本文主要是介绍GmSSL-3.1.1编译,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.源码下载:
下载地址:https://github.com/guanzhi/GmSSL/releases选择对应版本下载。
2.选择要下载的源码包:

2.编译:
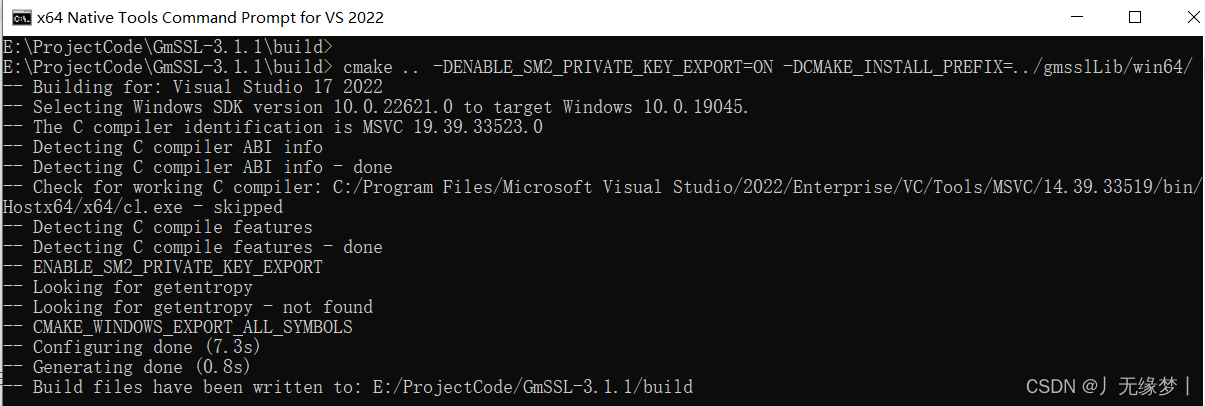
2.1 windows编译:打开vs命令行,选择想要编译的版本,x86或x64.

cd /d E:/ProjectCode/GmSSL-3.1.1 目录,mkdir build创建目录,cd build进入目录,执行命令:
cmake .. -DENABLE_SM2_PRIVATE_KEY_EXPORT=ON -DCMAKE_INSTALL_PREFIX=../gmssLib/win64/,如图所示,执行完后会在build目录下生成对应的vs版本工程文件。
通过vs打开工程即可编译windows版本相应的库。
2.2 linux 编译
与windows相同,创建build目录并进入,执行命令:cmake .. -DENABLE_SM2_PRIVATE_KEY_EXPORT=ON -DCMAKE_INSTALL_PREFIX=../GmSSLLib/aarch -DCMAKE_TOOLCHAIN_FILE=../toolchain.cmake ,DENABLE_SM2_PRIVATE_KEY_EXPORT指定启用未加密的接口,DCMAKE_INSTALL_PREFIX指定安装目录,DCMAKE_TOOLCHAIN_FILE指定编译工具链,可以设置交叉编译。


linux 交叉编译报错,非交叉编译无错误。

错误原因:getentropy()获取随机数函数找不到。
解决方法:将源代码rand_unix.c修改为如下代码。

int rand_bytes(uint8_t *buf, size_t len)
{
if (!buf) {
error_print();
return -1;
}
if (!len || len > RAND_MAX_BUF_SIZE) {
error_print();
return -1;
}
srand((unsigned int)time(NULL));
for(int i = 0; i < len; i++){
buf[i] = rand()%256;
}
//if (getentropy(buf, len) != 0) {
// error_print();
// return -1;
//}
return 1;
}
修改完后编译正常。

这篇关于GmSSL-3.1.1编译的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







