本文主要是介绍STM32串口通信(发送与接收数据),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 前言
- 一、介绍部分
- 通信接口
- 术语解释
- 串口通信简介
- 硬件电路
- 电平标准
- 串口参数
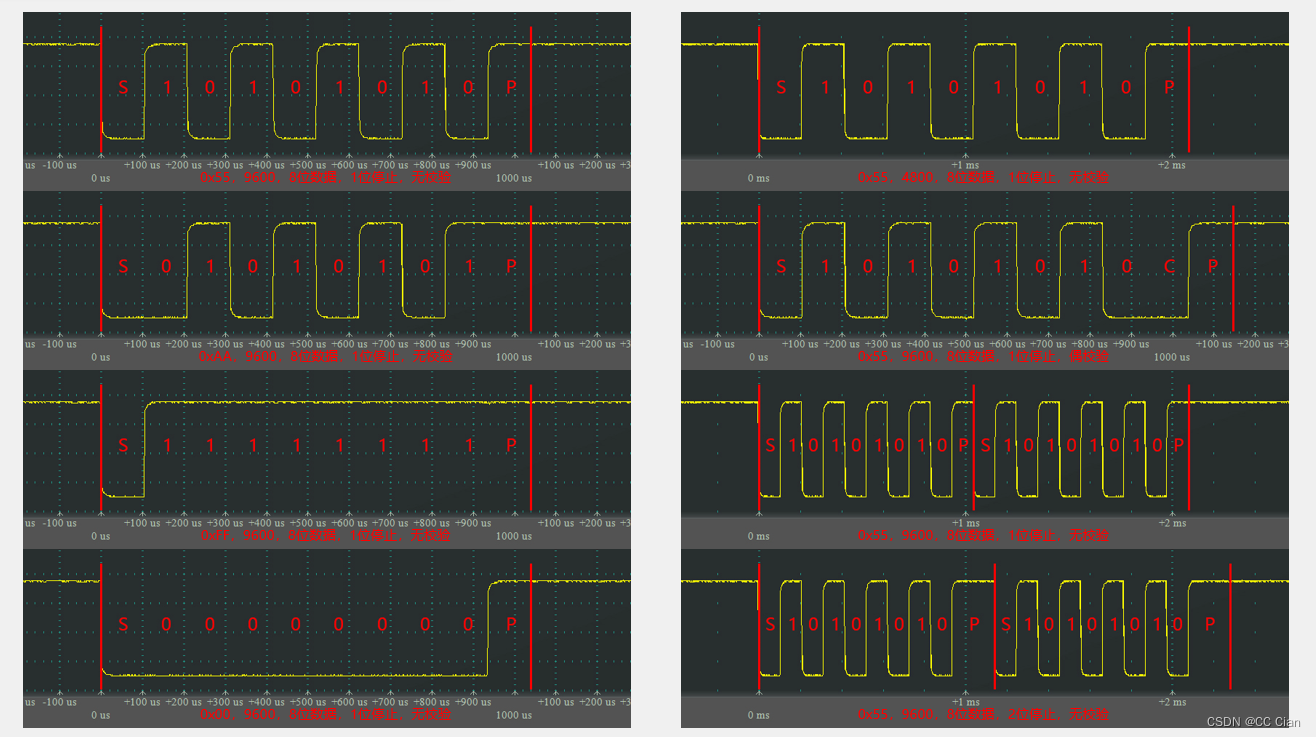
- 串口时序
- USART简介
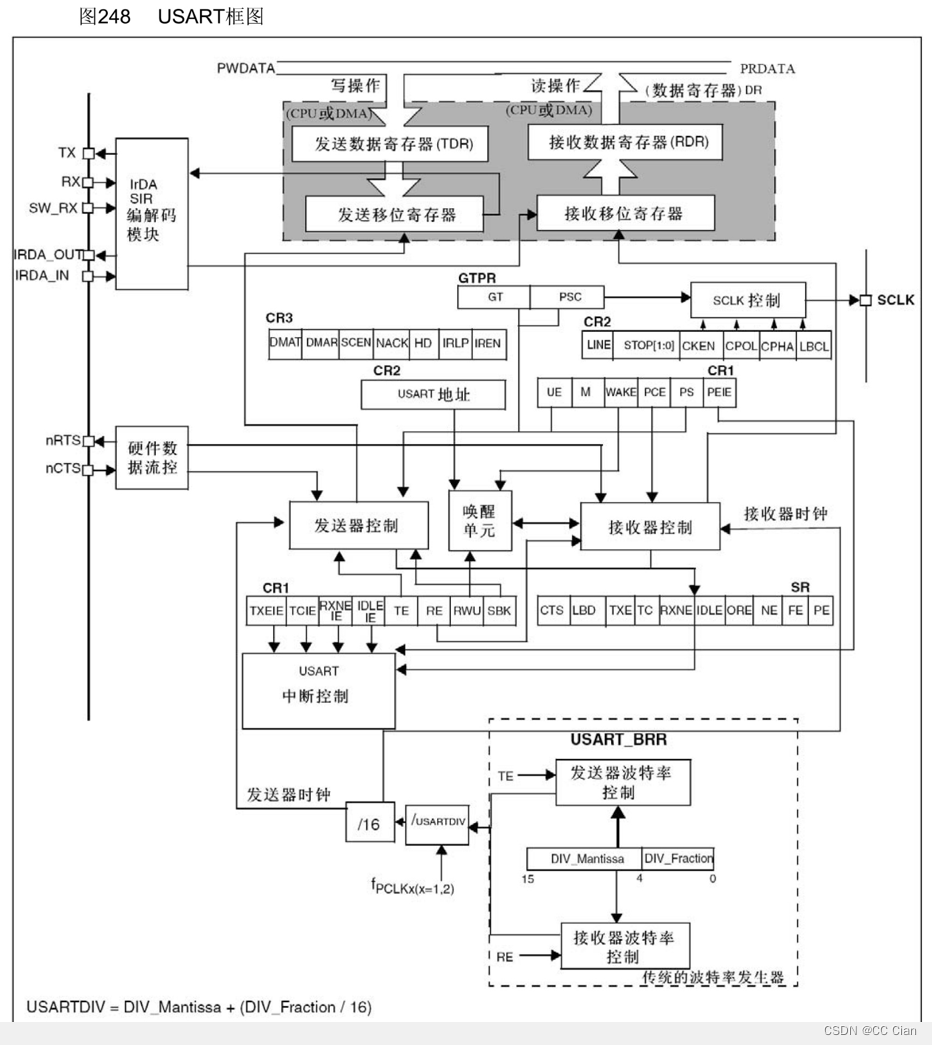
- USART框图
- USRAT基本结构
- 数据帧
- 起始位检测
- 波特率发生器
- CH340G
- 二、实例部分
- 使用串口发送数据
- 接线图
- 代码实现
- 重定向printf需要勾上Use MicroLIB
- 中文不乱码方法
- 串口的发送与接收数据
- 线路连接与上面一致
- 代码实现
前言
串口通信(Serial Communications)的概念非常简单,串口按位(bit)发送和接收字节。尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。本文主要接收使用串口发送接收数据,波特率设置,串口的基本时序等。
一、介绍部分
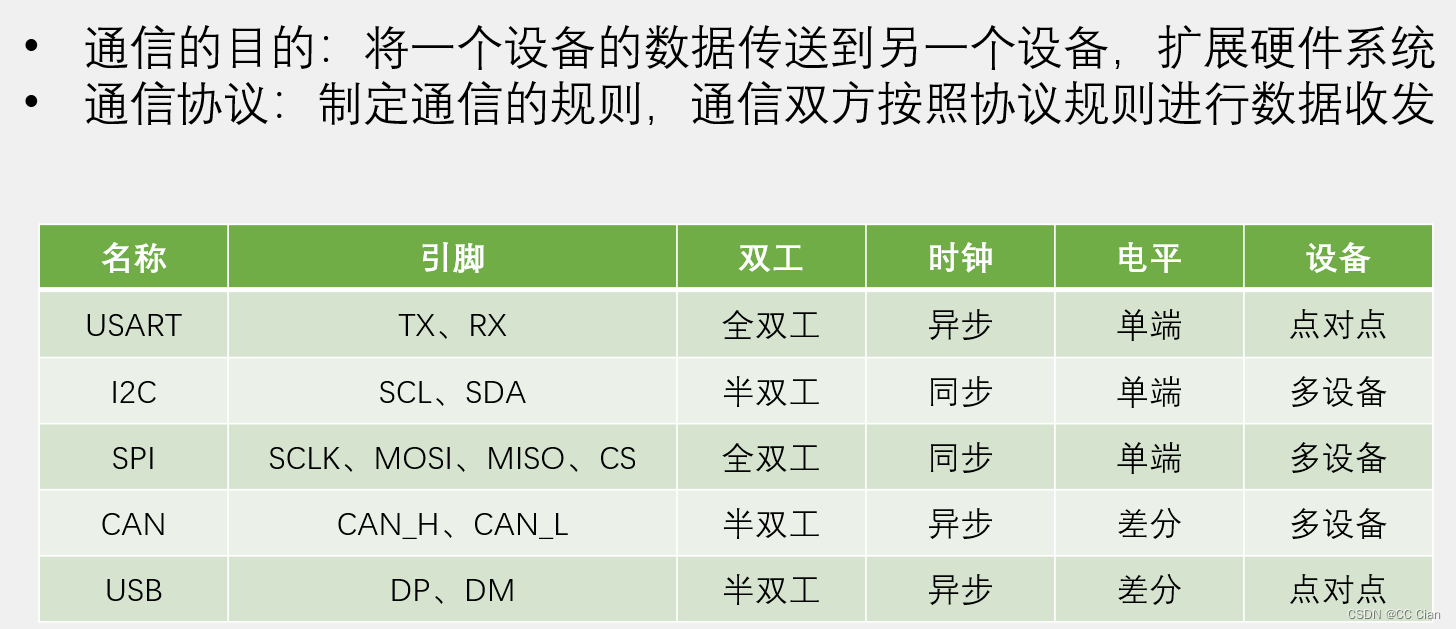
通信接口
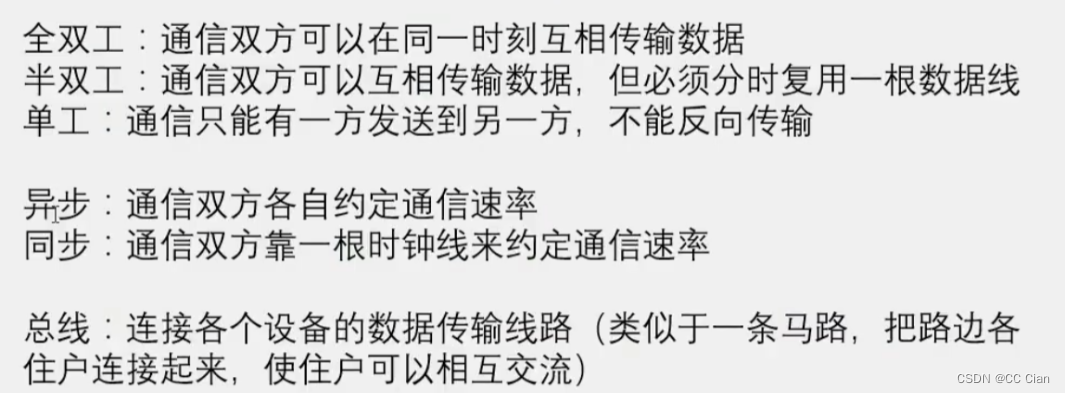
术语解释
串口通信简介

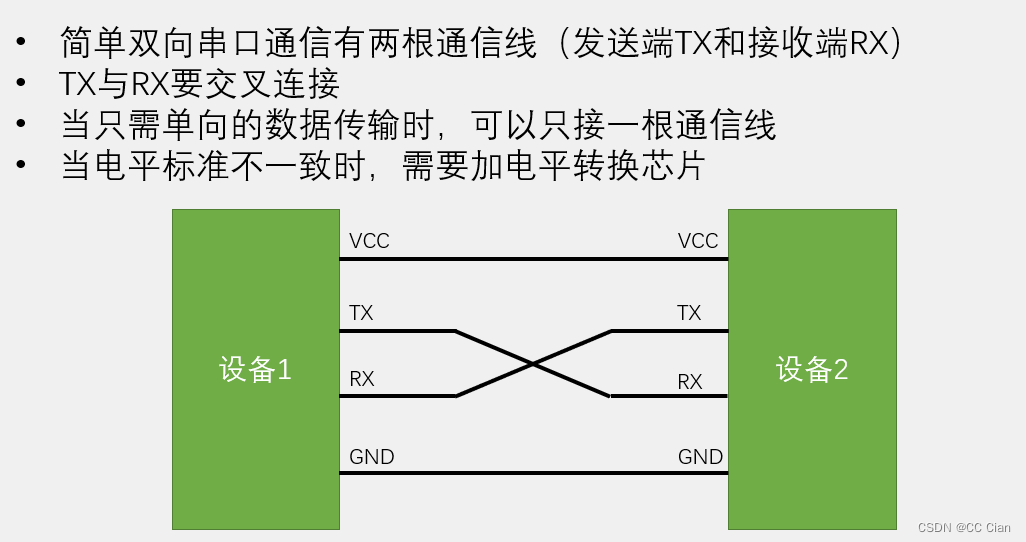
硬件电路
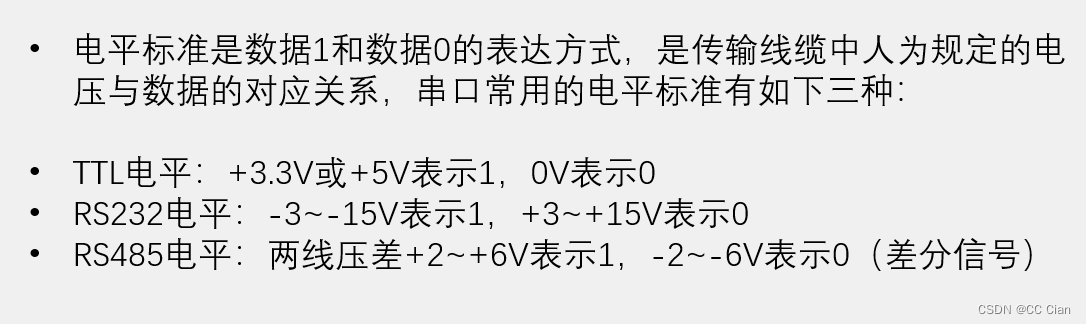
电平标准
串口参数
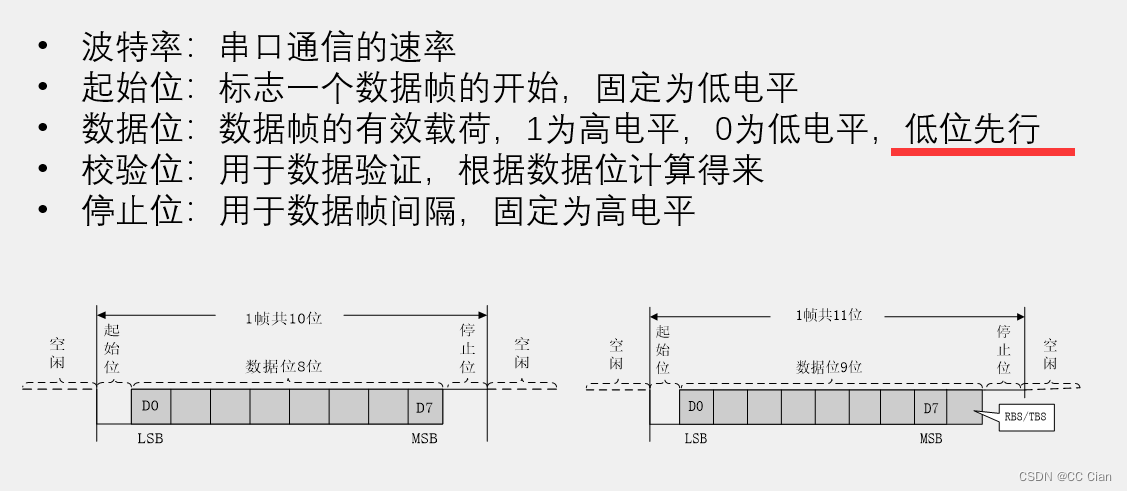
串口时序
USART简介
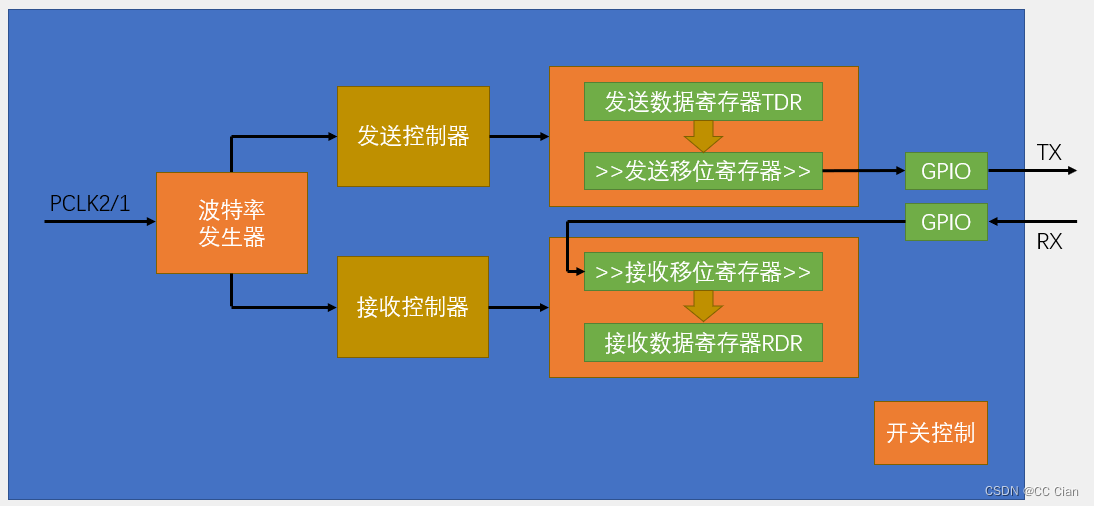
USART框图
USRAT基本结构
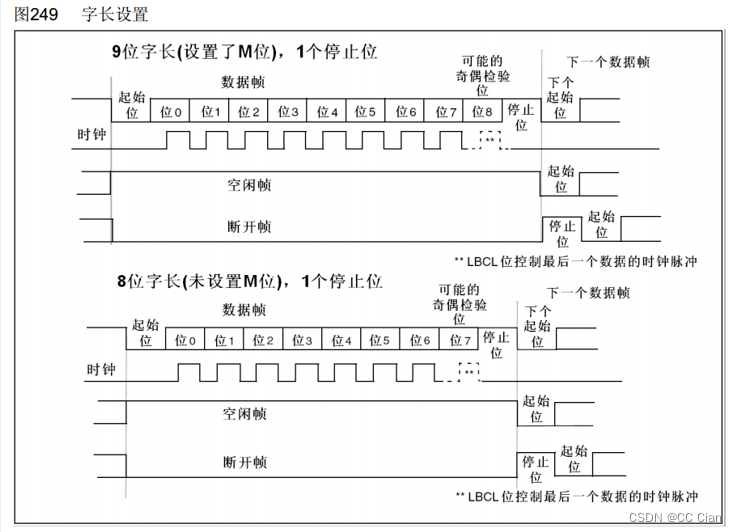
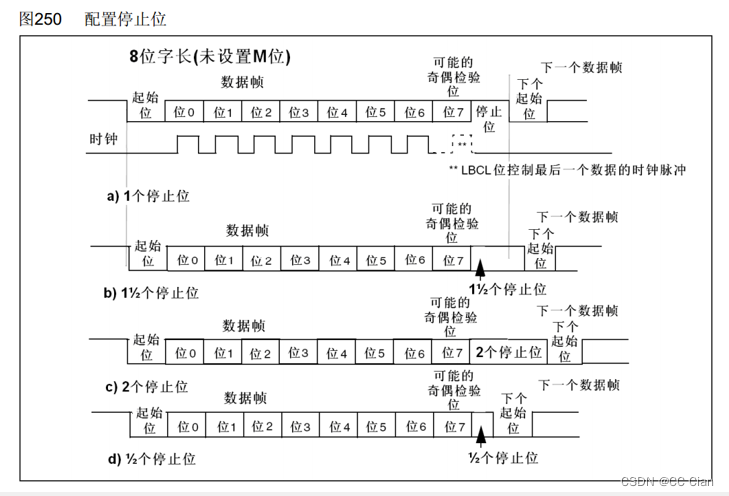
数据帧
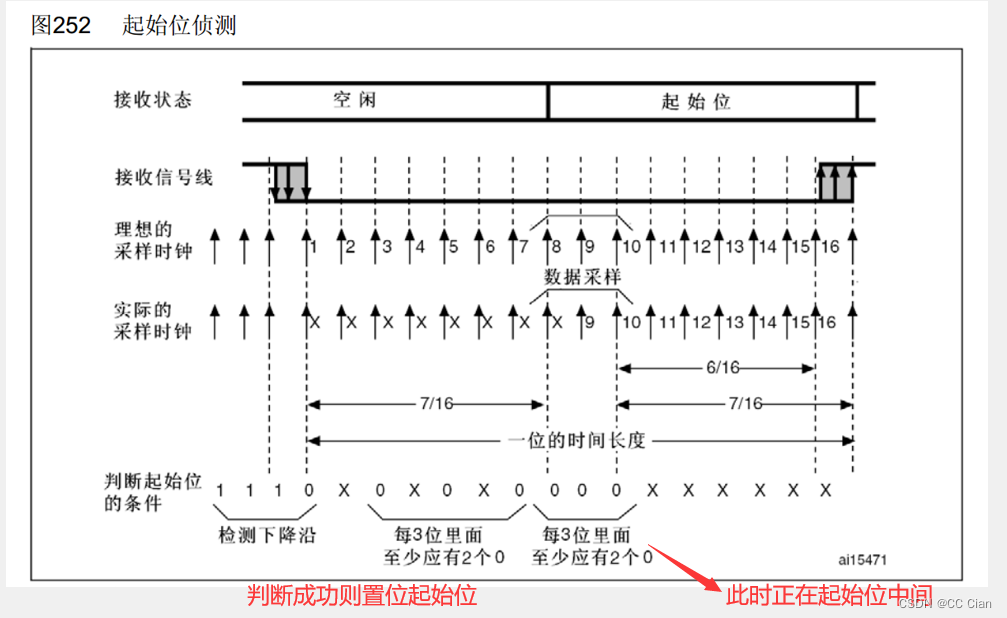
起始位检测
在受到噪声影响后,采用2:1策略,选择更多的作为所接收到的数据,并使噪声标志位NE置1

波特率发生器


CH340G

二、实例部分
使用USART1来作为例子,根据引脚定义,选择正确的接口

使用串口发送数据
接线图

代码实现
配置串口Serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>void Serial_Init(void){// 开启时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// 初始化引脚,发送数据引脚GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // A9GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 50Hz翻转速度GPIO_Init(GPIOA, &GPIO_InitStructure);// 初始化串口配置USART_InitTypeDef USART_InitStructure;USART_InitStructure.USART_BaudRate = 9600; // 串口波特率USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 不使用流控USART_InitStructure.USART_Mode = USART_Mode_Tx; // 串口模式,发送USART_InitStructure.USART_Parity = USART_Parity_No; // 无校验USART_InitStructure.USART_StopBits = USART_StopBits_1; // 选择一位停止位USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 不需要校验位,八位字长USART_Init(USART1,&USART_InitStructure);// USART1使能USART_Cmd(USART1,ENABLE);
}// 发送函数
void USART_SendByte(uint8_t Byte){USART_SendData(USART1,Byte);// 等待写入完成,写入完成之后会将标志位自动清0while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);
}// 发送数组函数
void USART_SendArray(uint8_t *Array,uint16_t Length){uint8_t i = 0;for(i=0;i<Length;i++){USART_SendData(USART1,Array[i]);// 等待写入完成,写入完成之后会将标志位自动清0while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);}
}// 发送字符串函数
void USART_SendString(uint8_t *String){uint8_t i = 0;for(i=0;String[i]!='\0';i++){USART_SendData(USART1,String[i]);// 等待写入完成,写入完成之后会将标志位自动清0while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);}
}// 返回X的Y次方
uint32_t Serial_Pow(uint32_t X,uint32_t Y){uint32_t Result = 1;while(Y--){Result *= X;}return Result;
}
// 发送数字函数
void USART_SendNum(uint32_t Num,uint16_t Length){uint8_t i = 0;for(i=0;i<Length;i++){USART_SendByte(Num / Serial_Pow(10,Length-i-1) % 10 + 0x30);// 等待写入完成,写入完成之后会将标志位自动清0while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);}
}//重定向fputc函数,fputc是printf函数的底层,printf通过不停的调用fputc来达到输出的效果
//重定向到串口
int fputc(int ch,FILE *f){USART_SendByte(ch);return ch;
}// 封装使用sprintf输出到串口
void Serial_Printf(char *format, ...)
{char String[100];va_list arg; // 可变参数列表va_start(arg, format); // 从format开始接收可变参数vsprintf(String, format, arg);va_end(arg);USART_SendString((uint8_t*)String);
}主函数main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"int main(void)
{OLED_Init();Serial_Init();//USART_SendByte();
// uint8_t Array[] = {0x41,0x42,0x43,0x44};
// USART_SendArray(Array,4);
// uint8_t String[] = {"hello world"};
// USART_SendString(String);
// USART_SendNum((uint32_t)12345,5);
// printf("Num = %d\r\n",666);
// char String[100];
// sprintf(String,"Num = %d\r\n",666);
// USART_SendString((uint8_t*)String);Serial_Printf("一程山水");while (1){}
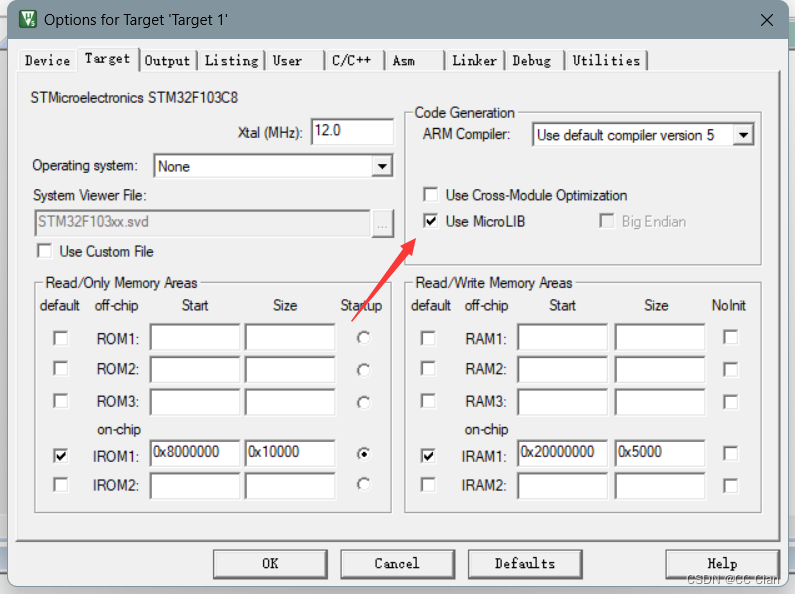
}重定向printf需要勾上Use MicroLIB
中文不乱码方法
- 代码与串口都使用utf8格式,并在如下图位置加上–no-multibyte-chars
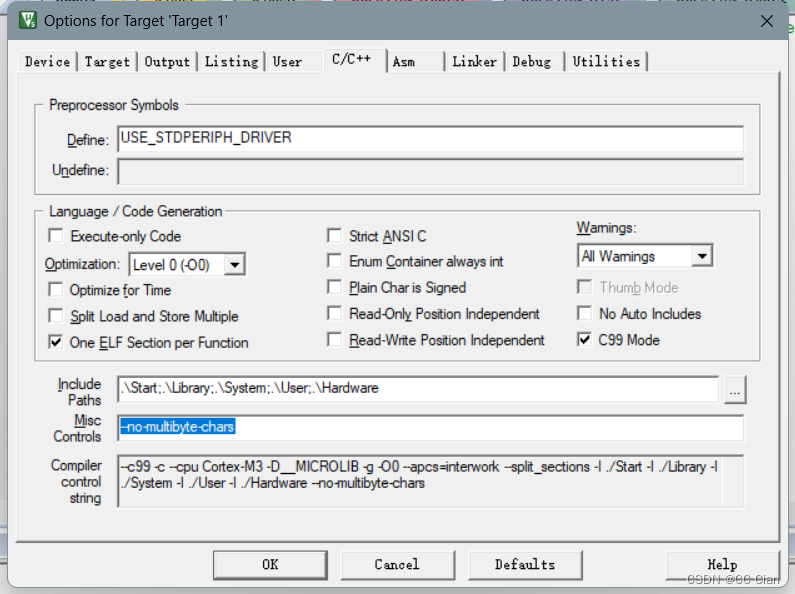
- 使用GB2312支持中文编码格式,串口使用GBK编码格式接收即可。
串口的发送与接收数据
线路连接与上面一致
代码实现
串口配置Serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>uint8_t RxData;
uint8_t RxFlag;void Serial_Init(void){// 开启时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// 初始化引脚GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // A9 发送数据GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 50Hz翻转速度GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; // A10 接收数据GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 50Hz翻转速度GPIO_Init(GPIOA, &GPIO_InitStructure);// 初始化串口配置USART_InitTypeDef USART_InitStructure;USART_InitStructure.USART_BaudRate = 9600; // 串口波特率USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 不使用流控USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; // 串口模式,发送+接收USART_InitStructure.USART_Parity = USART_Parity_No; // 无校验USART_InitStructure.USART_StopBits = USART_StopBits_1; // 选择一位停止位USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 不需要校验位,八位字长USART_Init(USART1,&USART_InitStructure);// 开启中断USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//初始化NVICNVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 分组NVIC_InitTypeDef NVIC_InitStructure;// 中断通道NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;// 中断通道使能NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;// 抢占优先级NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;// 响应优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);// USART1使能USART_Cmd(USART1,ENABLE);
}// 发送函数
void USART_SendByte(uint8_t Byte){USART_SendData(USART1,Byte);// 等待写入完成,写入完成之后会将标志位自动清0while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);
}// 发送数组函数
void USART_SendArray(uint8_t *Array,uint16_t Length){uint8_t i = 0;for(i=0;i<Length;i++){USART_SendData(USART1,Array[i]);// 等待写入完成,写入完成之后会将标志位自动清0while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);}
}// 发送字符串函数
void USART_SendString(uint8_t *String){uint8_t i = 0;for(i=0;String[i]!='\0';i++){USART_SendData(USART1,String[i]);// 等待写入完成,写入完成之后会将标志位自动清0while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);}
}// 返回X的Y次方
uint32_t Serial_Pow(uint32_t X,uint32_t Y){uint32_t Result = 1;while(Y--){Result *= X;}return Result;
}
// 发送数字函数
void USART_SendNum(uint32_t Num,uint16_t Length){uint8_t i = 0;for(i=0;i<Length;i++){USART_SendByte(Num / Serial_Pow(10,Length-i-1) % 10 + 0x30);// 等待写入完成,写入完成之后会将标志位自动清0while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);}
}//重定向fputc函数,fputc是printf函数的底层,printf通过不停的调用fputc来达到输出的效果
//重定向到串口
int fputc(int ch,FILE *f){USART_SendByte(ch);return ch;
}// 封装使用sprintf输出到串口
void Serial_Printf(char *format, ...)
{char String[100];va_list arg; // 可变参数列表va_start(arg, format); // 从format开始接收可变参数vsprintf(String, format, arg);va_end(arg);USART_SendString((uint8_t*)String);
}// 获取RxFlag
uint8_t USART_GetRxFlag(void){if(RxFlag == 1){RxFlag = 0;return 1;}return 0;
}// 获取RxData
uint8_t USART_GetRxData(void){return RxData;
}//中断函数
void USART1_IRQHandler(void){if(USART_GetITStatus(USART1,USART_IT_RXNE)==SET){RxData = USART_ReceiveData(USART1);RxFlag = 1;USART_ClearITPendingBit(USART1,USART_IT_RXNE);}
}主函数main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"uint8_t Serial_RxData;int main(void)
{OLED_Init();OLED_ShowString(1, 1, "RxData:");Serial_Init();while (1){if (USART_GetRxFlag() == 1){Serial_RxData = USART_GetRxData();USART_SendByte(Serial_RxData);OLED_ShowHexNum(1, 8, Serial_RxData, 2);}}
}这篇关于STM32串口通信(发送与接收数据)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






