本文主要是介绍BMS 产品功能和详细设计规格,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1. 目的
- 1.1 引用文件
- 1.2 符号和缩写
- 2. 系统模块
- 2.1 Block Diagram
- 2.2 BMS功能参数
- 2.3 锂电池组功能参数
- 2.4 锂电池组SOC_OCV参数
- 2.5 锂电池组SOP参数
- 3 状态图和流程图
- 3.1 单机BMS状态转移图
- 3.2 Wakeup & Sleep
- 3.2.1 休眠策略(以下条件均满足并维持6秒):
- 3.2.2 唤醒策略
- 3.2.3 流程图
- 3.3 单机BMS ID确认机制
- 3.4 Discharge
- 3.4.1 流程图
- 3.5 并机决策策略
- 3.5.1 并机BMS状态迁移图
- 3.5.2 并机BMS ID确认机制
- 3.5.3 并机放电决策流程图
- 3.5.4 并机充电决策流程图
- 3.6 故障处理及分级策略
- 3.6.1 充电故障保护与恢复功能
- 3.6.2 放电故障保护与恢复功能
- 3.6.3 通用故障保护与恢复功能
- 4. 技术规格
- 4.1 CAN 通讯
- 4.2 Bootloader 更新方式
- 4.2.1 接口和参数
- 4.2.1.1 通讯接口
- 4.2.1.2 传输层参数
- 4.2.1.3 应用层参数
- 4.2.2 Bootloader流程图
1. 目的
此文件定义了BMS的产品功能和设计细部规格.
所有的产品设计,功能逻辑,作动流程,规格参数 均以此文件作为标准.
若此文件和客户的原始需求书产生背离, 则以客户规格书为标准.
在产品样品交付前, 此文件应以正式渠道告知客户, 由客户确认规格的正确性.
在产品样品交付前, 此文件应搭配功能E表以正式渠道告知客户, 作为样品的功能交付确认书.
1.1 引用文件
1.2 符号和缩写
ECU 电子控制单元
VCU 车身控制单元
IO 输入输出
CAN 控制局域网络
UART 通用异步收发传输
SPI 同步串行收发传输
PWM 脉冲宽度调制
BMS 电池管理系统
Bootloader 程序引导和更新
OCD 电流过放
AFE 前端模拟测量保护电路
SOC 电池荷电状态
SOH 电池健康状态
SOP 电池功率承受能力
2. 系统模块
根据 BMS 的产品功能,设计整个电源系统,该电源系统包含一组或两组BMS,两组BMS可单机运行亦可并联运行。
此BMS之组成主要是由微控制器单元, 通讯单元(CAN通讯、RS485通讯), 储存单元, 时钟单元, 电池监控单元, 电流采样单元, 电源管理单元, MOSFET开关单元与MOSFET驱动单元组成。
BMS的主要功能为:
- ECU间的信号传导.
- 锂电池组充放电控制.
- 锂电池组故障侦测,记录和恢复.
- 锂电池组安全性能管控.
- 锂电池组自身信息采集.
2.1 Block Diagram
图1定义为单机BMS 的系统框图:
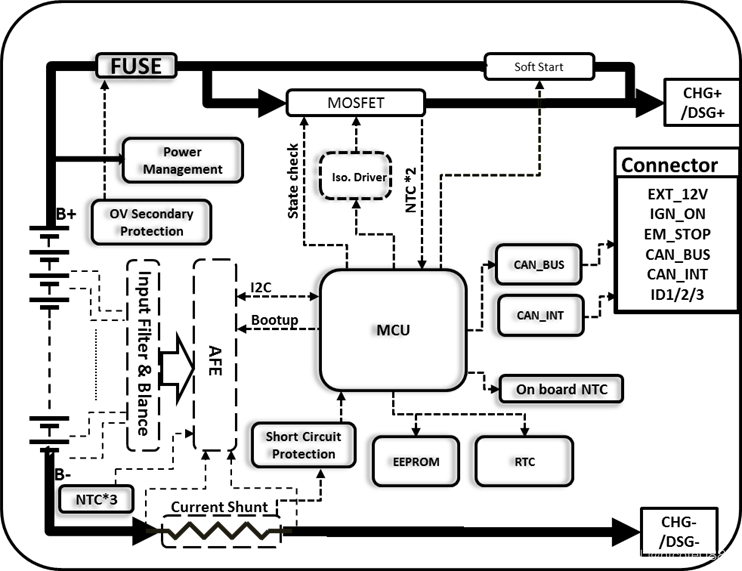
图2定义为并联BMS 的系统框图:
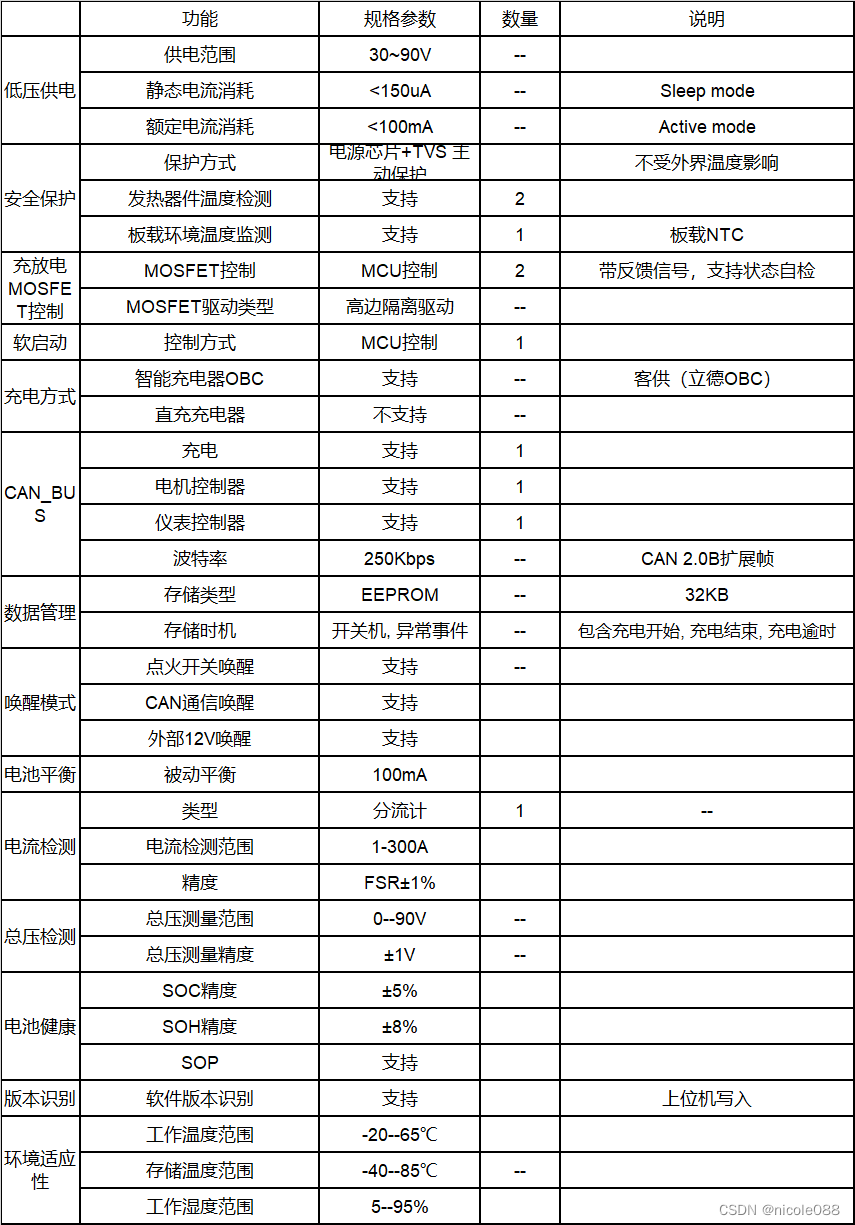
2.2 BMS功能参数
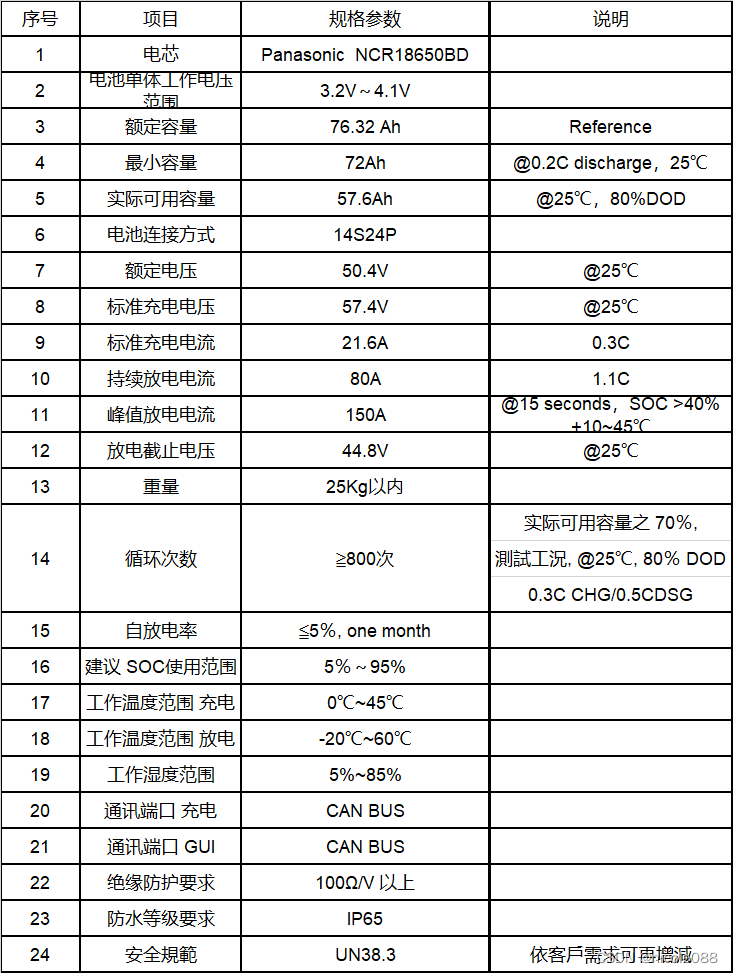
2.3 锂电池组功能参数
2.4 锂电池组SOC_OCV参数
根据2.3节锂电池组功能参数,至极动能使用放电实验法通过实际测量电芯性能对电芯容量进行静态标定,具体标定结果如表所示。

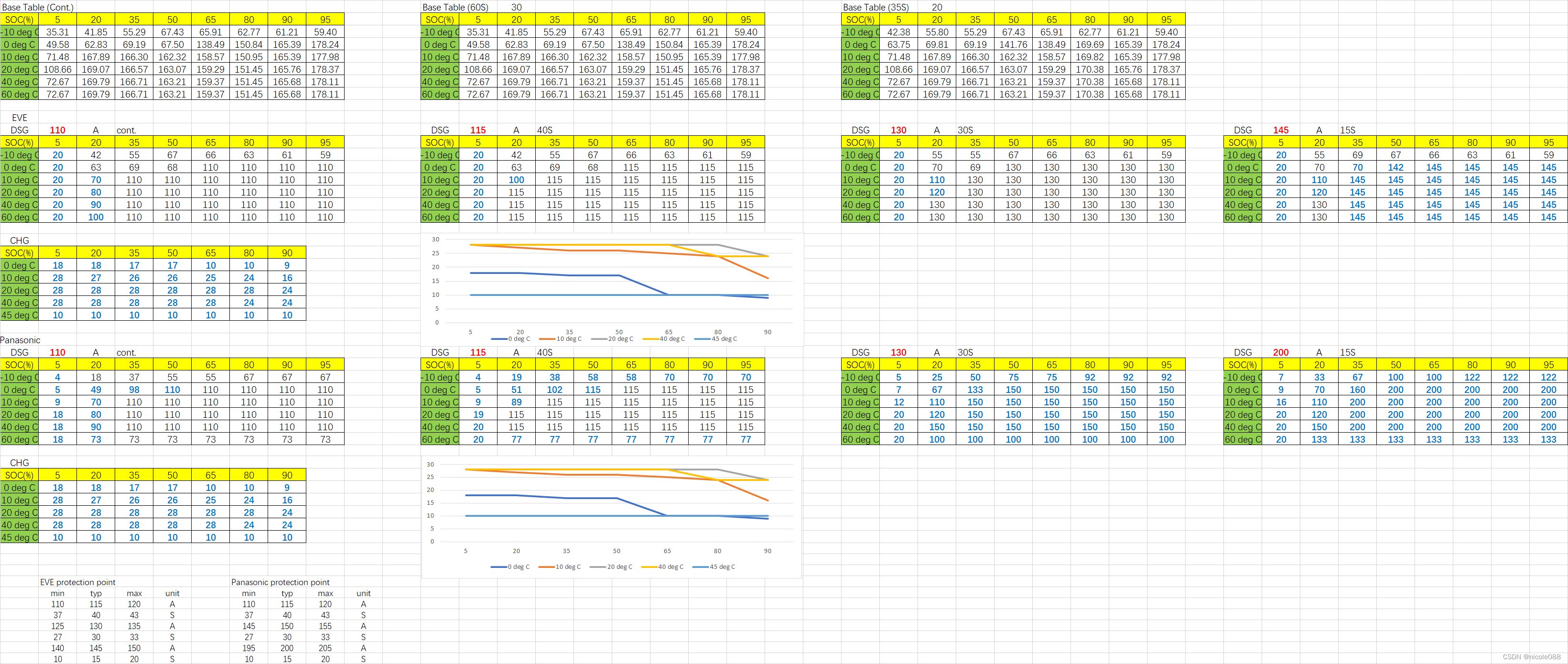
2.5 锂电池组SOP参数
根据2.3节锂电池组功能参数,至极动能参考电芯规格书设计电池组SOP表,具体结果如表所示。
3 状态图和流程图
3.1 单机BMS状态转移图
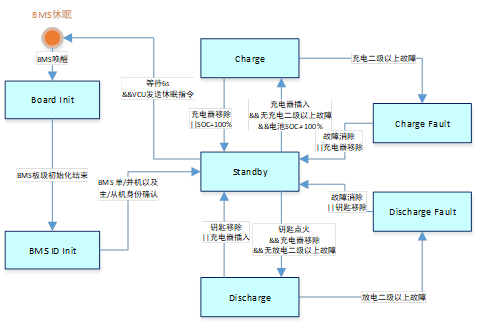
Note:电池处于Charge状态下,闭合充电开关,充电器可以对电池进行充电;电池处于Discharge状态下,闭合放电开关,电池有大电输出,对整车其他ECU供电;除Charge以及Discharge以外的其他状态,电池充电和放电开关均打开,无法对电池进行充电,且电池无输出。
3.2 Wakeup & Sleep
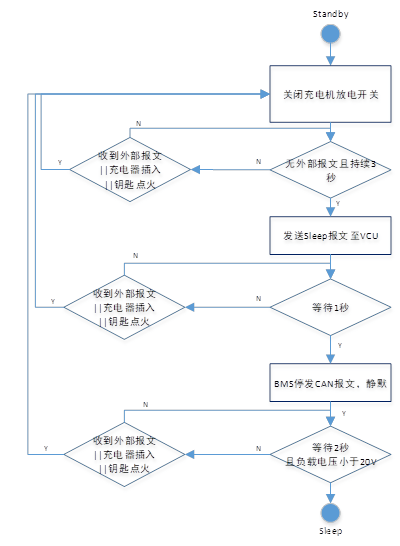
3.2.1 休眠策略(以下条件均满足并维持6秒):
当以下条件均满足时,BMS从Standby状态跳入休眠状态:
[1] 无钥匙信号;
[2] 无充电器插入信号;
[3] 无外部通讯信号;
[4] [1][2][3]条件均满足且维持6秒;
3.2.2 唤醒策略
当以下条件任一满足,BMS从休眠状态唤醒进入:
[1] 存在钥匙信号;
[2] 充电器插入;
3.2.3 流程图
3.3 单机BMS ID确认机制
BMS上电后通过内部CAN网络确认此时整个电源系统内部BMS 数量,若1.5秒内确认只有一组BMS,那此时BMS认为此时自身状态为主机并且为单机运行,向VCU汇报内CAN丢失警告。
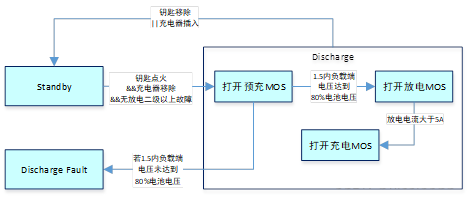
3.4 Discharge
若BMS检测到外部钥匙信号,BMS进入放入流程。当以下条件均满足时,BMS由standby状态跳入Discharge状态:
[1]. 钥匙Key_ON;
[2]. 充电器拔出;
[3]. 无放电二级以上故障(具体放电故障列表如8.2所示);
退出放电策略(以下条件任一满足):
[1]. 钥匙Key_OFF;
[2]. 充电器插入;
[3]. 存在充电故障(具体充电故障列表如8.1所示);
3.4.1 流程图
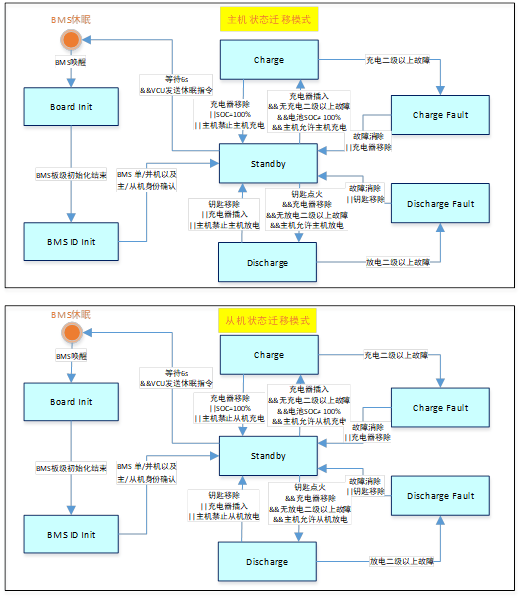
3.5 并机决策策略
3.5.1 并机BMS状态迁移图
3.5.2 并机BMS ID确认机制
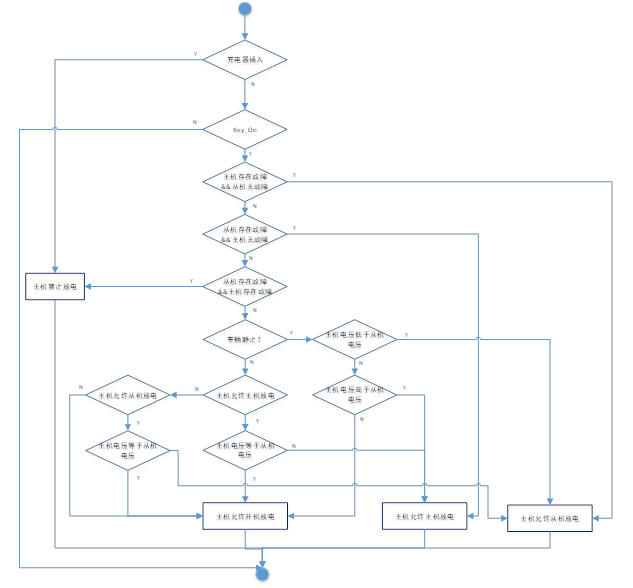
3.5.3 并机放电决策流程图
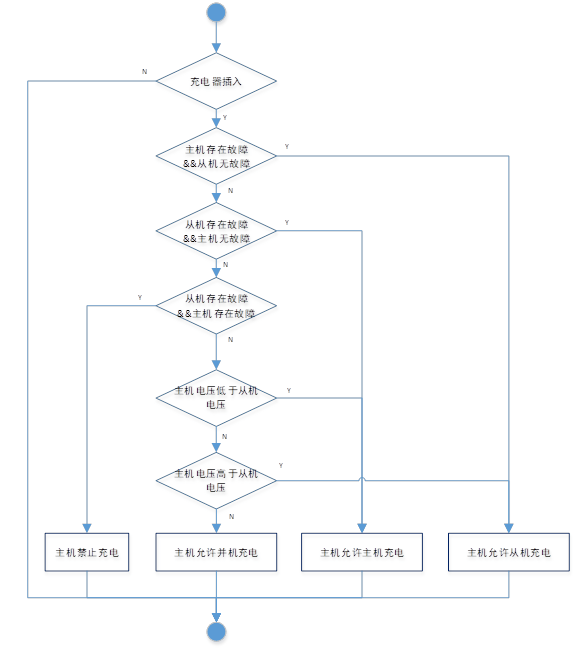
3.5.4 并机充电决策流程图
3.6 故障处理及分级策略
BMS故障分为3类:充电故障,放电故障以及通用故障。当发生充电故障时,BMS不可充电,但是可以放电;当发生放电故障时,BMS不可以放电,但是可以充电;当发生通用故障,BMS不可以充电同时不可以放电。
BMS拥有三级告警,故障级别定义如下: 3级告警为最严重告警,BMS故障不可自动恢复,BMS断开相应的继电器;2级告警为普通报警,可自动恢复,BMS断开相应的继电器;1级告警严重级别最低。
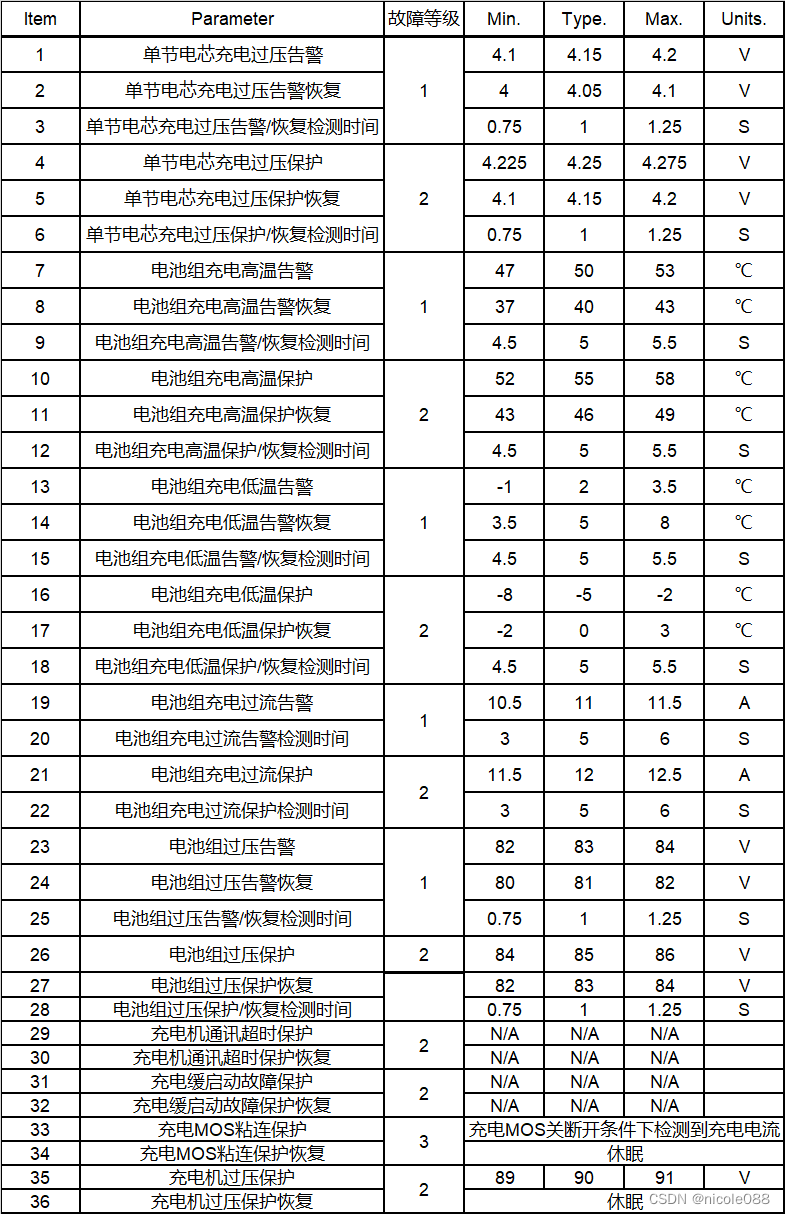
3.6.1 充电故障保护与恢复功能
当满足充电告警门限并且持续时间大于告警延时后,上报充电告警,具体故障阈值如下表:
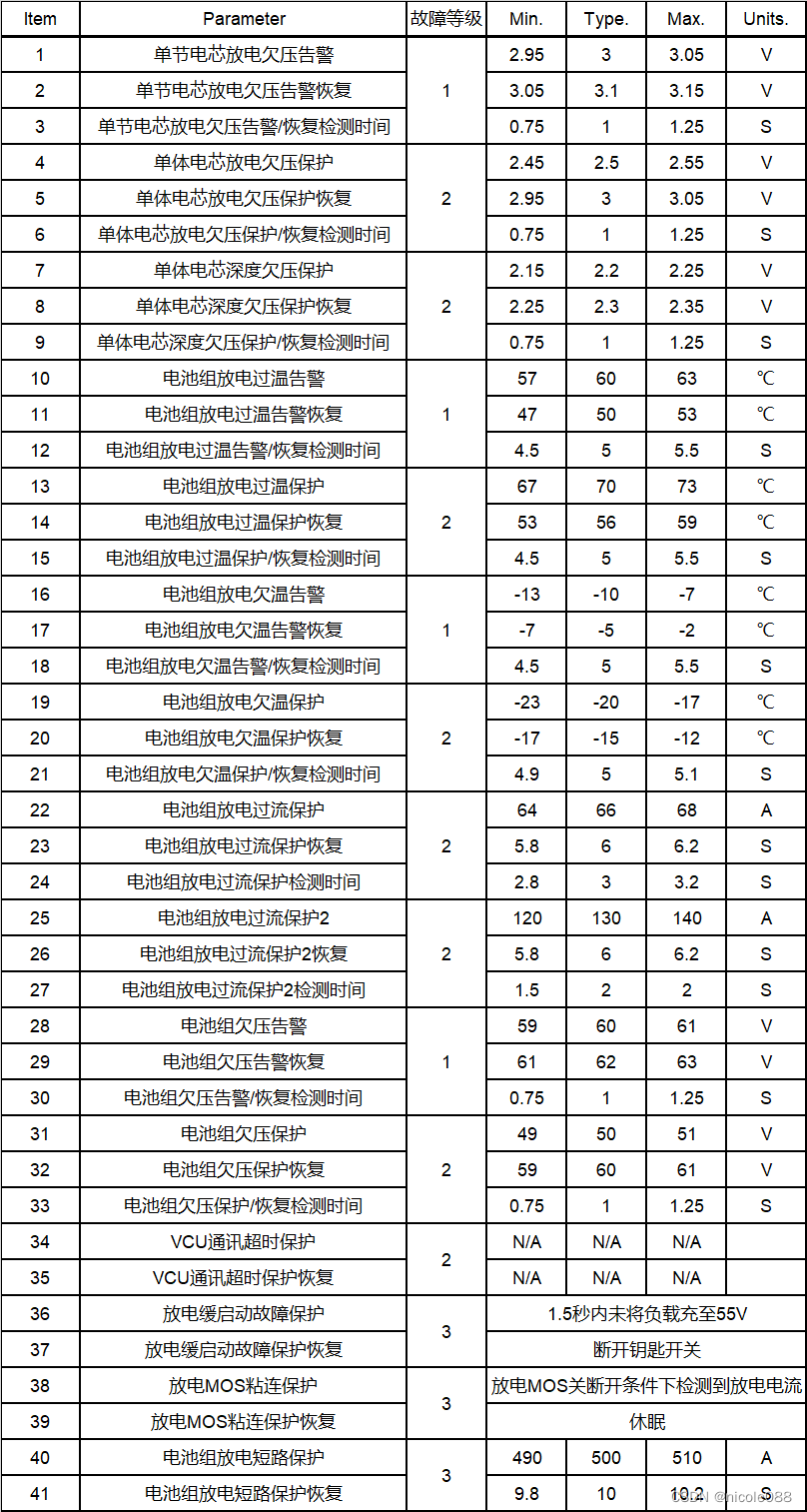
3.6.2 放电故障保护与恢复功能
当满足放电告警门限并且持续时间大于告警延时后,上报放电告警,具体故障阈值如下表:
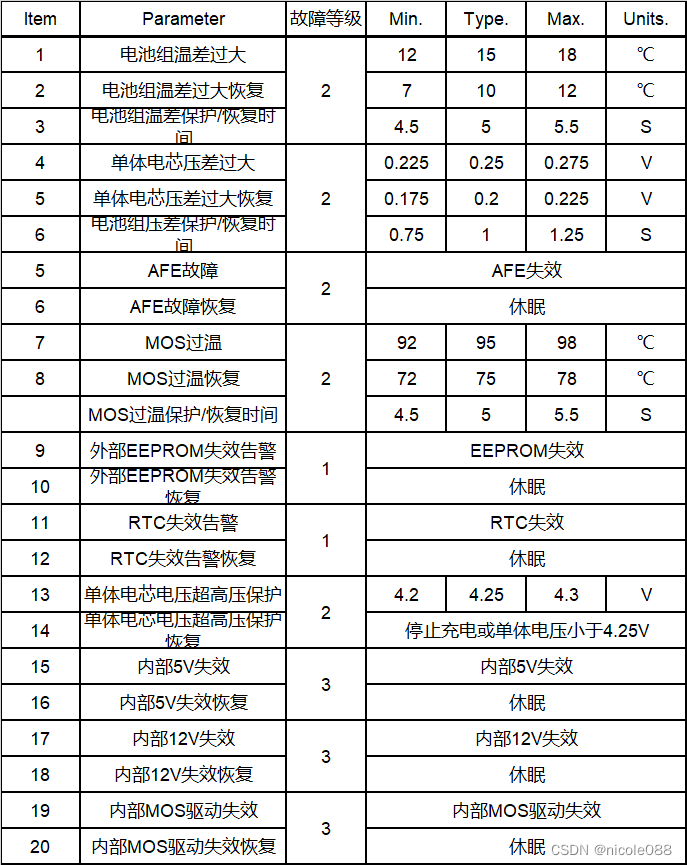
3.6.3 通用故障保护与恢复功能
当满足通用告警门限并且持续时间大于告警延时后,上报通用告警,具体故障阈值如下表:
4. 技术规格
4.1 CAN 通讯
系统通讯节点包括:BMS,充电机。
系统通讯采用CAN通讯协议。
速率: CAN1 : 125Kbit/s ; CAN2 :500Kbit/s。
CAN Bus-Off恢复机制: 禁止自动动恢复, 手动恢复 1s 尝试恢复 1次.
上电后第一帧CAN报文发送时间 ≤ 300m
4.2 Bootloader 更新方式
4.2.1 接口和参数
4.2.1.1 通讯接口
硬件接口: CAN
通讯速率: 125Kbit/s
Physical Address: 0x7D0
Functional Address: 0x7DF
Response Address: 0x7D8
数据校验方式: CRC32
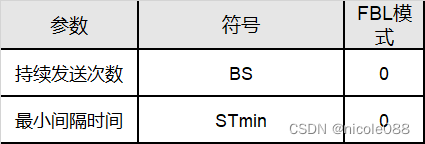
4.2.1.2 传输层参数
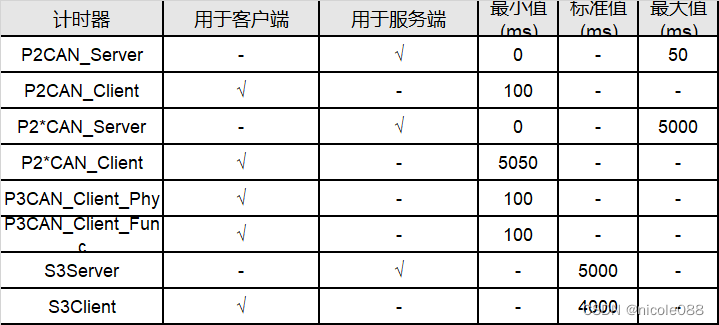
4.2.1.3 应用层参数
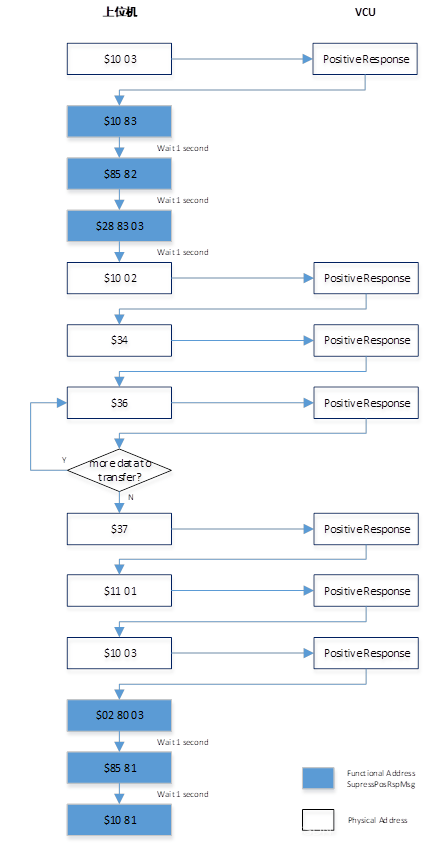
4.2.2 Bootloader流程图
这篇关于BMS 产品功能和详细设计规格的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






