本文主要是介绍PLC_博图系列☞RS:复位/置位触发器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

PLC_博图系列☞RS:复位/置位触发器
文章目录
- PLC_博图系列☞RS:复位/置位触发器
- 背景介绍
- RS:复位/置位触发器
- 说明
- 参数
- 示例
关键字:
PLC、
西门子、
博图、
Siemens 、
RS
背景介绍
这是一篇关于
PLC编程的文章,特别是关于西门子的博图软件。我并不是专业的PLC编程人员,也不懂电路,所以如果你希望从这里学习PLC编程技术,可能会有些失望。然而,因为工作需要,我开始了解PLC编程,特别是西门子的博图软件,并记录了这些经验。随着我国工业4.0的推进,相信会有更多的人从事类似的工作。如果这篇文章能对你有所帮助,欢迎点赞和关注我❥(^_-)。
RS:复位/置位触发器
说明
可以使用“复位置位触发器”指令,根据输入 R 和 S1 的信号状态,复位或置位指定操作数的位。如果输入 R 的信号状态为“1”,且输入 S1 的信号状态为“0”,则指定的操作数将复位为“0”。如果输入 R 的信号状态为“0”且输入 S1 的信号状态为“1”,则将指定的操作数置位为“1”。
输入 S1 的优先级高于输入 R。当输入 R 和 S1 的信号状态均为“1”时,将指定操作数的信号状态置位为“1”。
如果两个输入 R 和 S1 的信号状态都为“0”,则不会执行该指令。因此操作数的信号状态保持不变。
操作数的当前信号状态被传送到输出 Q,并可在此进行查询。
参数
下表列出了“复位置位触发器”指令的参数:
| 参数 | 声明 | 数据类型 | 存储区 | 存储区 | 说明 |
|---|---|---|---|---|---|
| S7-1200 | S7-1500 | ||||
| R | Input | BOOL | I、Q、M、D、L 或常量 | I、Q、M、D、L、T、C 或常量 | 使能复位 |
| S1 | Input | BOOL | I、Q、M、D、L 或常量 | I、Q、M、D、L、T、C 或常量 | 使能置位 |
| <操作数> | InOut | BOOL | I、Q、M、D、L | I、Q、M、D、L | 待复位或置位的操作数。 |
| Q | Output | BOOL | I、Q、M、D、L | I、Q、M、D、L | 操作数的信号状态 |
示例
以下示例说明了该指令的工作原理:
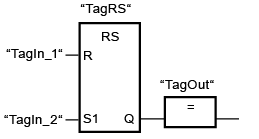
满足下列条件时,将复位操作数“TagRS”和“TagOut”:
- 操作数“TagIn_1”的信号状态为“1”。
- 操作数“TagIn_2”的信号状态为“0”。
满足下列条件时,将置位操作数“TagRS”和“TagOut”:
- 操作数“TagIn_1”的信号状态为“0”,且操作数“TagIn_2”的信号状态为“1”。
- 操作数“TagIn_1”和“TagIn_2”的信号状态为“1”。
**注:**以上部分内容来之博图V16帮助文档。

这篇关于PLC_博图系列☞RS:复位/置位触发器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









