本文主要是介绍DJI AIR 2S,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、注意事项
注意:
1、侧飞时需注意,没有侧向避障;夜间飞行需注意,没有视觉避障功能
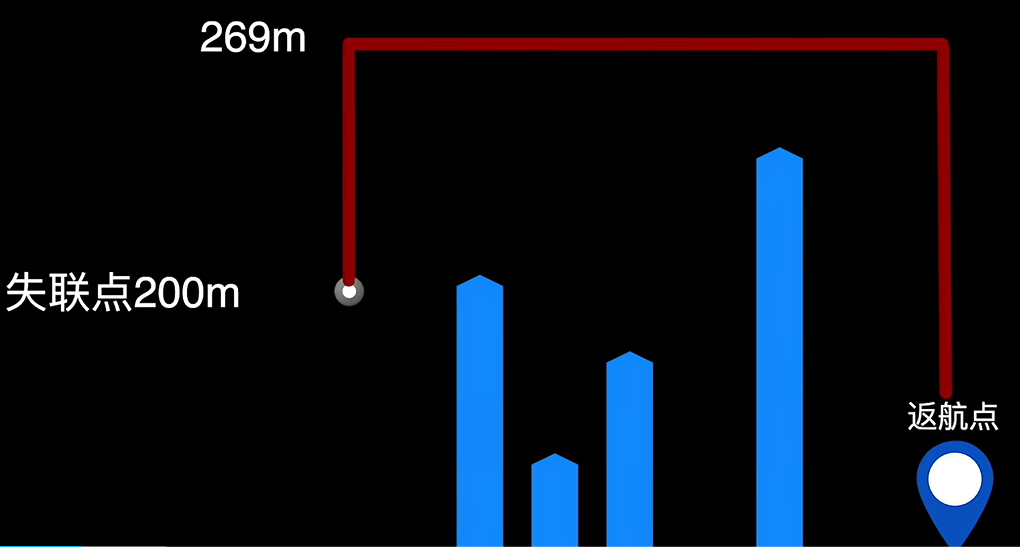
2、返航高度设置,应高于飞行区域高楼高度(如269m)
- 长按:自动返航
- 短按:在智能返航过程中,短按取消自动返航(飞行器在空中飞行时,直接短按,飞行器会空中紧急悬停)
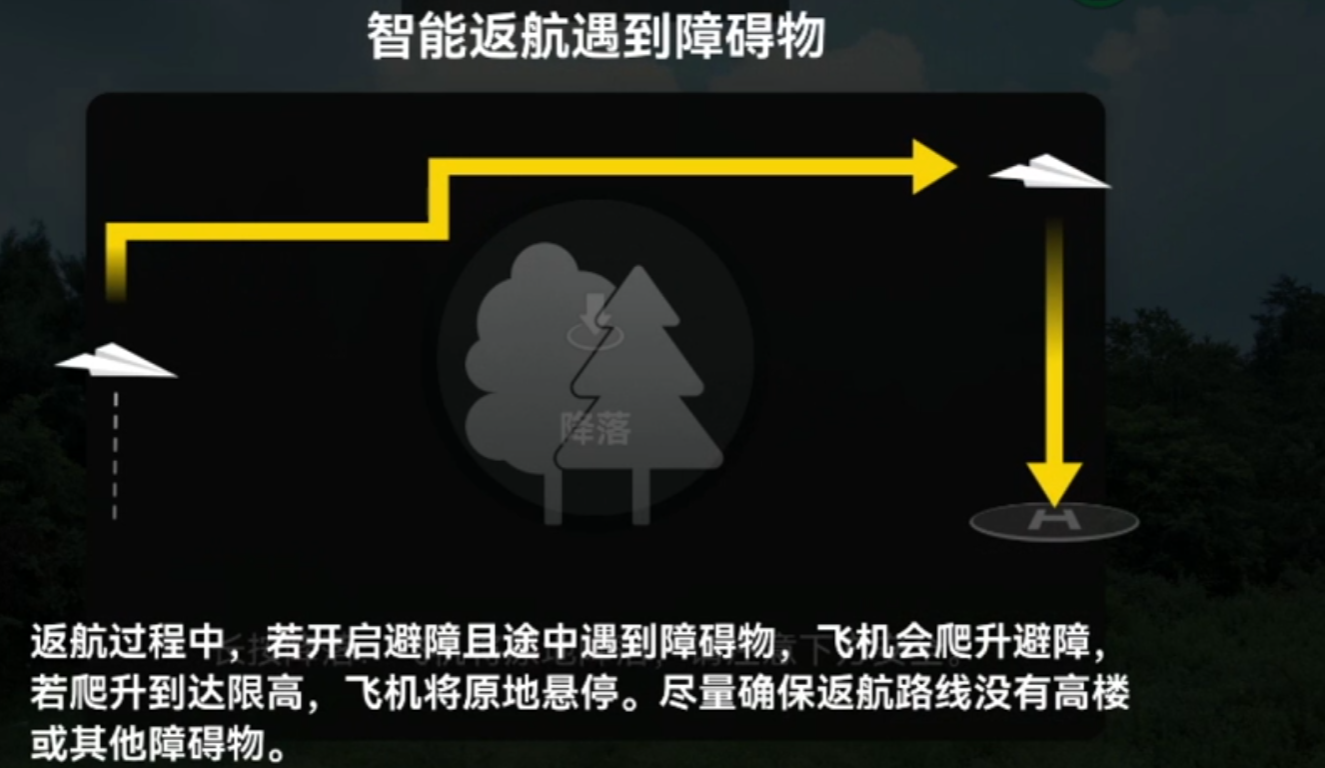
- 小于50m,直接当前高度直线返航(需注意周围物体高度小于飞机高度)
- 大于50m,飞机将会上升一定高度,再直线返航
3、遥控与飞机之间不能有建筑物遮挡,天线始终对着飞机,如果出现信号弱(上升高度会改善信息)
- 高度过低,容易进入姿态模式(GPS信号容易被周围高楼遮挡)
- 玻璃墙等墙面影响无人机信号接收
- 在高楼中飞行,要在可视范围内飞行
姿态模式(无人机无法定点悬停和自主刹车,无人机会乱飘)
指南针受到干扰,环境光线过暗,GPS信号差,都会进入姿态模式
- 姿态球中,遥控要始终对着飞机,避免信号不好
4、如果飞行过程中,手机突发关机,此时可以采用遥控器返航功能
5、有人恶意发射电磁枪,必炸机
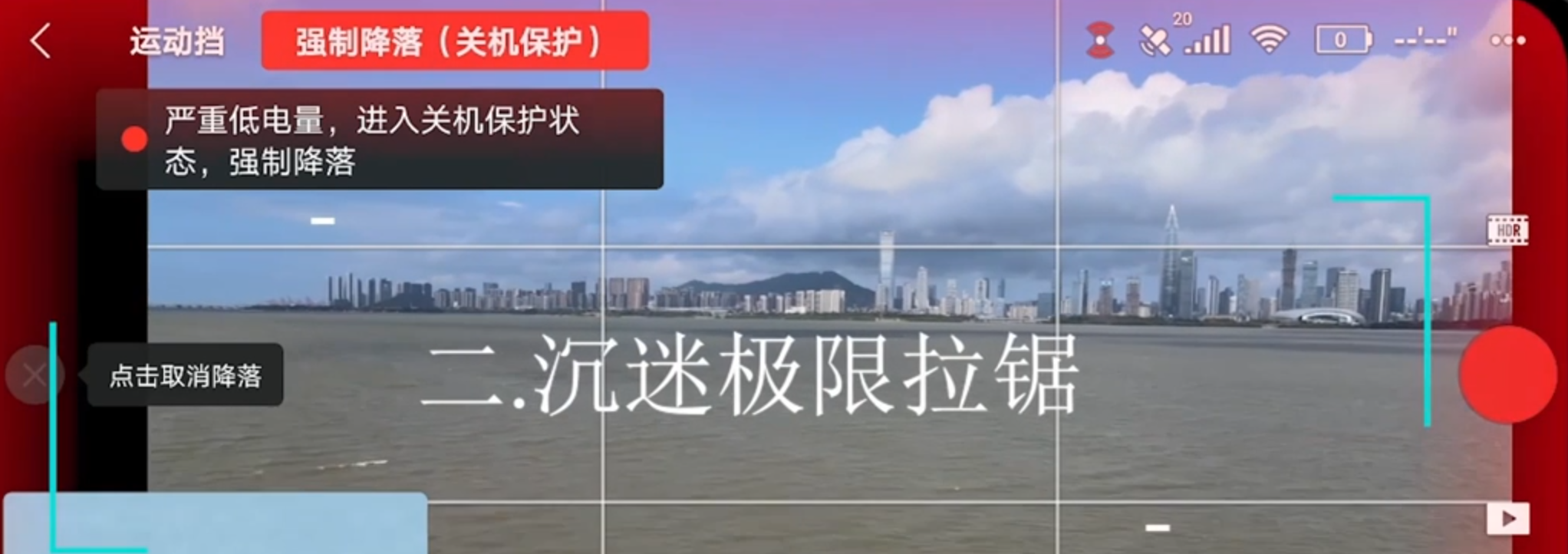
6、时刻留意飞机电量(30%左右电量时,就及时收飞机),电量快耗尽时,飞机会强制降落(如果飞行距离较远,则可能被别人捡到了)
7、无人机在空中飞行时,不要使用这两种动作(这两种动作是用于故障时设置的)
8、在阳台起飞,非常危险,因为没有GPS信号,则无人机采用的是视觉定位;往外飞时,不会马上又GPS信号;
- 视觉定位最佳工作高度是30m以内(楼层过高,视觉定位就会失效,无人机会进入姿态模式,会随机漂移,容易炸机)
- 解决办法,快速往外飞,不用多久,就有GPS信号
9、速度档,智能避障功能会失效,刹车距离也会加长,容易炸机
10、贴水飞行,无人机气压计会收到干扰,无法精准定位高度,无人机可能会越飞越低(高度无法受到飞控控制)


最大飞行高度:往上飞500m,往下飞没有下限高度
最大飞行海拔高度:5000m
最大遥控距离:12km
二、安全设置
1、刹停更安全(无侧视)
- 注意:侧飞时需要注意,没有侧向避障
2、虚拟护栏
- 注意:返航高度设置,应高于飞行区域高楼高度(如269m)
如果失联,不会炸机:

3、补光灯

4、失联应设置为返航

5、运行空中紧急停桨

三、操控设置
1、目标扫描
打开后,无法拍摄高帧视频
2、云台
拨动滚轮,调节云台角度
单击fn,云台回中或者向下
3、遥杆
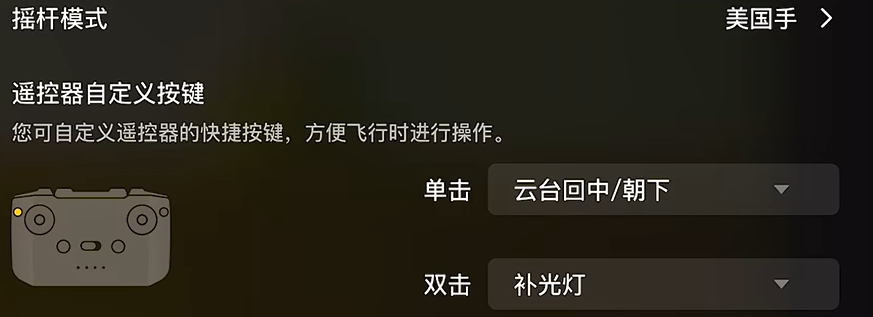
4、拍摄设置
5、遥控器和飞机对频
遥控器端:按住自定义按键Fn + 拍照按键 + 拍照/视频按键 = 灯开始跑动
飞机端: 长按4s=灯开始跑动
6、飞机起飞降落
两个摇杆下拉到底部,然后内八 --起飞
无人机在地面端,下拉左摇杆到底部 --电机关闭
7、变焦
Fn + 滚轮 --》 变焦
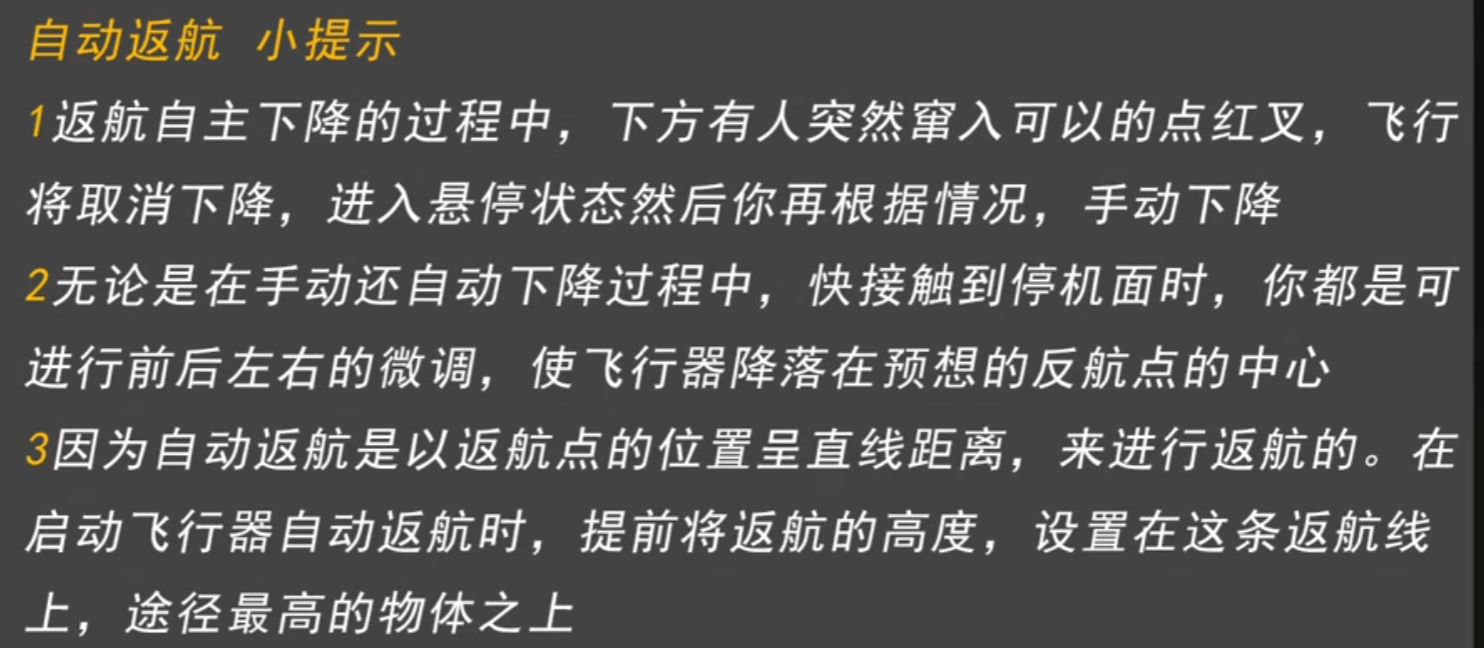
8、智能返航
遥控器端:
当手机出现异常,app退出,则可以直接遥控器端返航
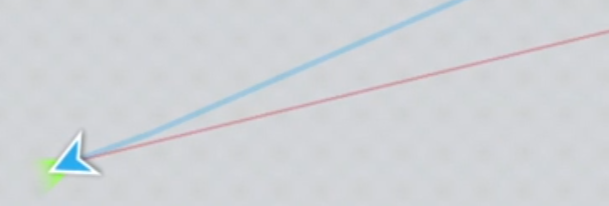
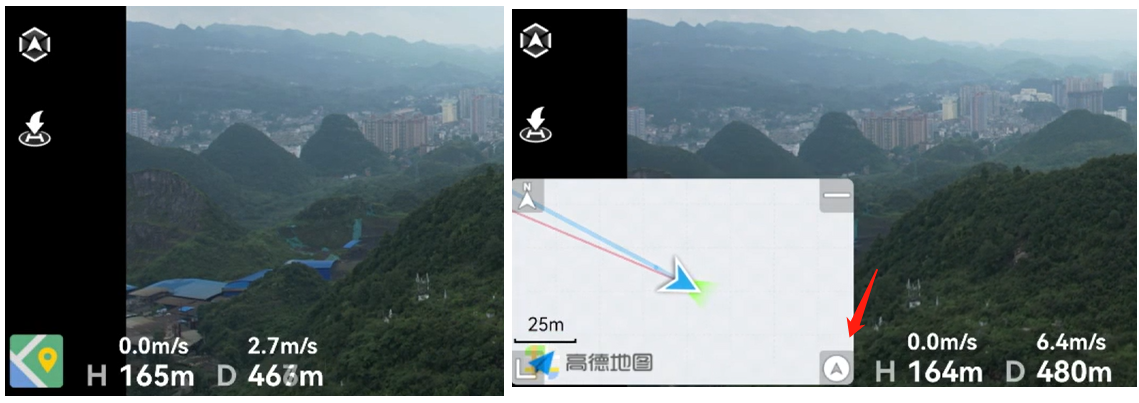
超视距手动返航:
打开地图,发现无人机朝向和返航线方向不一致,手动调成一致
然后,手动拨动方向摇杆,快速前进返航
9、地图模式与姿态球模式切换
10、找飞机
飞机出现意外,则尝试找飞机功能
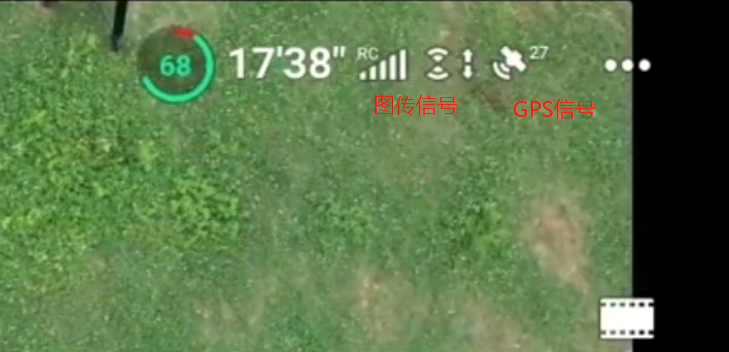
11、信号指示
12、更新返航点
如果你不是在飞机起飞的位置时进行返航,更新返航点,此时飞机会返航到你的现有位置
13、IMU和指南针
显示异常,则需要进行校正

14、图传
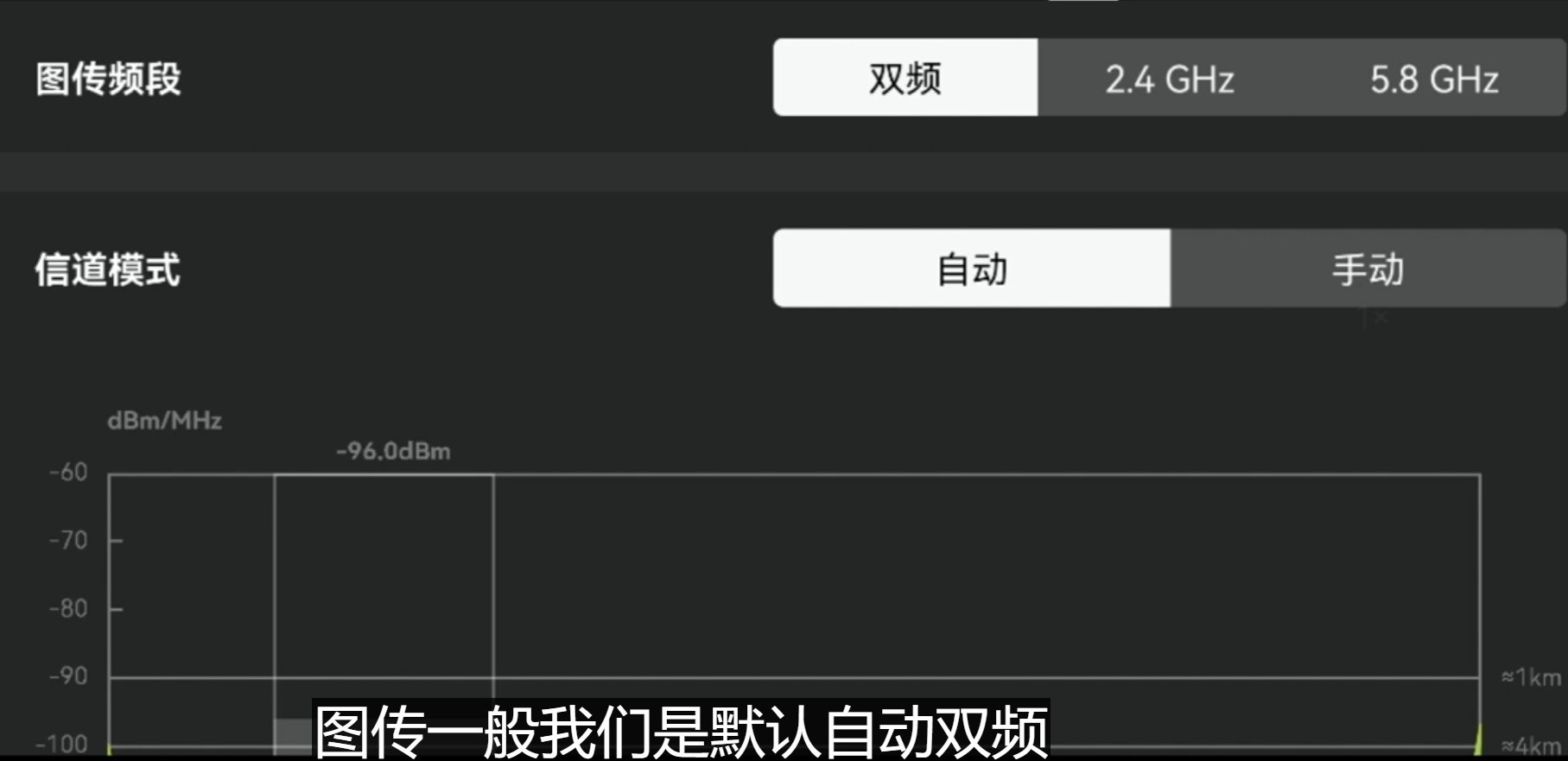
城市选择手动模式5.8G比较好:

离城市很远的郊外,选择手动模式2.4G比较好:

2.4G:
好处:绕过行好,有建筑物或者障碍物阻挡的时候,绕过性好。有利于复杂物理环境时的飞行。
缺点:由于2.4G频率属于民用开放频率,恰好WIFI也工作在此频段,所以此频段的信号干扰可能比较多,特别熟靠近居民区或者公共热点的地方。
5.8G:
好处:处于5.8G的wifi相对来说少(但是目前越来越多,802.11AC的5G频段就是5.8G),所以被干扰的可能比2.4G相对小一点点,而且由于5.8G频率高,绕过性很差(家里路由器穿墙性能差),所以也降低了被干扰的可能。
缺点:也是比较矛盾的地方,由于5.8G绕过性差,导致信号容易被阻挡,所以在地形复杂的环境下,5.8G非常不利。开阔环境中使用比较有优势。
15、容易炸机的坏习惯
- 电池鼓包,不能继续使用
安装上后,如果缝隙比较大,就不再使用了

- 极限拉锯
- 在阳台起飞
非常危险,因为没有GPS信号,则无人机采用的是视觉定位;
往外飞时,不会马上又GPS信号;
- 视觉定位最佳工作高度是30m以内(楼层过高,视觉定位就会失效,无人机会进入姿态模式,会随机漂移,容易炸机)
- 解决办法,快速往外飞,不用多久,就有GPS信号
- 高楼中穿梭
高度过低,容易进入姿态模式(GPS信号容易被周围高楼遮挡)
玻璃墙等墙面影响无人机信号接收
在高楼中飞行,要在可视范围内飞行

- 贴水飞行
无人机气压计会收到干扰,无法精准定位高度,无人机可能会越飞越低(高度无法受到飞控控制)
- 夜间飞行
- 电线
- GPS信号,防止进入姿态模式
- 一镜到底的骚操作
如果不是足够开阔,很容易炸机
- 速度档
智能避障功能会失效,刹车距离也会加长,容易炸机
- 摇杆一直保持较大偏移量
各种电线和缆线是无人机杀手

- 检查桨叶
桨叶破损和松动,很容易炸机
- 有风天气飞行
逆风飞远,顺风返航(节省电量)
四、保养
这篇关于DJI AIR 2S的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!