本文主要是介绍从51到ARM裸机开发实验(009)LPC2138 中断实验,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、场景设计
中断的概念在《从51到ARM裸机开发实验(007) AT89C51 中断实验》中已经介绍过,LPC2138的Keil工程创建在《从51到ARM裸机开发实验(005)LPC2138 GPIO实验》中已经介绍过。本次使用LPC2138来实现一个这样的场景:四个LED依次亮灭,时间间隔最小0.1秒,最大1秒,要求精确延时。使用两个按键分别控制间隔时间的增减,每按一次增或减0.1秒。精确延时用定时器中断实现,按键响应使用外部中断实现。(Protues仿真的时间和现实时间差距较大,可以注意Protues左下方的仿真时间或者接示波器观察曲线变化时间间隔)。
二、LPC2138时钟系统
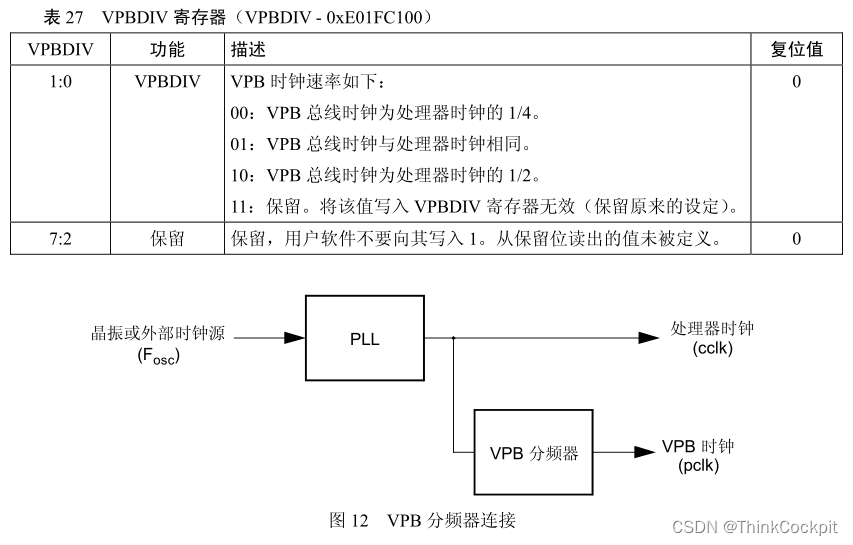
从芯片手册可以看到,PCLK时钟(记住这个时钟,它是定时器发挥作用的前置条件)是由CCLK时钟经过分频而来,分频多少由寄存器VPBDIV决定。PCLK可以等CCLK或1/2CCLK或1/4CCLK。那么CCLK又是怎么来的呢?它是晶振或外部时钟源经PLL锁相环配置而来。

关于寄存器更详细的解释见文末附件中的芯片数据手册。
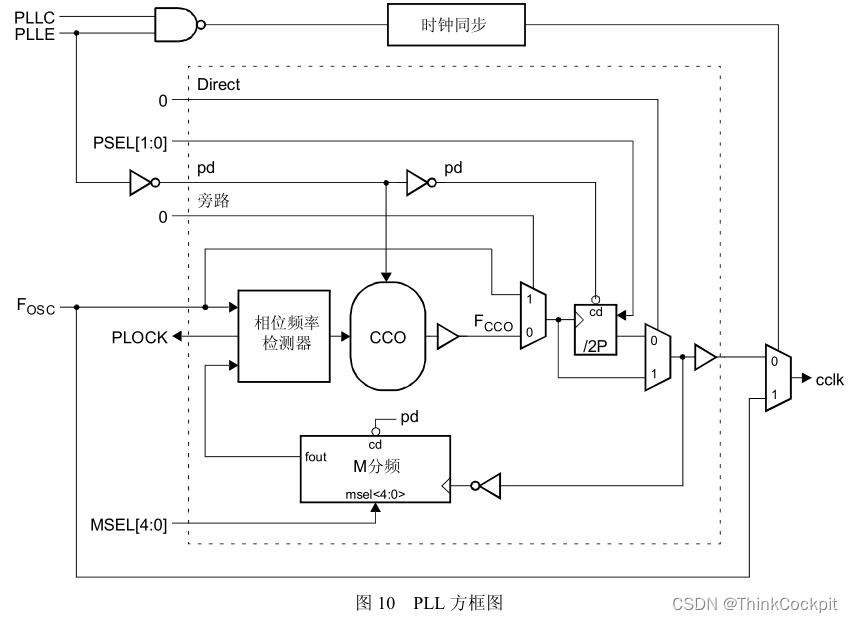
本实验中的采用的晶振频率为10MHz,将系统配置为 Fosc = 10MHz , CCLK= 60MHz 。根据芯片手册的描述计算如下:
M=cclk/Fosc = 60MHz/10MHz = 6 。因此, M-1 = 5 写入 PLLCFG4:0 。
P 值可由 P=Fcco/(cclk*2) 得出, Fcco 必须在 156MHz~320MHz 内。假设 Fcco 取最低频率 156MHz ,则P=156MHz/(2*60MHz) = 1.3 。 Fcco 取最高频率可得出 P=2.67 。因此,同时满足 Fcco 最低和最高频率要求的 P 值只能为 2 。所以, PLLCFG=6:5=1 。
接下来配置VPBDIV,本实验中将PCLK配置为CCLK的1/4,即15MHz。
三、LPC2138中断系统
本实验中使用EINT0和EINT1两个中断。

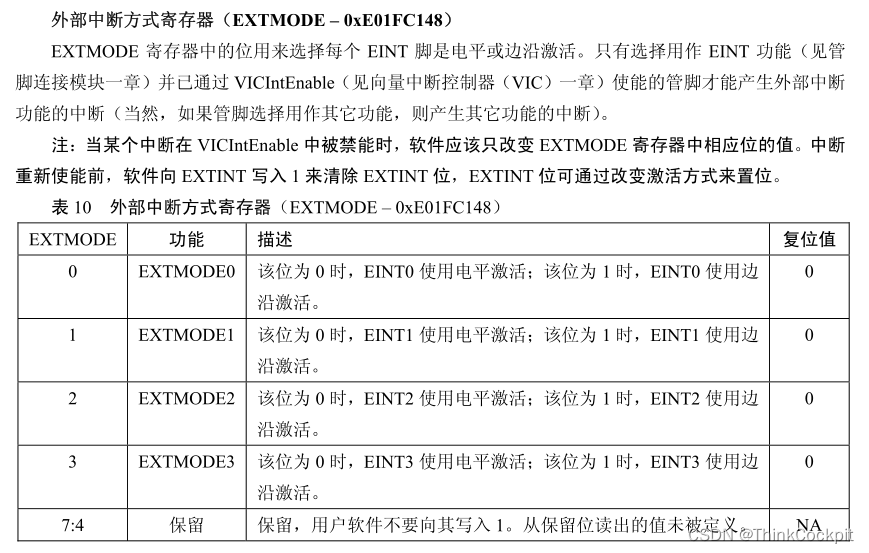
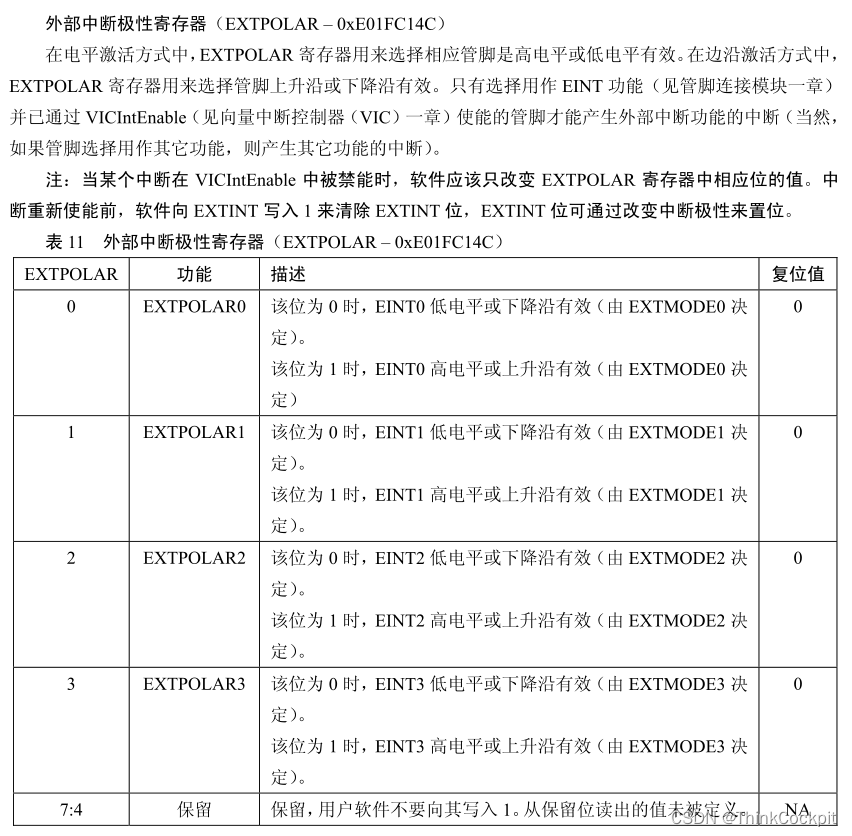
通过以下两个寄存器配置中断的触发方式:
重点内容:LPC2138不支持中断嵌套。LPC2138为ARM7TDMI内核。是一种ARM处理器架构,具体来说是ARMv4T微架构。在这种处理器中,如果当前处于一个高优先级中断处理程序中,而此时又发生了一个同级别或更低优先级的中断,那么处理器将不会立即进入这个新的中断处理程序,即不支持中断嵌套。这意味着如果一个中断服务程序(ISR)正在执行,并且在该ISR完成之前又发生了一个中断,这第二个中断将被忽略,直至当前的ISR执行完毕。
问题解决方法:① 优化中断处理程序:确保每个中断处理程序尽可能短小精悍,以减少中断处理时间,从而减少对中断嵌套的需求。② 使用轮询方式:如果确实需要在一个中断处理程序执行期间处理另一个中断,可以在ISR中设置一个标志,然后在ISR返回前将控制权交还给处理器,然后在主循环中或者一个低优先级中断中处理这个标志。③ 优先级重新配置:在系统设计中,可以为某些中断设置高的优先级,以确保在处理低优先级中断时不会被高优先级中断打断。④ 使用专用的嵌套向量中断控制器(NVIC):如果硬件和ARM核支持中断嵌套,可以配置NVIC来允许中断嵌套。
在实际应用中,通常会根据实际需求和系统资源,选择最合适的解决方案。如果系统对中断响应有严格的实时要求,且对中断处理时间有严格控制,那么可能需要重新评估系统设计,避免不必要的中断嵌套,或采取措施减少每个中断的处理时间。
LPC2138的中断实现方式:
①、通过VICVectAddrX指定某中断(此时还不知道是哪个中断)发生时的执行函数。
②、通过VICVectCntlX控制寄存器,启用编号为X的中断,并将某VIC通道的中断(指定哪个VIC通道号就是哪个中断)和X中断进行关联。
③、通过VICIntEnable配置启用某中断(VICIntEnable中的位和X存在对应关系)。

四、仿真电路
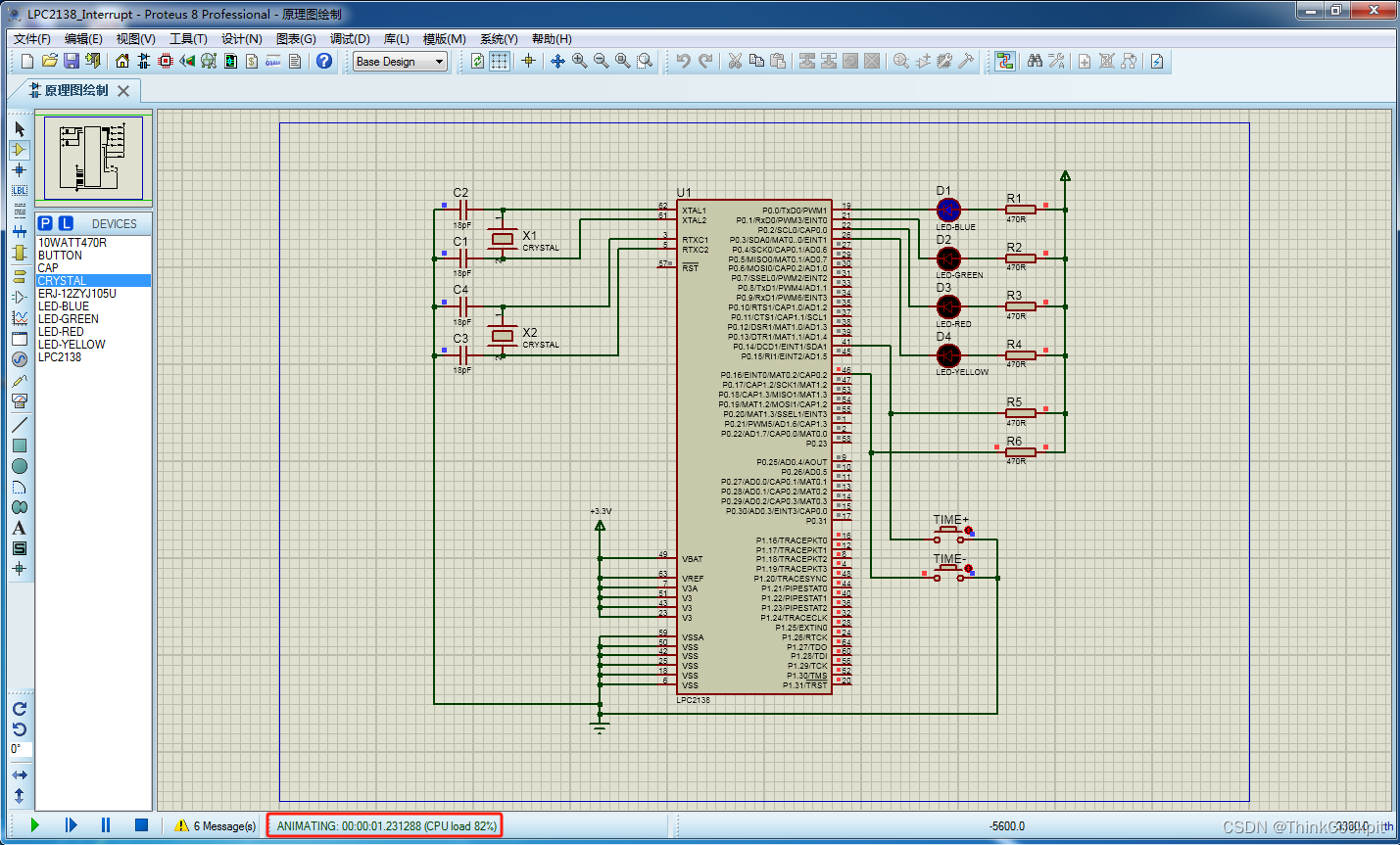
注意仿真时间线和现实时间并不一致,比如现实中可能过去三五秒了,仿真时间才过去1秒。仿真时间线注意仿真软件左下角即可。比如本实验中最长延时LED 1秒切换一次,是指Protues的仿真时间线过去1秒才会切换,与现实时间无关。
五、程序设计
1、驱动程序
interrupt.h
#ifndef _INTERRUPT_H_
#define _INTERRUPT_H_
#include "lpc2138.h"void set_interrupt_callback(int interrupt_num, void* isr_callback);
void init_timer0_isr();
void init_external_isr();
#endif
lpc2138.h 里面主要是寄存器到内存地址的映射配置,也可以不使用此文件,自己根据芯片手册配置寄存器。
interrupt.c
#include "interrupt.h"
#include "delay.h"void (*callback0)(); // 声明一个指向同样参数、返回值的函数指针类型
void (*callback1)(); // 声明一个指向同样参数、返回值的函数指针类型
void (*callback2)(); // 声明一个指向同样参数、返回值的函数指针类型//设置中断回调函数
void set_interrupt_callback(int interrupt_num, void* isr_callback){if(interrupt_num == 0){callback0 = isr_callback;}else if(interrupt_num == 1){callback1 = isr_callback;}else if(interrupt_num == 2){callback2 = isr_callback;}
}//定时器0中断事件处理
void timer0_isr(void) __irq {//清除中断T0IR = (1<<0);//中断应答VICVectAddr = 0;callback2();
}//cclk = 60MHz
void initPLL() {// 设置 PLL0CFG 寄存器,选择合适的 M 和 P 值PLLCFG |= ((1 << 5) |(1 << 2) | (1 << 0));// 启动 PLLPLLCON |= 0x01;// 等待 PLL 锁定while (!(PLLSTAT & (1 << 10)));// 选择 PLL 为系统时钟源PLLCON |= (1 << 1);PLLFEED = 0xAA;PLLFEED = 0x55;// 等待 PLL 切换完成while (!(PLLSTAT & (1 << 9)));
}//pclk = 15MHz
void initVPBdivider() {// 设置 VPBDIV 寄存器,选择 VPB 时钟分频比VPBDIV &= ~(0x03);
}//定时器中断初始化
void init_timer0_isr(){initPLL();initVPBdivider();// 定时器模式:每上升一次PCLK边T0CTCR = 0x00;// 预刻度寄存器:15 MHz PCLK, 15000-1得到毫秒T0PR = 14999;// 匹配寄存器:计时100毫秒即0.1秒T0MR0 = 100;// 每经过T0PR+1个PCLK周期,T0TC值增加1T0TC = 0;// 在MR0上中断和复位(T0TC值 = T0MR0值时触发中断和复位)T0MCR = (1<<0) | (1<<1);// 定时器0 ISR地址VICVectAddr3 = (unsigned long)timer0_isr;// 启用定时器0中断,使用槽位4VICVectCntl3 = (1<<5) | 4;// 在VIC中使能定时器0中断VICIntEnable = (1<<4);// 启动计时器0T0TCR = 0x01;
}// 定义外部中断处理函数0
void external_interrupt_handler0(void) __irq {delayms(10);EXTINT = 1 << 0; // 清除外部中断0的中断标志位VICVectAddr = 0;callback0();
}// 定义外部中断处理函数1
void external_interrupt_handler1(void) __irq {delayms(10);EXTINT = 1 << 1; // 清除外部中断1的中断标志位VICVectAddr = 0;callback1();
}//按键中断初始化
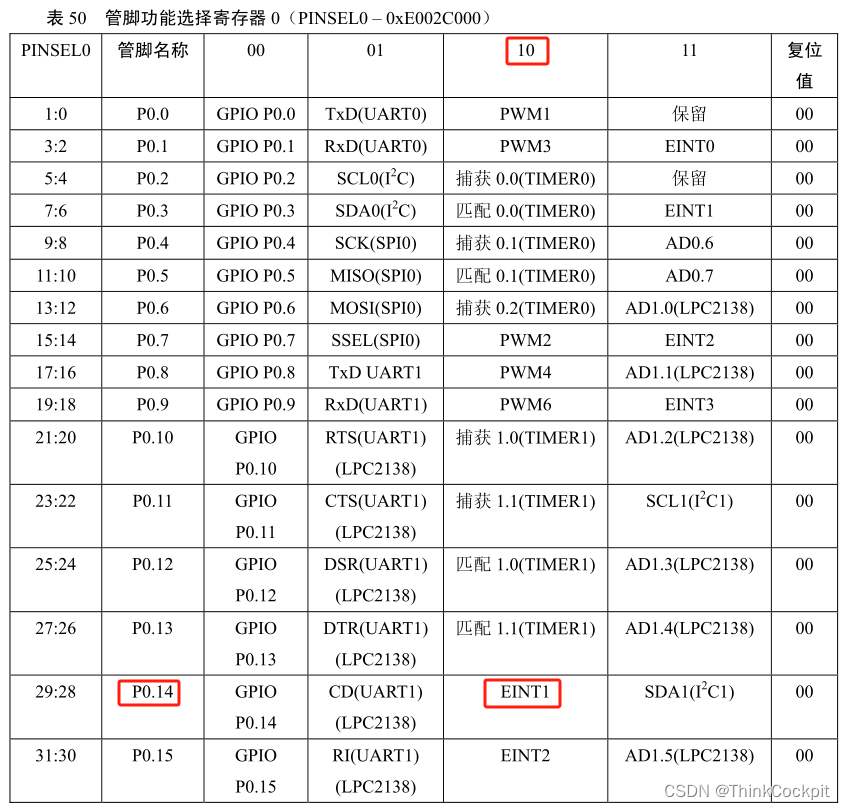
void init_external_isr(){// 配置外部中断引脚// 配置P0.14为ENIT1PINSEL0 |= (1 << 29); //第29位配置为1PINSEL0 &= ~(0x01<<28); //第28位配置为0// 配置P0.16为ENIT0PINSEL1 |= (1 << 0); //第0位配置为1PINSEL1 &= ~(0x01<<1); //第1位配置为0IODIR0 &= ~(1<<16);// 配置外部中断触发方式EXTMODE |= (1 << 0) | (1 << 1); // 设置外部中断0和1为边沿触发模式EXTPOLAR |= (1 << 0) | (1 << 1); // 设置外部中断0和1为上升沿触发// 启用外部中断中断VICVectAddr0 = (unsigned)external_interrupt_handler0; // 设置中断处理函数0VICVectCntl0 |= (1 << 5) | 0x0E; // 设置为外部中断0并启用,EINT0中断编号为14VICIntEnable |= (1 << 14); // 启用外部中断0VICVectAddr1 = (unsigned)external_interrupt_handler1; // 设置中断处理函数1VICVectCntl1 |= (1 << 5) | 0x0F; // 设置为外部中断1并启用,EINT1中断编号为15VICIntEnable |= (1 << 15); // 启用外部中断1
}led.h
#ifndef _LED_H_
#define _LED_H_#define PINSEL0 (*(volatile unsigned long *)0xE002C000)#define IO0PIN (*(volatile unsigned long *)0xE0028000)#define IO0DIR (*(volatile unsigned long *)0xE0028008)void led_init();void led_on(unsigned char site);void led_off(unsigned char site);char get_led_status(unsigned char site);void led_operate(unsigned char site,unsigned char on_off);
#endifled.c
#include "led.h"void led_init(){PINSEL0 = PINSEL0 & 0xffffff00;IO0DIR = IO0DIR | 0x0f;
}void led_on(unsigned char site){led_init();switch(site){case 0: IO0PIN &= ~(0x01);break;case 1:IO0PIN &= ~(0x01<<1);break;case 2: IO0PIN &= ~(0x01<<2);break;case 3: IO0PIN &= ~(0x01<<3);break;default:break;}
}void led_off(unsigned char site){led_init();switch(site){case 0: IO0PIN |= (0x01); break;case 1:IO0PIN |= (0x01<<1); break;case 2: IO0PIN |= (0x01<<2); break;case 3: IO0PIN |= (0x01<<3); break;default:break;}
}char get_led_status(unsigned char site){switch(site){case 0: return (IO0PIN >> 0) & (0x01);case 1:return (IO0PIN >> 1) & (0x01);case 2: return (IO0PIN >> 2) & (0x01);case 3: return (IO0PIN >> 3) & (0x01);default:return -1;}
}
//on_off 0:on 1:off
void led_operate(unsigned char site,unsigned char on_off){if(on_off == 0){led_on(site);}else if(on_off == 1){led_off(site);}
}delay.h
#ifndef _DELAY_H_
#define _DELAY_H_void delayms(unsigned int xms);
#endifdelay.c
#include "delay.h"void delayms(unsigned int xms){unsigned int i,j;for(i=xms;i>0;i--){for(j=2500;j>0;j--);}
}2、应用程序
application.h
#ifndef _APPLICATION_H_
#define _APPLICATION_H_void timer0_callback();void external0_callback();void external1_callback();
#endif
application.c
#include "application.h"
#include "interrupt.h"#define uchar unsigned char
#define uint unsigned int
#define MAX_CYCLE 10
#define MIN_CYCLE 1uchar num = 0;
uchar time_cycle = 1;int main(void){led_operate(0,0);led_operate(1,1);led_operate(2,1);led_operate(3,1);init_timer0_isr();init_external_isr();set_interrupt_callback(0,external0_callback);set_interrupt_callback(1,external1_callback);set_interrupt_callback(2,timer0_callback);while(1);
}//外部中断0回调函数
void external0_callback(){if(time_cycle > MIN_CYCLE){time_cycle = time_cycle - 1;}
}//外部中断1回调函数
void external1_callback(){if(time_cycle < MAX_CYCLE){time_cycle = time_cycle + 1;}
}//定时器0中断回调函数
void timer0_callback(){num++;if(num>=time_cycle){num=0;if(get_led_status(0) == 0){led_operate(0,1);led_operate(1,0);}else if(get_led_status(1) == 0){led_operate(1,1);led_operate(2,0);}else if(get_led_status(2) == 0){led_operate(2,1);led_operate(3,0);}else if(get_led_status(3) == 0){led_operate(3,1);led_operate(0,0);}}
}
六、资料下载
源码&仿真电路&芯片手册下载地址:https://download.csdn.net/download/qq_54140018/89142182
这篇关于从51到ARM裸机开发实验(009)LPC2138 中断实验的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







