本文主要是介绍JZ2440的NandFlash控制器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
【点此回顾上课学习内容]
芯片的型号:K9F2G08U0C
摘要: 本文以S3C2440为例来讲解NAND FLASH控制器的使用方法. 例程中故意将一部分代码放置到 nand 的4k 字节之后, 因无法自动拷贝到steppingstone, 所以需要读取nand中的内容到sdram, 本例程重点关注nand的初始化和读取.
1. 硬件部分:
1.1 简介:
- 芯片大小:256M Byte
- 记忆单元阵列:(256M + 8,192K)bit x 8bit
- 擦写次数比较少:10 万次
- 数据保留时间:10 年
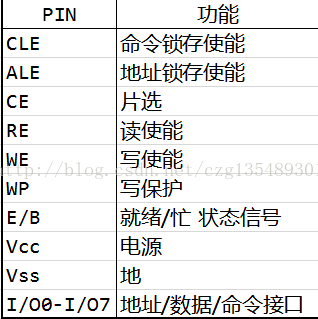
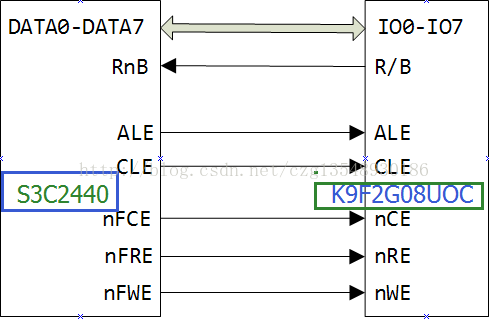
- 8个IO 口进行数据和地址的复用,因此,读写的时候要用到多个周期
引脚定义及接法
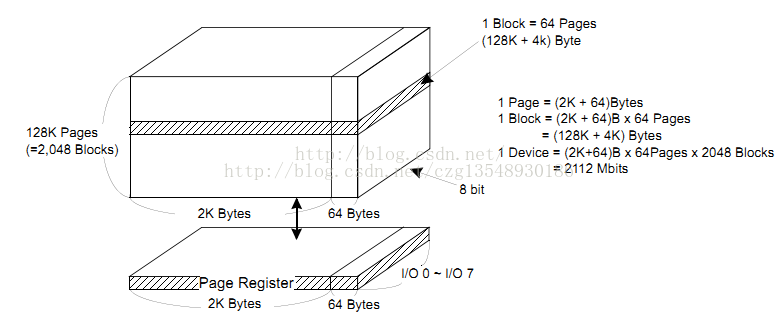
1.2 内部存储单元的组织结构:
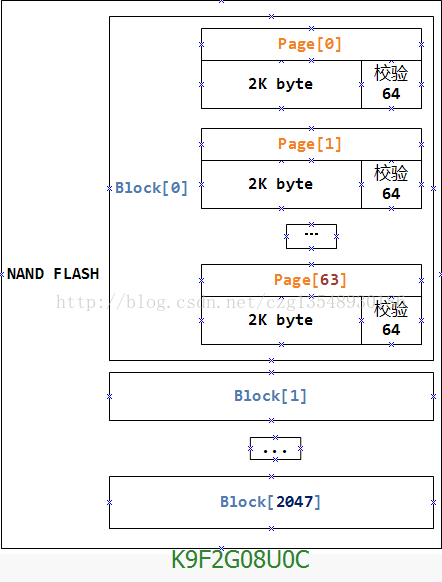
K9F2G08U0C共有2048个Block(块), 每个Block含有64 Page(页), 每个Page含有2k byte的正常存储空间以及64 byte的校验空间 .
总空间 = 2048 * 64 * (2 * 1024 + 64) byte = 264MB
实际存储空间 = 2048 * 64 * 2 * 1024 byte = 256MB
对 nandflash 的结构的几点说明:
- 一页中 1k 表示的是main 区(用于存储用户数据)容量,32 表示的是 spare 区(用于在读写操作的时候存放校验码)容量
- 块的大小一般是 128kb、256kb、512kb,貌似这里更小,是64kb
- 每个块里边包含很多页,老的 nandflash ,页大小是 256 Bytes、512Bytes,这类被称作 small block,地址周期只有 4 个。常见的nandflash,页大小多数是 2k Bytes,被称作 big block,地址周期 5 个,更新的 nandflash 页大小是 4k Bytes,这里的这个芯片,页大小是 2k Bytes,属于 big block。
- 这个芯片的写操作是以页为单位的,擦除是以块为单位的。
- 在一个块中,对每一页的编程必须是顺序的,比如,一个块中有128个页,那么你只能先对 Page0 编程,再对 Page1 编程 ...
- 为了能让 nandflash 作为启动介质,s3c2440 内部集成了4k 的 sram ,当从 nand 启动的时候,nandflash 代码的前 4k 空间会被赋值到 s3c2440 内部,然后从内部的 sram 开始启动。
- s3c2440 硬件产生 ECC 校验码。
1.3寻址方式:
NAND的读写的最小单位为Page:
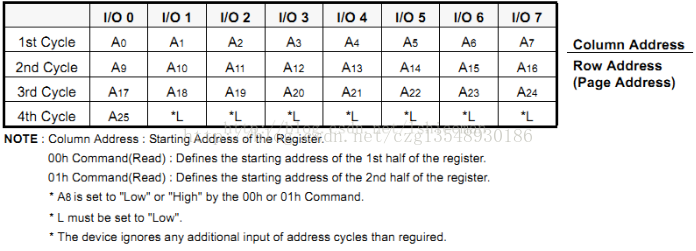
小页:
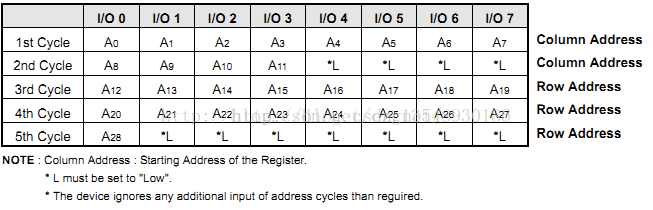
大页:(K9F2G08U0C共有2048个Block(块), 每个Block含有 64 Page(页),所以我们这款芯片为大页读写)
列地址: 进行 Block 和 Page 寻址
行地址: 进行 Page 内寻址
如何区分Nandflash读写是大页还是小页点我!
2. 软件部分:
由于 s3c2440 内部有nand 的控制器,去查看2440的数据手册,自己编写时序操作程序不是明智的选择,正确的方式是一步一步配置好 s3c2440 的 nandflash 控制器,然后对应查看K9F2G08U0C的芯片手册看是否符合要求!
在此以读Nandflash为例子来配置寄存器。
2.1 初始化部分:
设置好时序中的几个间隔时间:
从 s3c2440 芯片手册上可以知道:
图1:
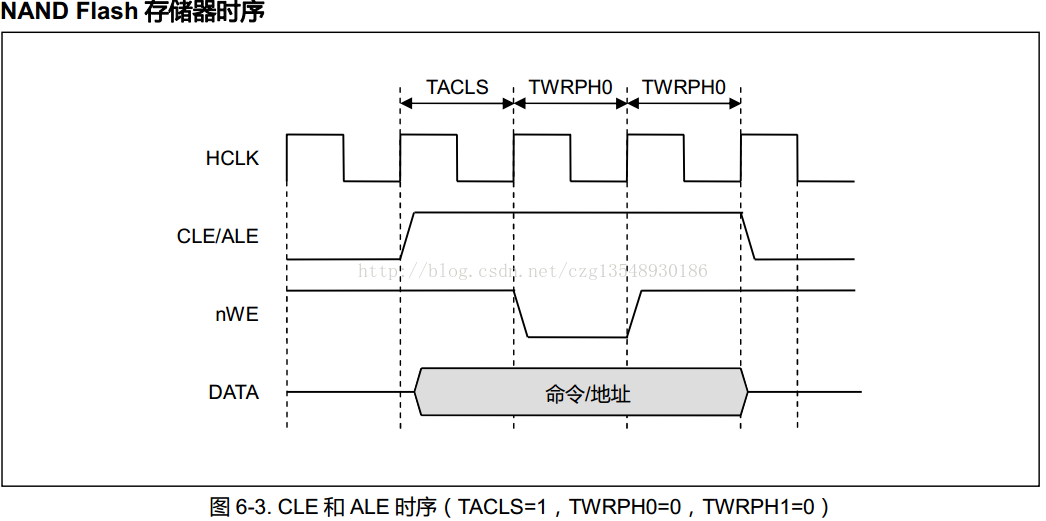
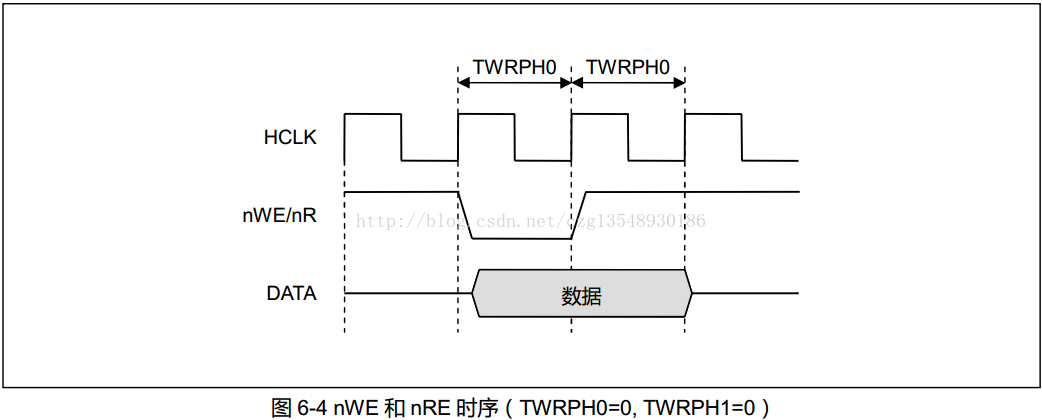 对于 CLE/ALE 上的时序,我们需要设置 TACLS,TWRPH0,TWRPH1,这几个都在 NFCONF 寄存器里。
对于 CLE/ALE 上的时序,我们需要设置 TACLS,TWRPH0,TWRPH1,这几个都在 NFCONF 寄存器里。
| 寄存器 | 地址 | R/W | 描述 | 复位值 |
| NFCONF | 0x4E000000 | R/W | Nandflash 的配置寄存器 | 0x0000100X |
| NFCONF | Bit | 描述 | 初始值 |
| Reserved | [15:14] | 保留 | - |
| TACLS | [13:12] | CLE & ALE duration setting value (0~3) Duration = HCLK x TACLS | 01 |
| ... | ... | ... | ... |
| TWRPH0 | [10:8] | TWRPH0 duration setting value (0~7) Duration = HCLK x ( TWRPH0 + 1 ) | 000 |
| ... | ... | ... | ... |
| TWRPH1 | [6:4] | TWRPH1 duration setting value (0~7) Duration = HCLK x ( TWRPH1 + 1 ) | 000 |
| 从这里之后的几个都是由硬件决定(就是上下拉)的不需要软件来管。 |
原理图中的这个地方设置的是上表中 TWRPH1 之后的位:

CCON = 1; // 支持 1k 字节或 2k 字字节每页的NAND flash存储器
GPG13 = 1; // 每页 2k 字节
GPG14 = 1; // 5个地址周期
GPG15 = 0; // 8位总线
要 求上边的 TACLS、TWRPH0、TWRPH1 的值:
- 我们假设 HCLK 为 最大值 136MHz ,稍作分析可得,我们实际的HCLK肯定要小很多,但是如果最大值满足那么小一点的HCLK肯定满足条件!则 HCLK 的周期是 1/136MHz = 7.4ns<flash时钟来自于HCLK后面讲时钟会提到>
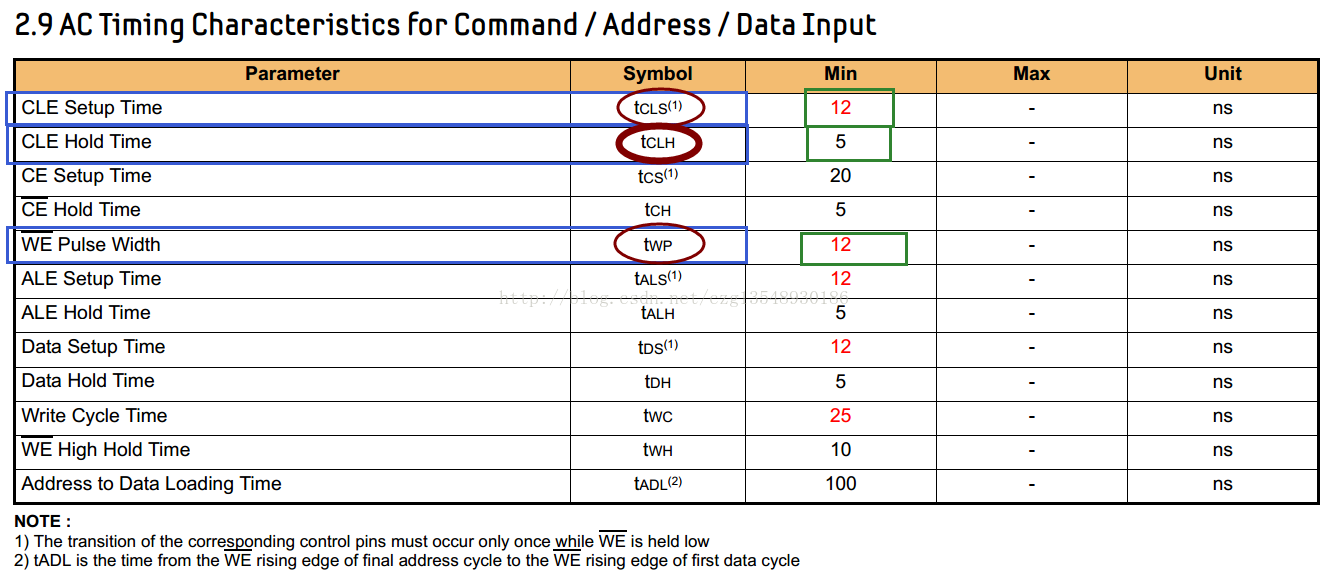
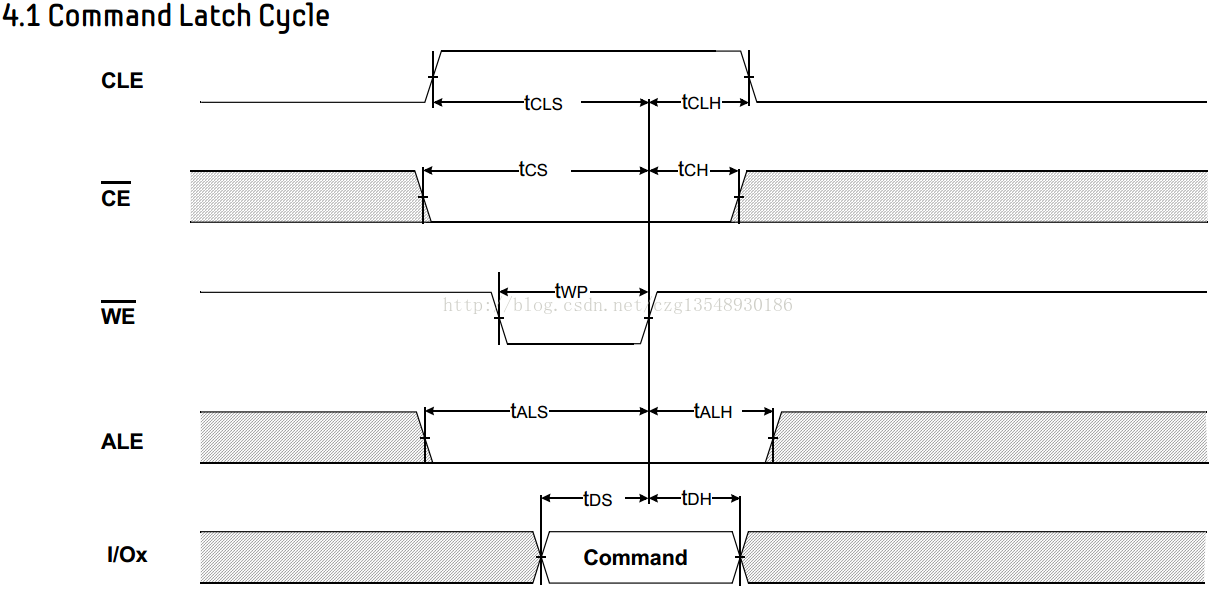
- 查看 nandflash 的数据手册,找到跟时间相关的时序图和时间:
时间表:
时序:
找一个跟上边红色数字 图1 中都有的一张时序图:
则
TACLS 时间是 tCLS -tWP,查 时间表 得到 12ns -12ns = 0ns
根据寄存器中描述的计算公式:Duration = HCLK x TACLS => 0ns = 7.4ns x TACLS => TACLS = 0
TWRPH0 的时间是 tWP ,查 时间表 得到 12ns
根据寄存器中描述的计算公式:Duration = HCLK x ( TWRPH0 + 1 ) => 12ns = 7.4ns x (TWRPH0 + 1) => TWRPH0 = 1.6 ,由于他的取值范围是 (0~7) ,并且,时间表中的时间是最小能识别的时间,那我们取TWRPH0 =3
TWRPH1 的时间是 tclh = 5ns
根据寄存器中描述的计算公式:Duration = HCLK x ( TWRPH1 + 1 ) => 5ns = 7.4ns x (TWRPH1 + 1) => TWRPH1 = 0 即定能满足
- #define NFCONF (*((volatile unsigned long *)0x4E000000))
-
- void nand_init(void )
- {
- #define TACLS 0
- #define TWRPH0 3
- #define TWRPH1 0
-
-
- NFCONF = (TACLS<<12)|(TWRPH0<<8)|(TWRPH1<<4);
-
- NFCONT = (1<<4)|(1<<1)|(1<<0);
- }
2.2 芯片的选择和禁止(让芯片操作 CE 引脚):
- #define NFCONT (*((volatile unsigned long *)0x4E000004))
-
- void nand_select(void )
- {
- NFCONT &= ~(1<<1);
- }
-
- void nand_deselect(void )
- {
- NFCONT |= (1<<1);
- }
2.3 写命令和写地址:
-
- #define NFCMMD (*((volatile unsigned char *)0x4E000008))
-
- void nand_cmd(unsigned char cmd)
- {
- volatile int i;
- NFCMMD = cmd;
- for (i = 0; i<10; i++);
- }
- (大页)
- #define NFADDR (*((volatile unsigned char *)0x4E00000C))
- #define NAND_SECTOR_SIZE 2048
- #define NAND_BLOCK_MASK (NAND_SECTOR_SIZE_LP - 1)
-
- void nand_addr(unsigned int addr)
- {
-
-
- col = addr & NAND_BLOCK_MASK;
- page = addr / NAND_SECTOR_SIZE;
- volatile int i;
- NFADDR = col & 0xff;
- for (i = 0; i<10; i++);
- NFADDR = (col>>8) & 0x0f;
- for (i = 0; i<10; i++);
- NFADDR = page & 0xff;
- for (i = 0; i<10; i++);
- NFADDR = (page>>8) & 0xff;
- for (i = 0; i<10; i++);
- NFADDR = (page>>16) & 0x03;
- for (i = 0; i<10; i++);
- }
对程序的解释:
flash芯片的手册上有对于大页 flash 的访问 各个周期传递的位:
因此上边的命令 NFADDR = ... 就不难理解了。
至于,各个周期间的延时:
从flash芯片的数据手册上知道:
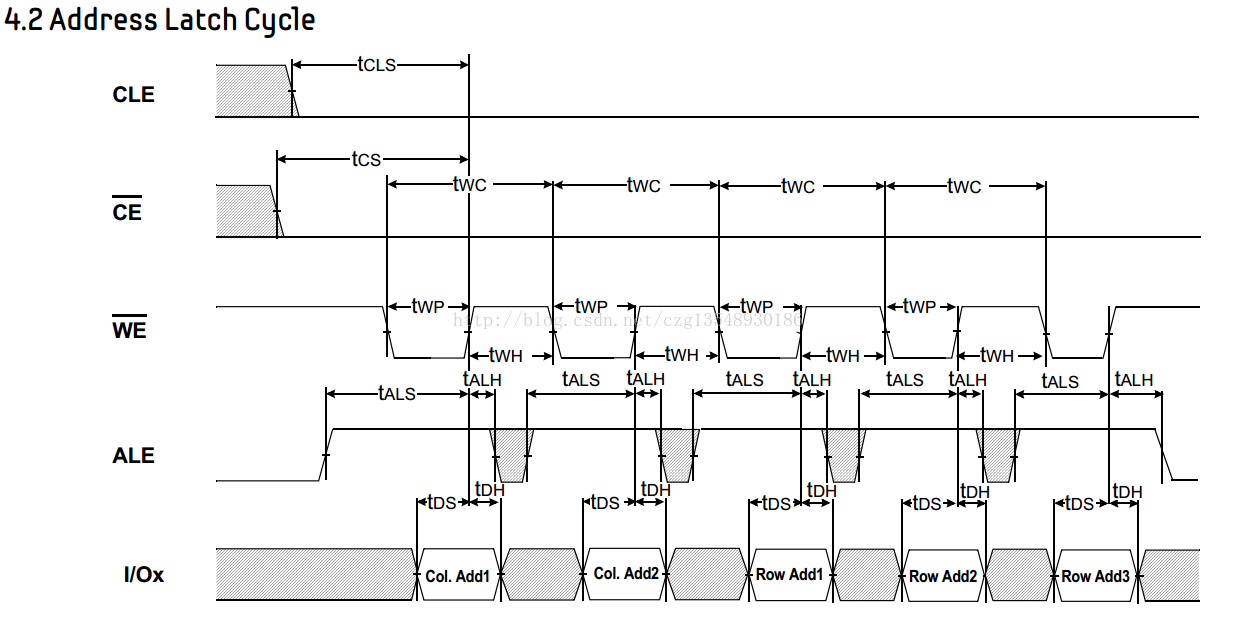
对于 I/O 引脚上的数据进行采集是在 WE 的上升沿进行的,因此, 每两个周期的间隔至少应该大于一个 tDS = 12ns,而对 flash 他的时钟来自 HCLK =136MHz,即使是单周期指令,也要 1/136MHz=7.4ns,因此,要延时一段时间。
2.4 读数据:
flash 芯片上:
flash 芯片上:
- #define NFSTAT (*((volatile unsigned char *)0x4E000020))
- #define NFDATA (*((volatile unsigned char *)0x4E000010))
- void nand_wait_teady(void)
- {
- while(!(NFSTAT & 1))
- for(i = 0; i < 10; i++);
- }
-
- unsigned char nand_data(void)
- {
- return NFDATA;
- }
-
-
-
- void nand_read(unsignedchar* buf, unsignedlong start_addr, int size)
- {
- int i,j;
- if((start_addr & NAND_BLOCK_MASK) || (size & NAND_BLOCK_MASK)){
- return;
- }
-
- nand_select_chip(); //选中芯片
-
- for(i=start_addr; i < (start_addr + size);)
- {
- write_cmd(0x00);
- write_addr(i);
- write_cmd(0x30);
- nand_wait_ready();
-
- for(j=0; j < NAND_SECTOR_SIZE; j++,i++)
- {
- *buf = read_data();
- buf++;
- }
- }
- nand_deselect_ship();
- return ;
- }
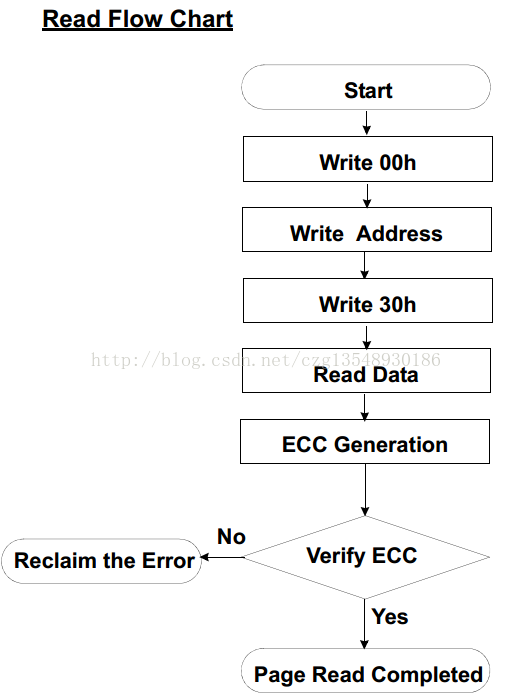
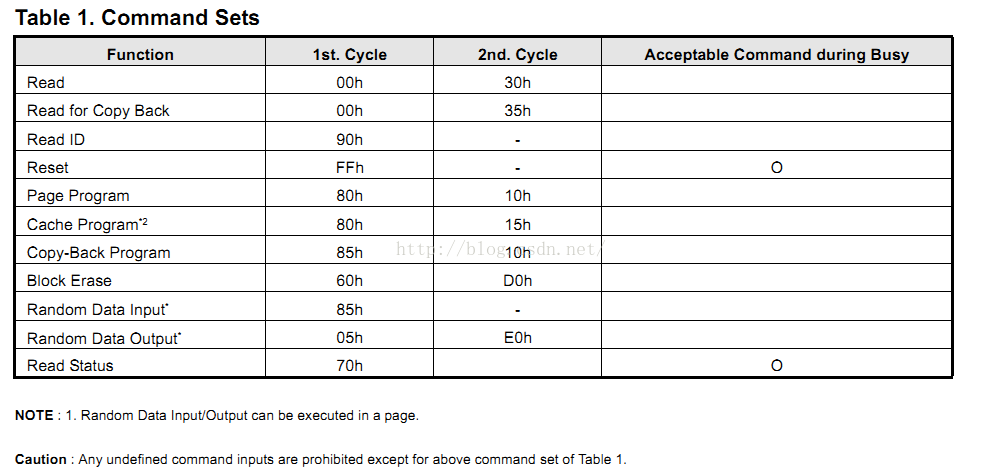
总结一下:
(1)选中芯片
(2)发送00h
(3)发出地址
(4)发30h
(5)等待就绪
(6)读一页数据
2.5 复位 flash 芯片:
知道了上边的命令的表格,那 复位的实现也就简单了:
- void nand_reset(void)
- {
- nand_select_chip();
- write_cmd(0xff);
- nand_wait_ready();
- nand_deselect_chip();
- }
3.NandFlash操作实例
篇幅有限,点击跳转NandFlash 控制器操作实例:读Flash
这篇关于JZ2440的NandFlash控制器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!