本文主要是介绍蓝桥杯嵌入式第10届真题(完成) STM32G431,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
蓝桥杯嵌入式第10届真题(完成) STM32G431
题目
main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "tim.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "led.h"
#include "key.h"
#include "myadc.h"
#include "stdbool.h"
#include "stdio.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
int8_t upled = 0x01;
int8_t uplednum = 1;
int8_t lowled = 0x02;
int8_t lowlednum = 2;
float upval = 2.4;
float lowval = 1.2;
float val;
uint32_t led1time = 0;
uint32_t led2time = 0;
uint8_t led1enable = 0;//开关
uint8_t led2enable = 0;
uint8_t view = 0;
uint8_t lcdtext[30];
uint8_t status[30];
extern struct Key key[4];
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void led_process(void);
void lcd_process(void);
void adc_process(void);
void key_process(void);
/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void lcdclear(void)
{LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);
}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_ADC2_Init();MX_TIM2_Init();/* USER CODE BEGIN 2 */HAL_TIM_Base_Start_IT(&htim2);LCD_Init();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */lcdclear();led_display(0x00);while (1){key_process();adc_process();lcd_process();led_process();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};/** Configure the main internal regulator output voltage*/HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;RCC_OscInitStruct.PLL.PLLN = 20;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}/** Initializes the peripherals clocks*/PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC12;PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 */
void led_process(void)
{static bool led1flag = false;static bool led2flag = false;uint32_t currentTick = HAL_GetTick(); // 获取当前的系统时刻if(led1enable && (currentTick - led1time >= 200)){led1time = currentTick; // 更新时间戳led1flag = !led1flag; // 切换标志状态if(led1flag){led_display(upled); // 点亮LED}else{led_display(0x00); // 熄灭LED}}if(led2enable && (currentTick - led2time >= 200)){led2time = currentTick; // 更新时间戳led2flag = !led2flag; // 切换标志状态if(led2flag){led_display(lowled); // 点亮LED}else{led_display(0x00); // 熄灭LED}}
}void lcd_process(void)
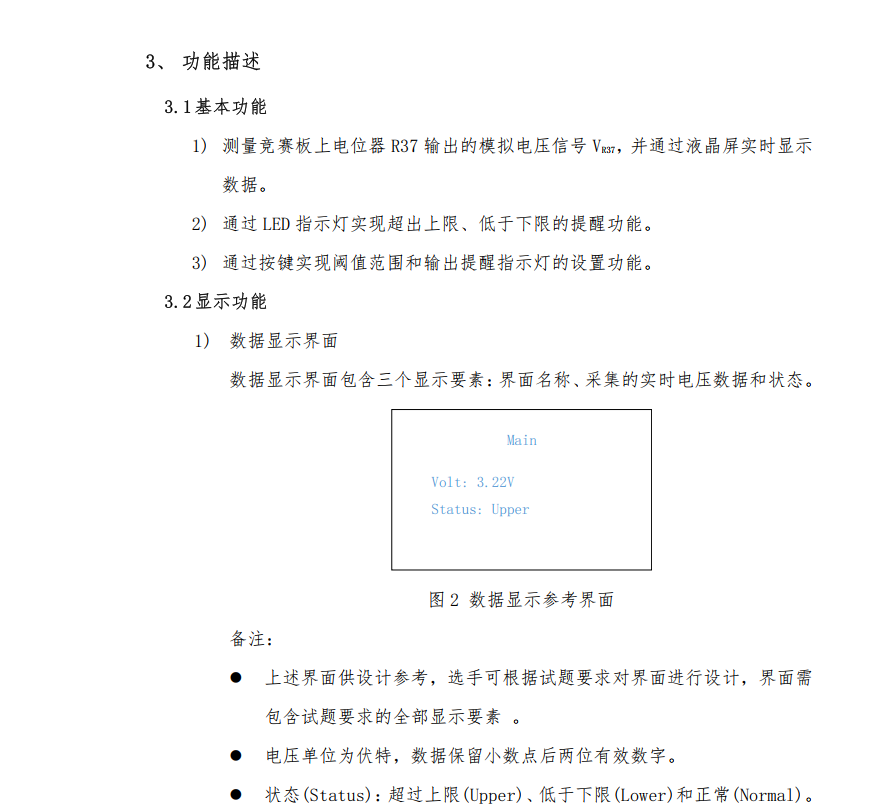
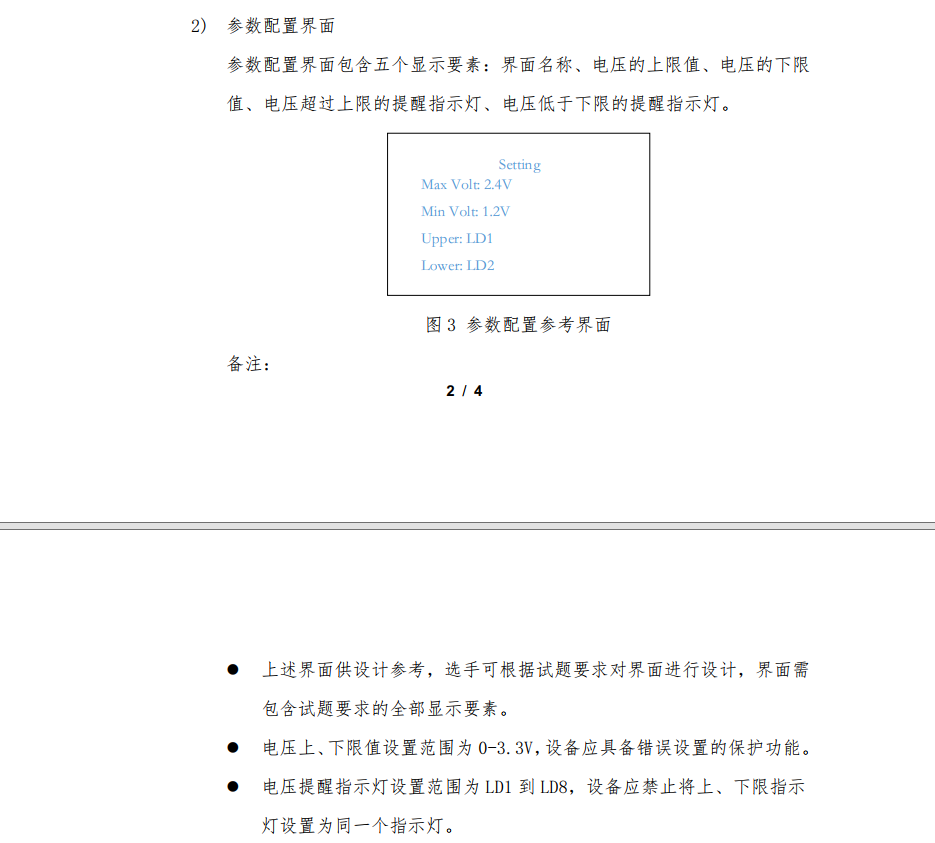
{switch(view){case 0:{sprintf((char *)lcdtext," Main");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Volt:%.2f",val);LCD_DisplayStringLine(Line4,lcdtext);sprintf((char *)lcdtext," Status:%s",status);LCD_DisplayStringLine(Line6,lcdtext);}break;case 1:{sprintf((char *)lcdtext," Setting");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Max Volt:%.2f",upval);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," Min Volt:%.2f",lowval);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," Upper:LD%d",uplednum);LCD_DisplayStringLine(Line7,lcdtext);sprintf((char *)lcdtext," Lower:LD%d",lowlednum);LCD_DisplayStringLine(Line9,lcdtext);}break;case 2://maxval{sprintf((char *)lcdtext," Setting");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Max Volt:%.2f",upval);LCD_SetBackColor(Green);LCD_DisplayStringLine(Line3,lcdtext);LCD_SetBackColor(Black);sprintf((char *)lcdtext," Min Volt:%.2f",lowval);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," UpperLD:%d",uplednum);LCD_DisplayStringLine(Line7,lcdtext);sprintf((char *)lcdtext," Lower:LD%d",lowlednum);LCD_DisplayStringLine(Line9,lcdtext);}break;case 3://minval{sprintf((char *)lcdtext," Setting");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Max Volt:%.2f",upval);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," Min Volt:%.2f",lowval);LCD_SetBackColor(Green);LCD_DisplayStringLine(Line5,lcdtext);LCD_SetBackColor(Black);sprintf((char *)lcdtext," Upper:LD%d",uplednum);LCD_DisplayStringLine(Line7,lcdtext);sprintf((char *)lcdtext," Lower:LD%d",lowlednum);LCD_DisplayStringLine(Line9,lcdtext);}break;case 4://led1{sprintf((char *)lcdtext," Setting");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Max Volt:%.2f",upval);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," Min Volt:%.2f",lowval);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," Upper:LD%d",uplednum);LCD_SetBackColor(Green);LCD_DisplayStringLine(Line7,lcdtext);LCD_SetBackColor(Black);sprintf((char *)lcdtext," Lower:LD%d",lowlednum);LCD_DisplayStringLine(Line9,lcdtext);}break;case 5://led2{sprintf((char *)lcdtext," Setting");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Max Volt:%.2f",upval);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," Min Volt:%.2f",lowval);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," Upper:LD%d",uplednum);LCD_DisplayStringLine(Line7,lcdtext);sprintf((char *)lcdtext," Lower:LD%d",lowlednum);LCD_SetBackColor(Green);LCD_DisplayStringLine(Line9,lcdtext);LCD_SetBackColor(Black);}break;}
}
void adc_process(void)
{val = getADcVal(&hadc2);if(val>upval){led1enable = 1;led2enable = 0;sprintf((char *)status,"Upper ");}else if(val<=upval&&val>=lowval){led1enable = 0;led2enable = 0;led_display(0x00);sprintf((char *)status,"Normal ");}else{led1enable = 0;led2enable = 1;sprintf((char *)status,"Lower ");}
}
void key_process(void)
{if(key[0].key_single_flag){lcdclear();key[0].key_single_flag = 0;if(view==0){view = 1;}else if(view==1||view==2||view==3||view==4||view==5){view = 0;}}if(key[1].key_single_flag){lcdclear();key[1].key_single_flag = 0;if(view==1){view = 2;}else if(view>=2&&view<=5){view++;if(view>5)view = 2;}}if(key[2].key_single_flag) {key[2].key_single_flag = 0; // 清除按键标志位if(view == 4) { // 选择upleduplednum = (uplednum % 8) + 1; // 循环遍历1到8upled = 0x01 << (uplednum - 1); // 更新upled位掩码} else if(view == 5) { // 选择lowledlowlednum = (lowlednum % 8) + 1; // 循环遍历1到8lowled = 0x01 << (lowlednum - 1); // 更新lowled位掩码}}if(key[3].key_single_flag) {key[3].key_single_flag = 0; // 清除按键标志位if(view == 4) { // 选择upleduplednum = (uplednum == 1) ? 8 : uplednum - 1; // 反向循环遍历8到1upled = 0x01 << (uplednum - 1); // 更新upled位掩码} else if(view == 5) { // 选择lowledlowlednum = (lowlednum == 1) ? 8 : lowlednum - 1; // 反向循环遍历8到1lowled = 0x01 << (lowlednum - 1); // 更新lowled位掩码}}}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state *//* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
key.c
#include "key.h"struct Key key[4]={0,0,0,0};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM2){key[0].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);key[1].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);key[2].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);key[3].key_gpio = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);for(int i = 0;i<4;i++){switch(key[i].key_status){case 0:{if(key[i].key_gpio==0){key[i].key_status = 1;}}break;case 1:{if(key[i].key_gpio==0){key[i].key_single_flag = 1;key[i].key_status = 2;}else{key[i].key_status = 0;}}break;case 2:{if(key[i].key_gpio==1){key[i].key_status = 0;}}break;}}}
}led.c
#include "led.h"void led_display(uint8_t led)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOC,led<<8,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}myadc.c
#include "myadc.h"
float getADcVal(ADC_HandleTypeDef *hadc)
{float val;HAL_ADC_Start(hadc);val = HAL_ADC_GetValue(hadc);return val*3.3f/4096;}这篇关于蓝桥杯嵌入式第10届真题(完成) STM32G431的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







