本文主要是介绍PX4软件开发环境搭建以及开发方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、开发环境搭建
在CSDN上看了很多博客,感觉对于PX4的开发环境搭建还是一知半解,一头雾水。结合自己的疑问,又去看了些视频,查了一些资料,把PX4软件开发做一个完整的了解。
开源飞控包括PX4固件,APM固件还有穿越机。地面站包括QGC(QGroundcontol)地面站,MP(MissionPlan)地面站,Betaflight。仿真平台包括gazebo(树林穿越仿真需要自己建模型),jMAVSim。ROS是机器人操作系统,用于联通仿真无人机;flightplot飞行日记。PX4与地面站之间的通信是用mavlink协议。QT可以对地面站进行二次开发,源码在github可以下载。
PX4二次开发在px4官网上有Linux系统和window系统还有VSCode这几种。在ubuntu系统比较高效方便。开发方式:在ubuntu系统中下载PX4固件,涉及到固件下载,代码查看工具VSCode,编译环境,Gazebo仿真。编译环境的搭建涉及到Cmake,ubuntu的使用。从PX4固件下载到可以仿真看到一家虚拟无人机飞行必须学会:linux系统安装,ubuntu基础配置,linux基础命令,git基础使用,px4下载,编译环境搭建,代码烧入和仿真。
---------------------------------------------------------------------------------------------------------------------------------
新手上路 - 代码编译 - 《PX4开发指南》 - 书栈网 · BookStack
使用git指令下载源码,将固件代码放在了/home/xxx/src/Firmware。
编译指令:
cd Firmware
make px4fmu-v2_default在编译成功之后,用指令将编译之后二进制代码通过USB上传到飞控硬件:
make px4fmu-v2_default upload在使用开发指南的步骤去编译工具链之后,python包下载失败,影响后面的固件库编译,编译失败。各种安装包很多指令,而且出现很多版本旧或者其它问题,真的很烦。px4环境搭建难点在于配置好基本的依赖包,坑点是版本问题。
然后又转头换了种方法:安装依赖(各种工具链)
bash ./Tools/setup/ubuntu.sh使用这个指令检查是否安装成功:
arm-none-eabi-gcc --version
如果安装失败,那么:
sudo apt-get update
sudo apt install gcc-arm-none-eabi
再检查一下是否成功。成功之后,将固件库编译一下(使用前面的编译指令和下载指令)。最后成功下载到板子上面。
需要注意:下载固件时,把USB连接到虚拟机而不是主机。在从git下载完固件之后,安装依赖和编译下载程序都要在firmware目录下进行。
---------------------------------------------------------------------------------------------------------------------------------
上面我们完成了固件下载到ubuntu,固件编译,固件下载到PIXHAWK的过程。那么,如何进行源码开发呢?
这里我选择使用VSCode来进行开发。
使用VSCode打开文件夹之后,按照提示,允许下载需要的插件。如果提示安装新的cmake,拒绝。然后搜索框中提示为程序选择工具包。选择由电脑猜测需要的工具包。1.之后,点击运行和调试,添加配置,会跳转到launch.json文件,提示需要为目标文件配置。添加jlink。然后点击左下角瓢虫符号。2.或者,没有jlink选项,提示选择目标文件,选择px4之后,点击运行和调试选择stl(gz),点击瓢虫符号。
Visual Studio Code IDE (VSCode) | PX4 User Guide (main)
--------------------------------------------------------------------------------------------------------------------------------
到目前为止,完成了ubuntu命令行的PX4源码编译,VSCode源码编译和试运行。接下来,搭建仿真环境。
在PX4固件源码目录下,打开终端,运行jMAVSim,这使我们能够转向实际硬件和IDE之前进行仿真验证系统设置:
make px4_sitl jmavsim下载地面站,并连接开发板进行校准和设置:
Radio Setup | QGC Guide (master) (qgroundcontrol.com)
1.jMAVSim如何利用键盘来实现飞行控制呢?相关的命令是什么?
构建 PX4 软件 |PX4 用户指南(主)
jmavsim使用说明-CSDN博客
2.那么,如何实现联合仿真呢?
在打开jMAVSim之后,打开QGC,会自动连接。现在试了一下,发现jMAVSim使用命令来控制飞行会需要一点时间去熟悉。
因为我的目标是使用激光测距传感器,所以jMAVSim仿真器并没有很大作用,还要gazebo来。这个就放到后面在搞吧。
---------------------------------------------------------------------------------------------------------------------------------
二、二次开发(CMake)
接下来,学习如何二次开发。
以创建一个小的应用程序为例。首先,它由一个c文件和一个cmake定义组成。cmake是用来告诉工具链如何构建应用程序的。
1.创建一个新目录: PX4-Autopilot / src / examples / px4_simple_app。在这个目录下创建一个.c文件。这个.c文件里应该是下面这样的:
/*** @file px4_simple_app.c* Minimal application example for PX4 autopilot** @author Example User <mail@example.com>*/#include <px4_platform_common/log.h>__EXPORT int px4_simple_app_main(int argc, char *argv[]);int px4_simple_app_main(int argc, char *argv[])
{PX4_INFO("Hello Sky!");return OK;
}2.创建并打开一个名为 CMakeLists.txt 的新 cmake 定义文件。如下:
px4_add_module(MODULE examples__px4_simple_appMAIN px4_simple_appSTACK_MAIN 2000SRCSpx4_simple_app.cDEPENDS)这个实例从模块描述生成静态库,列出了模块入口,将该模块命令注册到nuttx,以便可以从PX4 Shell或者sitl控制台调用。
3.创建并打开一个名为 Kconfig 的新 Kconfig 定义文件,并定义用于命名的符号。 如下:
menuconfig EXAMPLES_PX4_SIMPLE_APPbool "px4_simple_app"default n---help---Enable support for px4_simple_app4.写好代码之后,需要编译。在 px4board 文件中添加相应的 Kconfig 键或运行boardconfig:
CONFIG_EXAMPLES_PX4_SIMPLE_APP=y
make px4_fmu-v4_default boardconfig5.在跳出的页面上,选中emamples------>PX4 simple app。在测试应用模式下(调试选择stil gz),点击左下角的瓢虫符号,进行仿真调试。然后输入px4_simple_app,最后他会显示INF0 [px4_simple_app]Hello Sky!
5. 如果要将程序下载到主板上,那么:make px4_fmu-v2_default make px4_fmu-v2_default upload
--------------------------------------------------------------------------------------------------------------------------------
三、传感器
在学习了前面最小应用程序的基础上,我们需要去订阅传感器数据。这涉及到μORB机制和消息订阅的知识。
First Application Tutorial (Hello Sky) | PX4 User Guide (main)![]() https://docs.px4.io/main/en/modules/hello_sky.html
https://docs.px4.io/main/en/modules/hello_sky.html
教程 - 编写应用程序 - 《PX4开发指南》 - 书栈网 · BookStack![]() https://www.bookstack.cn/read/PX4Devguide/zh-tutorials-tutorial_hello_sky.md#%E7%AC%AC%E4%BA%94%E6%AD%A5%EF%BC%9A%E8%AF%BB%E5%8F%96%E4%BC%A0%E6%84%9F%E5%99%A8%E6%95%B0%E6%8D%AE
https://www.bookstack.cn/read/PX4Devguide/zh-tutorials-tutorial_hello_sky.md#%E7%AC%AC%E4%BA%94%E6%AD%A5%EF%BC%9A%E8%AF%BB%E5%8F%96%E4%BC%A0%E6%84%9F%E5%99%A8%E6%95%B0%E6%8D%AE
PX4二次开发——uorb订阅_px4_uorb_subs-CSDN博客![]() https://blog.csdn.net/qq_36394290/article/details/109148643
https://blog.csdn.net/qq_36394290/article/details/109148643
1.订阅主题
2.测试订阅结果
3.发布数据
4.运行应用
传感器这一部分开始,需要在飞控中另写代码,所以我另开一篇博客。
----------------------------------------------------------------------------------------------------------------------------
四、 程序运行过程
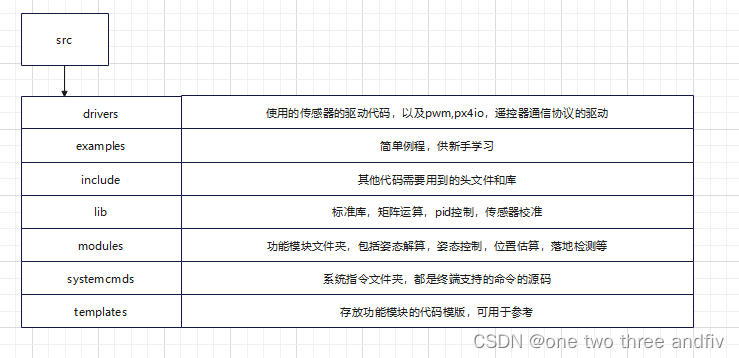
PX4二次开发——程序运行过程-CSDN博客![]() https://blog.csdn.net/qq_36394290/article/details/109113019对程序运行有整体上的理解:当pixhawk运行起来的时候,就是一个个应用程序,程序之间相互通信,然后发到下一层(驱动层)来实现控制功能(电机转速)。我们进行二次开发就是在应用层进行应用程序的开发,如果加入了传感器,还需要对驱动层进行开发。在Firmware\src\modules下面就相当于一些应用进程,这里面可以根据rcS选择启动或者不启动,启动后的进程,在宏观上我们可以理解为并行处理,他们都是同时在运行的,可以理解为多个While(1),在规定时间执行一个while(1),然后跳到下一个。
https://blog.csdn.net/qq_36394290/article/details/109113019对程序运行有整体上的理解:当pixhawk运行起来的时候,就是一个个应用程序,程序之间相互通信,然后发到下一层(驱动层)来实现控制功能(电机转速)。我们进行二次开发就是在应用层进行应用程序的开发,如果加入了传感器,还需要对驱动层进行开发。在Firmware\src\modules下面就相当于一些应用进程,这里面可以根据rcS选择启动或者不启动,启动后的进程,在宏观上我们可以理解为并行处理,他们都是同时在运行的,可以理解为多个While(1),在规定时间执行一个while(1),然后跳到下一个。
1.bootloader和nuttx启动:bootloader好比计算机系统启动前的一段引导程序,负责引导进入nuttx系统。它是在操作系统内核运行之前运行的,是嵌入式系统在上电之后执行的第一段代码。在他完成CPU和相关硬件的初始化之后,再将操作系统映像或者固化的嵌入式应用程序装到内存中然后跳转到操作系统所在的空间。
2.处理器的固件烧写和运行流程:编译时,把default.cmake文件中的配置全都烧写到固件中去。上电之后,开启PX4IO,PX4FMU,然后进入操作系统。芯片底层初始化(GPIO,时钟等),操作系统底层初始化(队列,消息结构体),基本进程的启动。PX4FMU中注意rcs启动脚本(具体位置是在Firmware/ROMFS/px4fmu_common/init.d/rcs):启动命令,启动传感器,启动px4io,实现各种核心算法。PX4IO将基础环境初始化(PWM,ADC,串口等),进行遥控器的输入数据的处理,串口数据处理。
---------------------------------------------------------------------------------------------------------------------------------
五、PX4代码架构
PX4二次开发——PX4程序架构_px4 二次开发-CSDN博客![]() https://blog.csdn.net/qq_36394290/article/details/109278011
https://blog.csdn.net/qq_36394290/article/details/109278011

这篇关于PX4软件开发环境搭建以及开发方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





