本文主要是介绍linux省去驱动直接从应用层寄存器操作,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
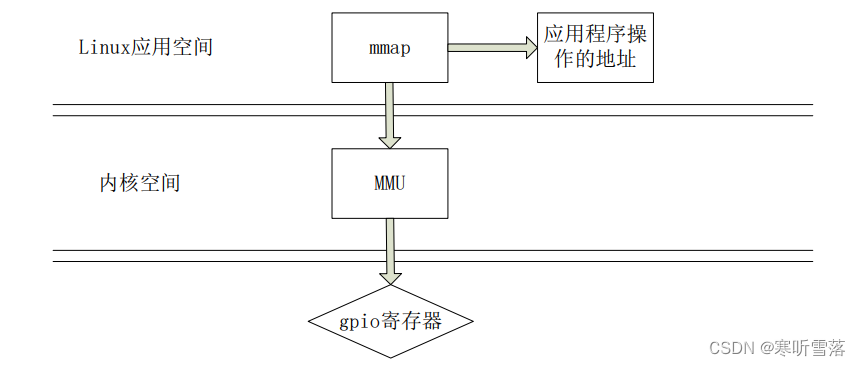
这个外设的功能已经在zynq sdk裸机下验证通过,如果这个外设没有用到中断,我们可以通过linux下映射寄存器的方法,将这个裸机下的程序直接移植到linux下使用,这样就可以省去硬件开发驱动的工作。
一,linux内存映射

二,原理图
三,linux应用层代码解析
1,pl_gpio.h
#ifndef PL_GPIO_H
#define PL_GPIO_H
#include <stdint.h>typedef uint8_t u8;
typedef uint16_t u16;
typedef uint32_t u32;
typedef uint64_t u64;
#define XGPIO_CHAN_OFFSET 8
#define XGPIO_DATA_OFFSET 0x0 /**< Data register for 1st channel */
#define XGPIO_TRI_OFFSET 0x4 /**< I/O direction reg for 1st channel */
#define XGPIO_DATA2_OFFSET 0x8 /**< Data register for 2nd channel */
#define XGPIO_TRI2_OFFSET 0xC /**< I/O direction reg for 2nd channel */
#define XGPIO_GIE_OFFSET 0x11C /**< Glogal interrupt enable register */
#define XGPIO_ISR_OFFSET 0x120 /**< Interrupt status register */
#define XGPIO_IER_OFFSET 0x128 /**< Interrupt enable register */typedef uintptr_t UINTPTR;typedef struct
{UINTPTR BaseAddress; /* Device base address */u32 IsReady; /* Device is initialized and ready */int InterruptPresent; /* Are interrupts supported in h/w */int IsDual; /* Are 2 channels supported in h/w */
} XGpio;#define XGpio_Out32 Xil_Out32
#define XGpio_In32 Xil_In32#define XGpio_WriteReg(BaseAddress, RegOffset, Data) \XGpio_Out32((BaseAddress) + (RegOffset), (u32)(Data))#define XGpio_ReadReg(BaseAddress, RegOffset) \XGpio_In32((BaseAddress) + (RegOffset))#define XIL_COMPONENT_IS_READY 0x11111111U
#define XPAR_AXI_GPIO_1_BASEADDR 0x800A0000/*The following constant is used to determine which channel of the GPIO is* used for the LED if there are 2 channels supported.*/
#define LED_CHANNEL 1#define LED 0x01 /* Assumes bit 0 of GPIO is connected to an LED */void XGpio_SetDataDirection(XGpio *InstancePtr, unsigned Channel,u32 DirectionMask);
void XGpio_DiscreteWrite(XGpio * InstancePtr, unsigned Channel, u32 Data);
void XGpio_DiscreteClear(XGpio * InstancePtr, unsigned Channel, u32 Mask);
#endif
pl_gpio.c
#include "pl_gpio.h"
static inline u32 Xil_In32(UINTPTR Addr)
{return *(volatile u32 *) Addr;
}
static inline void Xil_Out32(UINTPTR Addr, u32 Value)
{
#ifndef ENABLE_SAFETYvolatile u32 *LocalAddr = (volatile u32 *)Addr;*LocalAddr = Value;
#elseXStl_RegUpdate(Addr, Value);
#endif
}void XGpio_SetDataDirection(XGpio *InstancePtr, unsigned Channel,u32 DirectionMask)
{XGpio_WriteReg(InstancePtr->BaseAddress, ((Channel - 1) * XGPIO_CHAN_OFFSET) + XGPIO_TRI_OFFSET,DirectionMask);
}void XGpio_DiscreteWrite(XGpio * InstancePtr, unsigned Channel, u32 Data)
{XGpio_WriteReg(InstancePtr->BaseAddress,((Channel - 1) * XGPIO_CHAN_OFFSET) + XGPIO_DATA_OFFSET,Data);
}void XGpio_DiscreteClear(XGpio * InstancePtr, unsigned Channel, u32 Mask)
{u32 Current;unsigned DataOffset;//Calculate the offset to the data register of the GPIO */DataOffset = ((Channel - 1) * XGPIO_CHAN_OFFSET) + XGPIO_DATA_OFFSET;//Read the contents of the data register, merge in Mask and write back resultsCurrent = XGpio_ReadReg(InstancePtr->BaseAddress, DataOffset);Current &= ~Mask;XGpio_WriteReg(InstancePtr->BaseAddress, DataOffset, Current);
}
2,ps_gpio.h
#ifndef PS_GPIO_H
#define PS_GPIO_H
#include <stdint.h>
typedef uint8_t u8;
typedef uint16_t u16;
typedef uint32_t u32;
typedef uint64_t u64;
#define XGPIOPS_SIX 6U
#define XPAR_PSU_GPIO_0_BASEADDR 0xFF0A0000extern u64 config_baseaddr;void XGpioPs_SetDirectionPin(u32 Pin, u32 Direction);
#endif
ps_gpio.c
#include "ps_gpio.h"
u64 config_baseaddr;
#define XGPIOPS_DATA_LSW_OFFSET 0x00000000U /* Mask and Data Register LSW, WO */
#define XGPIOPS_DATA_MSW_OFFSET 0x00000004U /* Mask and Data Register MSW, WO */
#define XGPIOPS_DATA_OFFSET 0x00000040U /* Data Register, RW */
#define XGPIOPS_DATA_RO_OFFSET 0x00000060U /* Data Register - Input, RO */
#define XGPIOPS_DIRM_OFFSET 0x00000204U /* Direction Mode Register, RW */
#define XGPIOPS_OUTEN_OFFSET 0x00000208U /* Output Enable Register, RW */#define XGPIOPS_DATA_MASK_OFFSET 0x00000008U /* Data/Mask Registers offset */
#define XGPIOPS_DATA_BANK_OFFSET 0x00000004U /* Data Registers offset */
#define XGPIOPS_REG_MASK_OFFSET 0x00000040U /* Registers offset */static inline u32 Xil_In32(u64 Addr)
{return *(volatile u32 *) Addr;
}static inline void Xil_Out32(u64 Addr, u32 Value)
{volatile u32 *LocalAddr = (volatile u32 *)Addr;*LocalAddr = Value;
}#define XGpioPs_ReadReg(BaseAddr, RegOffset) \Xil_In32((BaseAddr) + (u64)(RegOffset))#define XGpioPs_WriteReg(BaseAddr, RegOffset, Data) \Xil_Out32((BaseAddr) + (u64)(RegOffset), (u32)(Data))void XGpioPs_GetBankPin(u8 PinNumber, u8 *BankNumber, u8 *PinNumberInBank)
{u32 XGpioPsPinTable[XGPIOPS_SIX] = {0};/*This structure defines the mapping of the pin numbers to the banks when* the driver APIs are used for working on the individual pins.*/XGpioPsPinTable[0] = (u32)25; /* 0 - 25, Bank 0 */XGpioPsPinTable[1] = (u32)51; /* 26 - 51, Bank 1 */XGpioPsPinTable[2] = (u32)77; /* 52 - 77, Bank 2 */XGpioPsPinTable[3] = (u32)109; /* 78 - 109, Bank 3 */XGpioPsPinTable[4] = (u32)141; /* 110 - 141, Bank 4 */XGpioPsPinTable[5] = (u32)173; /* 142 - 173 Bank 5 */*BankNumber = 0U;while (*BankNumber < XGPIOPS_SIX) {if (PinNumber <= XGpioPsPinTable[*BankNumber]) {break;}(*BankNumber)++;}if (*BankNumber == (u8)0) {*PinNumberInBank = PinNumber;}else {*PinNumberInBank=(u8)((u32)PinNumber%(XGpioPsPinTable[*BankNumber-(u8)1]+ (u32)1));}
}void XGpioPs_SetDirectionPin(u32 Pin, u32 Direction)
{u8 Bank;u8 PinNumber;u32 DirModeReg;// Get the Bank number and Pin number within the bankXGpioPs_GetBankPin((u8)Pin, &Bank, &PinNumber);DirModeReg = XGpioPs_ReadReg(config_baseaddr,((u32)(Bank) * XGPIOPS_REG_MASK_OFFSET) + XGPIOPS_DIRM_OFFSET);if (Direction!=(u32)0) // Output Direction{ DirModeReg |= ((u32)1 << (u32)PinNumber);} else //Input Direction{DirModeReg &= ~ ((u32)1 << (u32)PinNumber);}XGpioPs_WriteReg(config_baseaddr,((u32)(Bank) * XGPIOPS_REG_MASK_OFFSET) +XGPIOPS_DIRM_OFFSET, DirModeReg);
}void XGpioPs_SetOutputEnablePin(u32 Pin, u32 OpEnable)
{u8 Bank;u8 PinNumber;u32 OpEnableReg;// Get the Bank number and Pin number within the bank XGpioPs_GetBankPin((u8)Pin, &Bank, &PinNumber);OpEnableReg = XGpioPs_ReadReg(config_baseaddr,((u32)(Bank) * XGPIOPS_REG_MASK_OFFSET) + XGPIOPS_OUTEN_OFFSET);if (OpEnable != (u32)0) //Enable Output Enable{ OpEnableReg |= ((u32)1 << (u32)PinNumber);} else //Disable Output Enable {OpEnableReg &= ~ ((u32)1 << (u32)PinNumber);}XGpioPs_WriteReg(config_baseaddr,((u32)(Bank) * XGPIOPS_REG_MASK_OFFSET) + XGPIOPS_OUTEN_OFFSET, OpEnableReg);
}void XGpioPs_WritePin(u32 Pin, u32 Data)
{u32 RegOffset;u32 Value;u8 Bank;u8 PinNumber;u32 DataVar = Data;// Get the Bank number and Pin number within the bankXGpioPs_GetBankPin((u8)Pin, &Bank, &PinNumber);if (PinNumber > 15U) {// There are only 16 data bits in bit maskable registerPinNumber -= (u8)16;RegOffset = XGPIOPS_DATA_MSW_OFFSET;} else {RegOffset = XGPIOPS_DATA_LSW_OFFSET;}/*Get the 32 bit value to be written to the Mask/Data register where* the upper 16 bits is the mask and lower 16 bits is the data.*/DataVar &= (u32)0x01;Value = ~((u32)1 << (PinNumber + 16U)) & ((DataVar << PinNumber) | 0xFFFF0000U);XGpioPs_WriteReg(config_baseaddr,((u32)(Bank) * XGPIOPS_DATA_MASK_OFFSET) +RegOffset, Value);
}3,main.c
<1>关于gpio寄存器地址,都是从vivado导出后的sdk gpio例程中复制出来,开发思路也应该是这样,先用sdk裸机程序验证。很多外设和 PL端的 IP,sdk会生成好操作的方法和操作的地址,这样就不需要我们再去找对应关系。
<2>打开/dev/mem,使用选项O_SYNC向外部写入数据通常数据是写入到cache缓冲,O_SYNC将确保数据写入至外设才返回,需要注意这里的O_SYNC,只会影响写操作,对读无影响。
<3>msync的调用:如果需要向外设一次写入比较多的数据,此时如果调用O_SYNC,将会严重影响系统的性能,此时如果不使用O_SYNC,而是在写完数据后,调用msync,这样会提升写的性能。
<4>读操作一致性问题:如果需要读外设的数据,因为cache的存在,应用中取到的数据是cache中的数据,而不是外设的最新状态,此时读到的可能是一个错误的值。
#include <stdio.h>
#include <stdint.h>
#include <unistd.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/mman.h>
#include "ps_gpio.h"
#include "pl_gpio.h"
int main(void)
{int mem_fd;XGpio Gpio;mem_fd = open("/dev/mem", O_RDWR | O_SYNC);if (mem_fd < 0){printf("open /dev/mem failed\r\n");return 0;}Gpio.BaseAddress = (u64)mmap(NULL, 1024, PROT_READ | PROT_WRITE, MAP_SHARED, mem_fd, XPAR_AXI_GPIO_1_BASEADDR );if((u64)MAP_FAILED == Gpio.BaseAddress){printf("mmap fail\r\n");}XGpio_SetDataDirection(&Gpio, LED_CHANNEL, ~LED);while(1){/* Set the GPIO output to be low. */XGpio_DiscreteWrite(&Gpio, LED_CHANNEL, LED);usleep(500000);/* Set the GPIO Output to High. */XGpio_DiscreteClear(&Gpio, LED_CHANNEL, LED);msync((void *)Gpio.BaseAddress, 1024, MS_ASYNC);usleep(500000);}return 0;
}
这篇关于linux省去驱动直接从应用层寄存器操作的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







