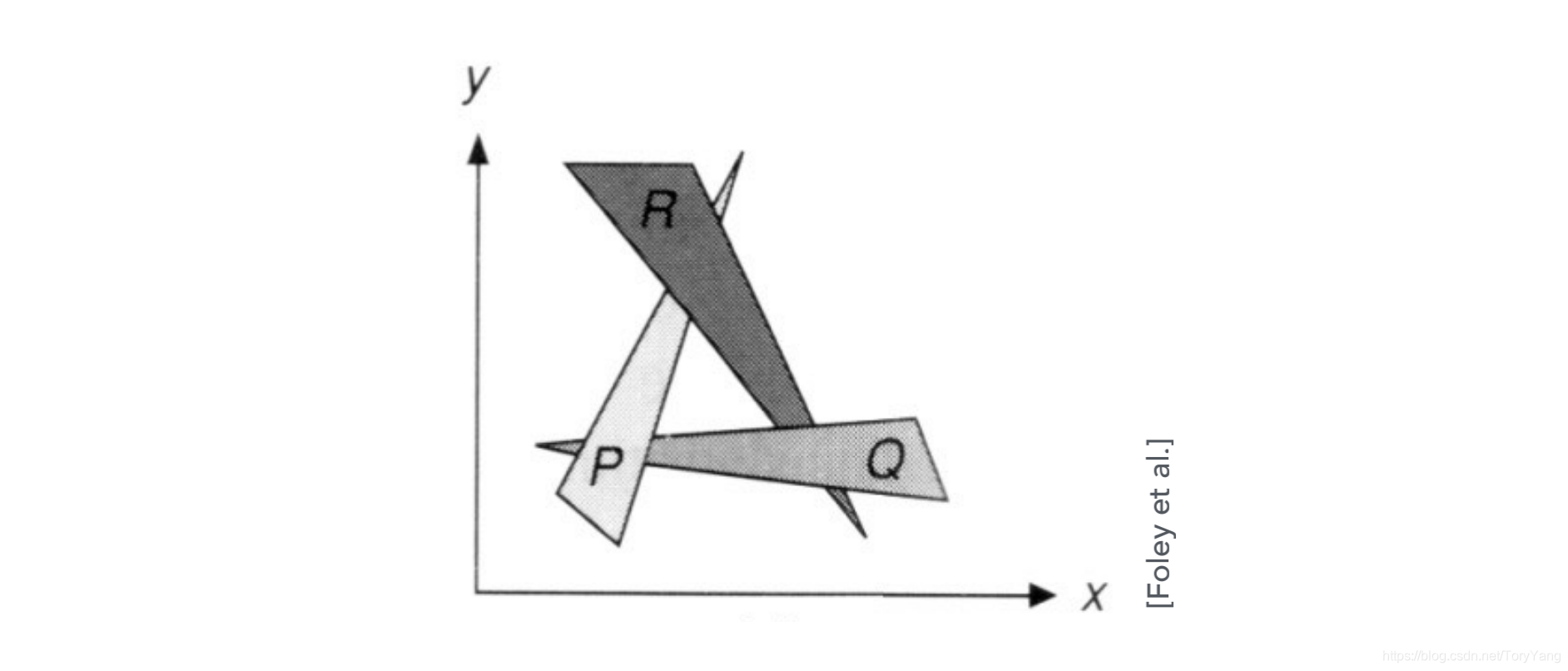
因此在图形学中不能使用画家算法。
(2)深度缓存(Z-buffer):
1、思想:画家算法是对每个物体深度进行排序,而z-buffer则是对每个像素的深度进行排序,将排序结果存储在深度缓存(depth buffer)中,根据深度缓存对进行光栅化。
在Games101课程中,规定越远z越大,越近z越小(与之前规定的z意义不同)。
2、如何计算得到像素深度?

特点:与扫描三角形的顺序无关(假设不会有两个三角形在同一个像素拥有相同的深度,实际也类似,因为浮点数难以判等)。另外在MSAA中,一个像素被分成多个采样点,则是分别对每个采样点进行判断。
作业二
作业2要求实现三角形光栅化的流程:
(1)计算boundingBox
(2)遍历boundingBox包围的点,并判断是否在三角形内
(3)如果点在三角形内,得到点的深度(插值方法已给出),与深度缓存中的相比较,如果小于,则更新深度缓存,并在屏幕上显示该点
代码:
1、计算boundingBox:
int x_l = std::floor(std::min(v[0][0], std::min(v[1][0], v[2][0])));
int x_r = std::ceil(std::max(v[0][0], std::max(v[1][0], v[2][0])));
int y_b = std::floor(std::min(v[0][1], std::min(v[1][1], v[2][1])));
int y_t = std::ceil(std::max(v[0][1], std::max(v[1][1], v[2][1])));
2、判断点是否位于三角形内:
static bool insideTriangle(int x, int y, const Vector3f* _v)
{ //如果一个点P在三角形ABC内部,即AB*AP,BC*AP,CA*AP,叉乘符号均相同。Vector2f point(x, y);Vector2f AB = _v[1].head(2) - _v[0].head(2);Vector2f BC = _v[2].head(2) - _v[1].head(2);Vector2f CA = _v[0].head(2) - _v[2].head(2);Vector2f AP = point - _v[0].head(2);Vector2f BP = point - _v[1].head(2);Vector2f CP = point - _v[2].head(2);return AB[0] * AP[1] - AB[1] * AP[0] > 0&& BC[0] * BP[1] - BC[1] * BP[0] > 0&& CA[0] * CP[1] - CA[1] * CP[0] > 0;}
3、遍历boundingBox,如果点位于三角形内:
//(2)遍历bounding boxfor(int x = x_l ; x <= x_r ; x++)for(int y = y_b ; y <= y_t ; y++) {if(insideTriangle(x + 0.5, y + 0.5, t.v)) { //判断像素中心是否位于三角形内//获取该点的深度,插值计算方法已封装好auto[alpha, beta, gamma] = computeBarycentric2D((float)x + 0.5f, (float)y + 0.5f, t.v);float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();z_interpolated *= w_reciprocal;//将深度与深度缓存中的相比较,如果小于则更新深度缓存并在屏幕上画出if (depth_buf[get_index(x, y)] > z_interpolated) {Vector3f color = t.getColor();Vector3f point(3);point << (float)x, (float)y, z_interpolated;depth_buf[get_index(x, y)] = z_interpolated;set_pixel(point, color);}}}这篇关于Games101 光栅化笔记, 作业二的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







