本文主要是介绍netty-transport-native-epoll-4.1.25.Final-linux-aarch_64.jar编译指南,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
-
背景介绍:
在编译netty-transport-native-epoll-4.1.25.Final-linux-aarch_64.jar的时候,论坛上看到很多指导,步骤都不太一样。验证了几个指导,都没法成功编译。
-
依赖:
在编译netty-transport-native-epoll-4.1.25.Final之前,必须编译netty-tcnative-2.0.8.Final。
注:不同的netty-transport-native-epoll版本,对应不同的netty-tcnative版本。如果不清晰依赖的版本,可以先编译netty-transport-native-epoll,报错提示将会把版本信息打印出来。
-
编译netty-tcnative-2.0.8.Final
-
-
安装依赖
yum install java-1.8.0* git gcc gcc-c++ make cmake3 libtool autoconf automake openssl-devel ninja-build golang apr-devel -y -
CMake 3和ninja-build设置软连接
ln -s /usr/bin/cmake3 /usr/bin/cmake ln -s /usr/bin/ninja-build /usr/bin/ninja如果yum源里边没有cmake3和ninja-build,可以源码编译安装。
-
编译netty需要使用maven
#下载 wget https://archive.apache.org/dist/maven/maven-3/3.5.4/binaries/apache-maven-3.5.4-bin.tar.gz #解压 tar zxvf apache-maven-3.5.4-bin.tar.gz -C /usr/local#配置环境变量 export PATH=/usr/local/apache-maven-3.5.4/bin:$PATH -
编译安装
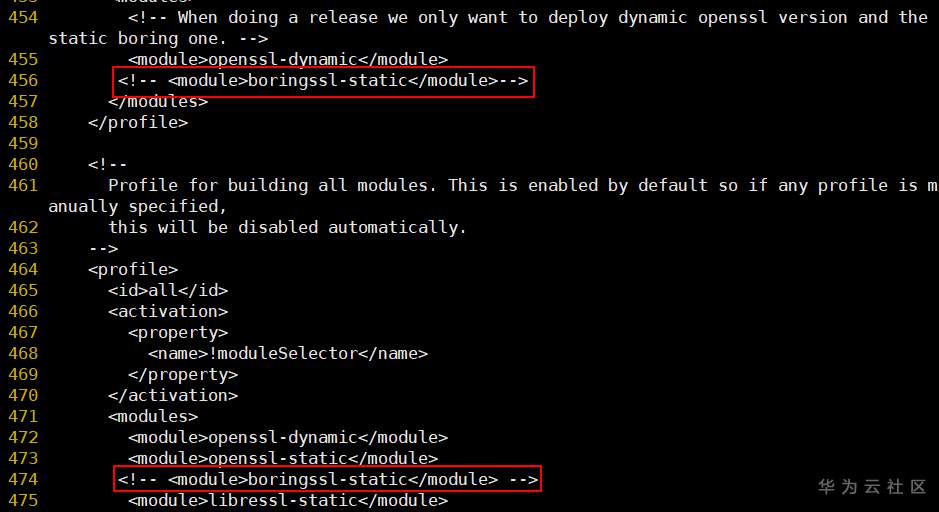
#下载 wget https://github.com/netty/netty-tcnative/archive/netty-tcnative-parent-2.0.8.Final.tar.gz #进入目录 cd netty-tcnative-netty-tcnative-parent-2.0.8.Final/修改pom.xml文件,屏蔽456行和474行代码
编译安装:
mvn clean install -
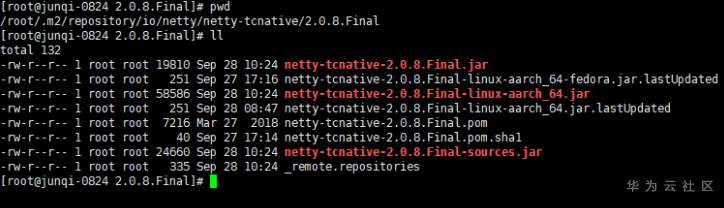
查看
安装完成之后,将在maven本地仓库里边查看的。
-
-
编译netty-transport-native-epoll
-
下载编译
wget https://github.com/netty/netty/archive/netty-4.1.25.Final.zip unzip netty-4.1.25.Final.zip cd netty-netty-4.1.25.Final#编译,整个过程将拉取依赖jar包,比较慢 ./mvnw clean install -pl transport-native-unix-common -DskipTests=true ./mvnw clean install -pl transport-native-epoll -DskipTests=true -
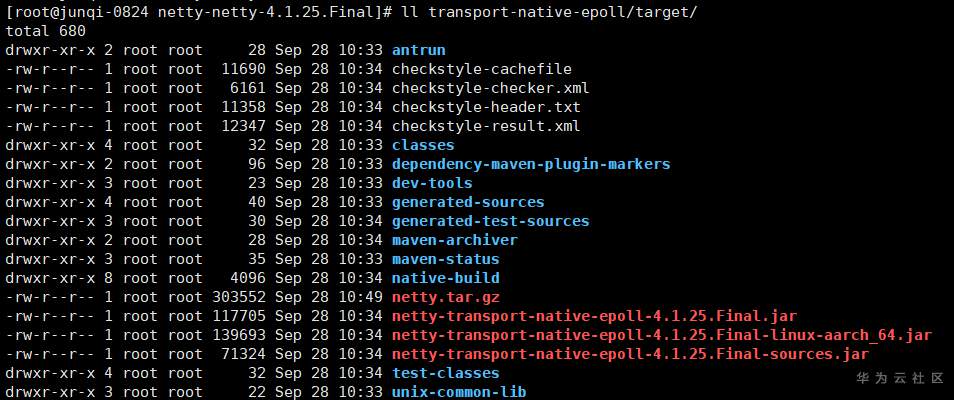
查看编译结果
-
这篇关于netty-transport-native-epoll-4.1.25.Final-linux-aarch_64.jar编译指南的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








