本文主要是介绍基于ARM内核的智能手环(day1),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
整体介绍
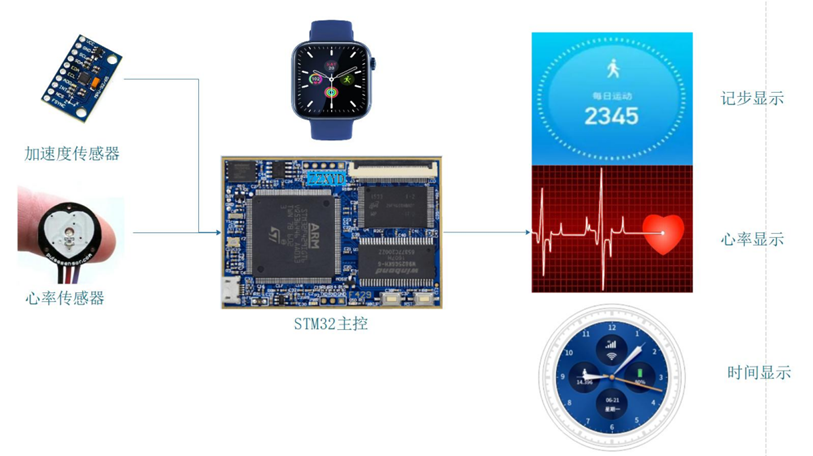
智能手环由 ARM 内核 MCU(Cortex-M 系列)、TFTLCD 屏、温湿度传感器、心率传感器、
加速度传感器等主要几部分构成。该平台硬件采用 STM32 芯片,通过对温湿度传感器的驱动编写,获取周围温湿度数据,并在 LCD 屏显示,通过对心率传感器对人体心率的采集,获取实时心率值,并在 LCD 屏绘制心率曲线图以及心率值,通过对加速度传感器对人体运动数据进行采集,结合计步算法,计算出人所走的步数,并在 LCD 屏显示,同时可以通过 RTC 记录当前时间,并在 LCD 屏显示时间以及电子数字时钟。
背景
项目名称:智能手环
项目背景: 智能手环诞生之初是为了能够记录人们的运动情况,监测用户的健康状况,以期培养健康而科学的运动和生活习惯。随着产品的优化和升级,智能手环的监测功能逐步延伸到能够对用户的活动、锻炼、心率监控等进行持续性地监测和反馈。
项目架构
智能手环由 ARM 内核 MCU(Cortex-M 系列)、TFTLCD 屏、温湿度传感器、心率传感器、
加速度传感器等主要几部分构成。该平台硬件采用 STM32 芯片,通过对温湿度传感器的驱动编写,获取周围温湿度数据,并在 LCD 屏显示,通过对心率传感器对人体心率的采集,获取实时心率值,并在 LCD 屏绘制心率曲线图以及心率值,通过对加速度传感器对人体运动数据进行采集,结合计步算法,计算出人所走的步数,并在 LCD 屏显示,同时可以通过 RTC 记录当前时间,并在 LCD 屏显示时间以及电子数字时钟。
需要实现的功能
GPIO口点灯、按键检测、非阻塞轮询、串口通信、LCD、温湿度传感器、ADC、RTC、心率传感器、加速度传感器
产品开发流程
-
项目是怎么来的?
-
竞品调研
-
市场调研
-
-
产品的立项(项目经理/老板)
-
项目的研发
硬件研发:原理板的绘制、PCB板、焊接
软件研发:配合硬件工程师实现对应的功能
-
产品的测试
硬件测试:产品使用次数上限、零部件的损耗速率
软件测试:修改BUG
-
产品的售后服务
产品的升级和BUG的修复
嵌入式
什么是嵌入式?
嵌入式系统,从客户需求出发,灵活裁剪软硬件的现代计算机技术
嵌入式应用领域

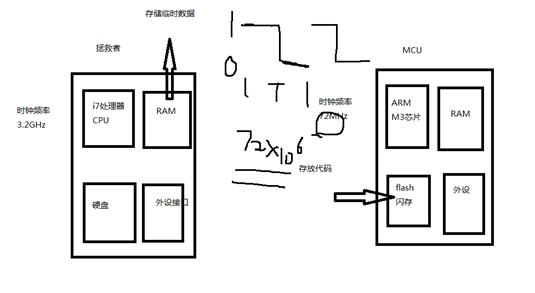
MCU
微型控制单元
单片机
微型计算机
单片机的厂商
ST意法半导体 NXP恩智浦 德州仪器
兆易创新GD32 乐鑫科技ESP32
STM32
内存更大,接口更丰富,市场占有量大
ST 意法半导体
M ARM公司 M3
32位
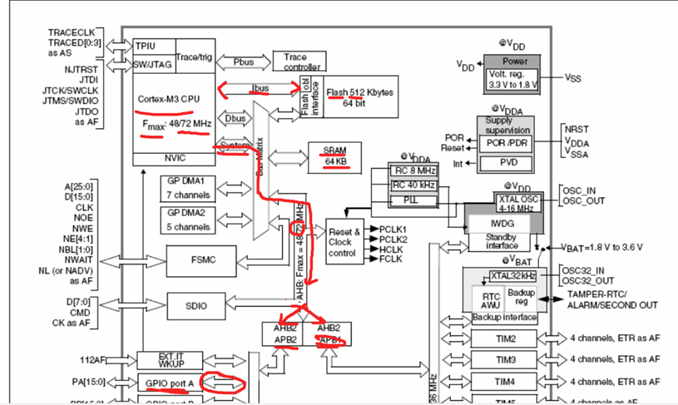
STM32内部结构
查手册
环境搭建
编写代码:用C语言写代码
编译代码:编译成可执行代码
见pdf
项目源码
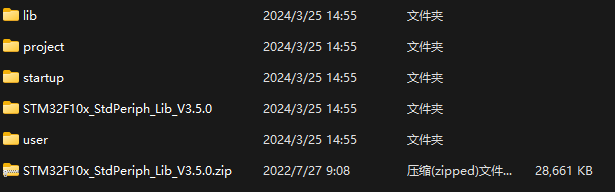
lib 库
project 自动创建
startup 项目启动文件
user 用户—main.c,main.h
api 接口文件
芯片类型
STM32F103ZET6
项目开发的三种方式
- 寄存器:位操作
- 标准库、固件库:技术成熟(已经不再更新)
- HAL库:图形化开发
LED灯与GPIO口
led灯能干啥?
状态指示灯
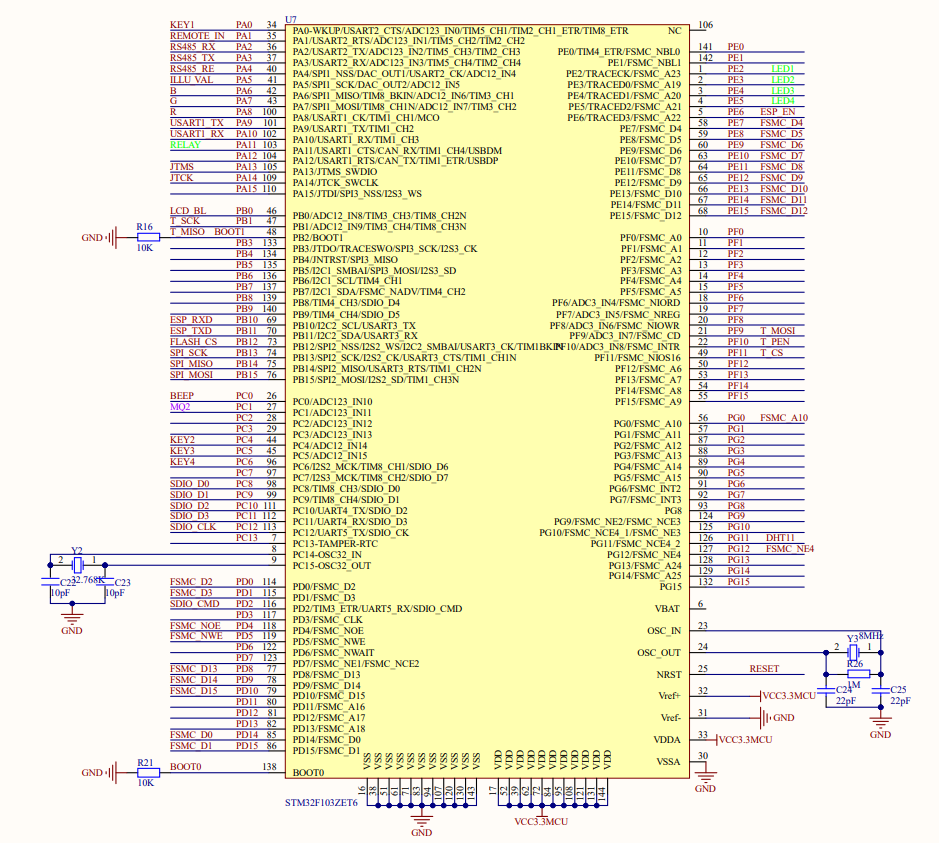
看原理图,找到对应的引脚

绿色LED1叫网络标号
网络标号:相同的网络标号是练习在一起的
GPIO口命名规则:
通用输入输出的规则
P:port(端口)
E:A B C…端口号
2:0~15 (16)端口位
GPIO口的模式:

IO口在最右边
VDD是内部电源:3.3V
锯齿状:电阻
开关闭合,内部接电源,上拉
机器只能识别0和1
电压值:模拟量
数字量:0 1
所以我们规定
0:0V
1:2.5-5V
VSS:内部地
开关闭合为下拉
如果没有上拉和下拉,就是浮空数
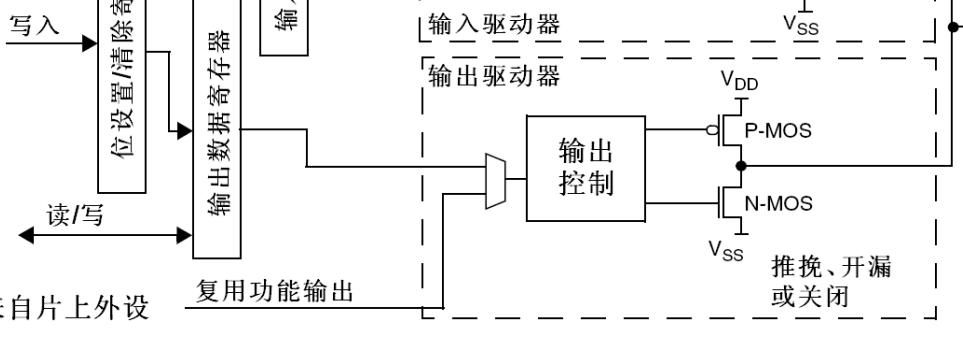
两个输出源
如果从输出数据寄存器输出,叫通用输出
片上外设:复用输出
推挽可以输出输出
开漏只能输出0
-
输入模式:
-
上拉输入:默认输入高电平
-
下拉输入:默认输入低电平
-
浮空输入:没有上下拉
-
模拟输入:ADC
-
-
输出模式:
- 推挽输出:0 1
- 开漏输出:不能通过自身输出高电平信号
- 复用推挽
- 复用开漏
所以我们控制led灯所用的是输出模式中的推挽输出
PE2 输出 0 灯开
输出1 灯关
找到对应的IO口
LED1 —— PE2
LED2 —— PE3
3.配置IO口模式
PE2 推挽输出
写代码

#include "main.h" int main(void)
{//LED1 PE2 推挽输出//配置IO口步骤//step1.开时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);//step2.配置IO口模式GPIO_InitTypeDef GPIO_InitSTRUCT;GPIO_InitSTRUCT.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitSTRUCT.GPIO_Pin = GPIO_Pin_2;GPIO_InitSTRUCT.GPIO_Speed = GPIO_Speed_50MHz;//step3.初始化IO口GPIO_Init(GPIOE,&GPIO_InitSTRUCT);//PE2输出低电平GPIO_WriteBit(GPIOE,GPIO_Pin_2,Bit_RESET);while(1){}
}
然后输出高低电平即可控制灯的亮灭
GPIO_WriteBit(GPIOE,GPIO_Pin_2,Bit_SET);
那么每次都这样写是不是有点点麻烦
所以我们宏定义一下
#define LED1_ON GPIO_WriteBit(GPIOE,GPIO_Pin_2,Bit_RESET)
#define LED1_OFF GPIO_WriteBit(GPIOE,GPIO_Pin_2,Bit_SET)
这样我们就可以轻松的控制小灯的亮灭了
下一篇笔记我们则会学习如何通过寄存器反转电平状态
这篇关于基于ARM内核的智能手环(day1)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






