本文主要是介绍【B题完整论文】2024美赛完整论文+代码参考(无偿分享),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
B题:寻找潜水器

一、 问题分析
1.1 问题一分析
首先该问题并没有现成的数据,所以说我们需要先进行数据收集。
在该问题中,我们要首先搜集关于小型潜艇的相关参数。相关参数可以包括潜艇体积、常规重量,以及可调节的重量范围等参数。然后我们还要搜集相关海域的参数。例如海流的速度范围,海水的密度范围分布和相关区域的地理环境状况。
接着我们就该进行相关的模型简化以及力学与运动分析了。简化为圆柱形或者圆柱形的相关变体,虽然会增加难度,但是会使模型更加贴切。这里不是很建议简化成球体,虽然会比较好算。在受力分析时,我们可以采用比较传统的经典力学分析方式,也可以采用流体力学分析方式,流体力学分析方式虽然比较复杂,但是会显得更加高端。具体的海底地理环境其实影响的是受力分析中的相关物理参数,所以说我们只需要把这部分融合到数理分析中就行了。而海水的不同密度显然是在Z轴上,也就是我们的垂直方向的沉浮方面影响潜艇的。
该题目中的不确定性来源其实就是这些参数的范围是可以变动的,而具体怎么变动,其实有一定的随机性,所以说就会造成不确定性。在这里最好可以建完模型之后进行一下仿真,并且确定相关概率,分布区域,这样会为接下来的问题打下一个较好的基础。至于向主船发送哪些信息来减小不确定性,我们只需要针对于之前会造成不对定性因素进行测量,那么我们就可以来减小这些不确定度,然后再去找这些物理参量对应的相关仪器即可。
1.2 问题二分析
在第二问中要求我们对额外的搜索设备进行部署。对于这些设备,我们可以分为两类,一类是直接测量类的,一类是间接测量类的。直接测量类的,比如雷达,声纳等,我们可以根据相关的设备来建立合理的模型。而另一类是测量型的设备,比如温度计或者洋流计等等,可以测量相关物理量的设备来修正第一问中的模型。这里需要额外说明的是,像这种直接搜索型的设备,其实成本是相当高的。所以很可能我们只能带较少的直接搜索设备,然后再带一些测量类的设备。 另外要注意对于我们的这些设备,可能对方是希望我们可以提供更加具体的参数的,而不是仅提供设备的类型,而如果要考虑具体参数,我们不妨先看一下后续问题中对于参数有是否有相关的限制,而第三问中恰好有相关的限制,所以说我们可能需要根据第三问的答案来调整相关设备的参数。
1.3 问题三分析
在第三问中,我们首先要知道这里需要联系第一问,因为第一问算出了一个不确定度,在这个不确定度,其实是框定了一个搜索范围。根据我们考虑到的不同设备参数,会有不同的优化方案。如果我们采用的仪器只是舰载型的仪器,那么其实优化是相对而言比较简单的。但是在优化时我们还是要考虑粮油的问题,因为如果潜艇是处于漂浮状态,或者海底的泥沙阻力小于洋流的动力,那么我们要知道潜艇的坐标其实是会随着时间的变化而变化的,那么我们就要考虑洋流对潜艇的作用。如果在之前的优化过程中采取了舰载无人机这种方式的话,那么就可以尝试使用搜索与救援优化算法(SAR)等比较复杂的算法。至于确定找到潜水器的概率,这个其实完全可以通过使用计算机模拟,进行多次重复,以频率来代替概率。
1.4 问题四分析
至于扩展到其他旅游目的地,比如加勒比海,其实我们只需要换相关参数即可,这个对模型的整体影响并不是很大。而多个潜水器在同一附近进行移动该如何改变,个人认为这个问题可以转换为搜索初始点选择的问题。为达到最优效果,救援的搜索一开始肯定是要在最大概率区域来进行寻找的。而存在多个潜水器就需要权衡具体选在哪个处室位置可以兼顾这些区域。并且作为一个值得提到的点,我们认为如果再找到其中一个潜水器后,整体的概率分布会有一个变化,那么我们就需要让船只前往最近的大概率区,这样的话可能会有一个较好的优化效果。
二、 模型假设与符号说明
1.1 符号说明
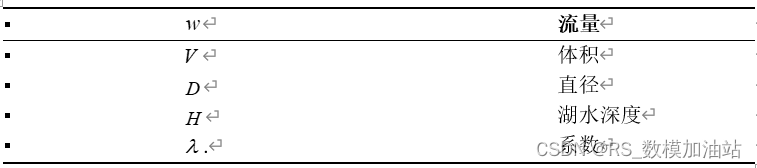
三、 模型建立与求解
3.1 问题一模型建立与求解
3.1.1 问题一求解思路
首先该问题并没有现成的数据,所以说我们需要先进行数据收集。
在该问题中,我们要首先搜集关于小型潜艇的相关参数。相关参数可以包括潜艇体积、常规重量,以及可调节的重量范围等参数。然后我们还要搜集相关海域的参数。例如海流的速度范围,海水的密度范围分布和相关区域的地理环境状况。
接着我们就该进行相关的模型简化以及力学与运动分析了。简化为圆柱形或者圆柱形的相关变体,虽然会增加难度,但是会使模型更加贴切。这里不是很建议简化成球体,虽然会比较好算。在受力分析时,我们可以采用比较传统的经典力学分析方式,也可以采用流体力学分析方式,流体力学分析方式虽然比较复杂,但是会显得更加高端。具体的海底地理环境其实影响的是受力分析中的相关物理参数,所以说我们只需要把这部分融合到数理分析中就行了。而海水的不同密度显然是在Z轴上,也就是我们的垂直方向的沉浮方面影响潜艇的。
该题目中的不确定性来源其实就是这些参数的范围是可以变动的,而具体怎么变动,其实有一定的随机性,所以说就会造成不确定性。在这里最好可以建完模型之后进行一下仿真,并且确定相关概率,分布区域,这样会为接下来的问题打下一个较好的基础。至于向主船发送哪些信息来减小不确定性,我们只需要针对于之前会造成不对定性因素进行测量,那么我们就可以来减小这些不确定度,然后再去找这些物理参量对应的相关仪器即可。
3.1.2 已知信息收集
民用小型潜水艇长2米8,宽2米3,重量只有2500公斤左右,
年平均气温在16-19.5◦C
(Sea Surface Temperature Variability and Marine Heat Waves over the Aegean, Ionian, and Cretan Seas from 2008–2021 )
3.1.3 竖直方向位置模型
(1)海洋参数
海洋每日最高温度温度出现在15:00左右,最低温度出现在6:00左右
温度变化较为缓慢,在误差容许范围内不妨写成
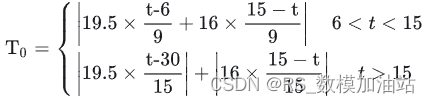
(这个是比较简单的写法,后面我提供了非线性写法)
该函数可以近似代表海洋表面温度
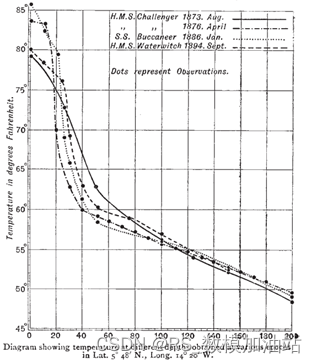
一般来说,海洋深度越深,水温越低。(Oceanic Temperatures at Different Depths,以下部分内容来自本文章,一篇很早之前的nature)根据文章,海洋温度随深度的变化规律是:在200 fathoms(约365米)的深度范围内,温度随深度的增加而逐渐降低,但降低的速度逐渐减慢。在100 fathoms(约182米)的深度范围内,温度随深度的增加而迅速降低,但在100 fathoms以下,温度随深度的增加而降低的速度逐渐减慢。在200 fathoms以下,温度随深度的增加而降低的速度非常缓慢,几乎保持不变,如图:
对于海水温度随深度变化的一般趋势,可以使用非线性模型来更准确地描述。其中,一个常用的模型是指数递减模型。
可以使用以下公式来描述海水温度与深度的关系: T = T0 - A ⋅exp(-b⋅h)
其中,T是海水的温度,T0是海表面的温度,A和b是常数参数,h是海水的深度。
在这个模型中,随着深度的增加,指数函数会导致温度逐渐趋于平稳,从而更好地反映了实际情况。
需要注意的是,实际的海水温度分布可能会受到多种复杂因素的影响,如地理位置、季节、洋流、海底地貌等。如果有更详细的数据和背景信息,可以针对具体情况调整模型参数或使用更复杂的模型以更准确地描述海水温度与深度的关系。
ρ = ρ 0 + α (S - S0) + β (T - T0)
其中,ρ是海水的密度,ρ₀是参考密度,α和β是温度和盐度对海水密度的影响系数,S是海水的盐度,S₀是参考盐度,T是海水的温度,T₀是参考温度。
(The density of seawater as a function of salinity (5 to 70 g kg−1 ) and temperature (273.15 to 363.15 K) )
根据文献所示,
盐度的变化可以近似为 S=S0−kh
综合带入整理可得

(其他形式可以参考Boyer, T. P., et al. (2009), World Ocean Database 2009, S. Levitus (ed), NOAA Atlas NESDIS 66, U.S. Gov. Printing Office, Wash. D.C., 216 pp., DVDs.)
接下来使用 F=ρgV
![]()
对于水平面上的内容我们可以做如下建模
绕流阻力有以下两种作用方式
在平稳情况下平稳纳维尔-Stokes方程如下
![]()
对于侧面
可以简化为为典型的绕圆柱模型
由于在这些运动中雷诺数都很小,即它们的惯性力与黏性力相比要小得多,可以忽略不计。又由于体积力的影响也很小,也可略去
我们把这个问题看作是一个经过圆柱体的二维不可压缩流,它可能由于流体施加的升力而横向振荡。由于尾流是湍流的,因此采用LES方法来表示湍流。一种自然滤波操作,滤波器宽度为局部网格大小。过滤后的二维Navier-Stokes方程由流函数II/的泊松方程组成![]()
在极坐标系里算子可以继续如下简化
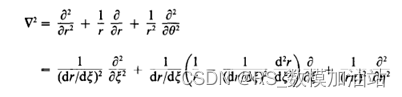
故有![]()
我们使用圆柱体周围的势流解作为初始流场。圆柱表面,流体速度等于圆柱的速度,即。![]()
其中,vt和vn(分别为圆柱体速度的切向分量和法向分量,v为流体速度向量,t和n分别为曲面的单位切向量和单位法向量。在固定在圆柱体上的坐标系中,我们有
![]()
![]()
对于正面
我们不妨简化其为胶囊状物体
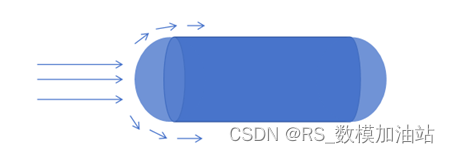
对于该种形状
现有方法可以将其简化为![]()
式中,h为动态粘度,U为球体中心线上未受扰动的流体速度,R为球体的半径。其中,Re为物体的等效球半径,H为等效球的表面与中心之间的距离;
式中,h为动态粘度,U为球体中心线上未受扰动的流体速度,R为球体的半径。
为高曼壁修正因子。
已有文献提供了一个对距离曲面的所有距离都有效的连续函数,用一个函数拟合如下:
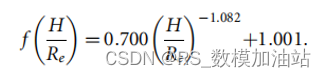
(A drag force interpolation model for capsule-shaped cells in fluid flows near a surface )
至此我们已经得到了海流从正面和侧面影响潜水艇的作用力表达式
在这里另外一个关键参数海流速度U并不是一个定值,在这里我们取常见范围1.8km/h到5km/h
于在这里,搜寻工作往往以小时为单位,那么在这里模型就应该以分钟为步长,但是z轴的输出图像需要以秒进行参考,分钟对于下沉本身是一个过于大的跨度
使用每一个状态与上一个状态耦合

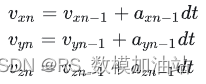
在这里要注意把元解析式带入

其中
X,Y是随机数,每次时间改变后也会改变
构建程序后即可进行输出,我这里建议输出多次,最好可以得出概率分布
以下展示部分随机后的XY坐标坐标漂流轨迹(此处洋流设定为会改变南北,但是一直向东方,设定原因:由于地中海洋流一般向东北或东南方向流动。)
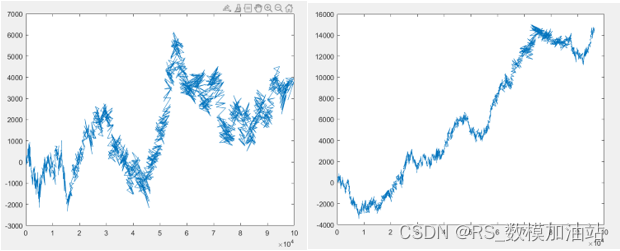
如果此处洋流设定为各个方向都可能变化,则不确定度更高(由于展示太长时间的话就太乱了,这里只展示前一段时间的轨迹)
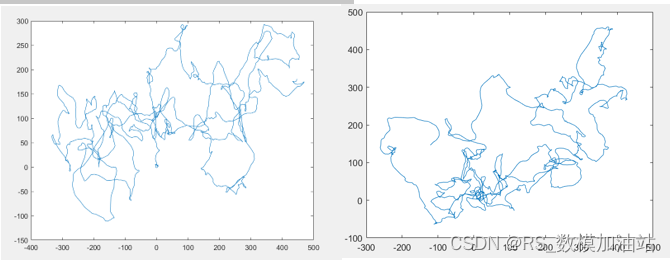
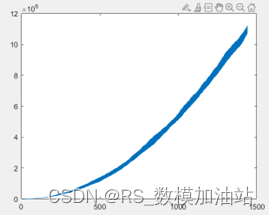
只有向南北东洋流随时间偏离初始位置如下
clc
dt=1
x=0;
y=0;
z=0;
vx=0;
vy=0;
vz=0;
%XRD=rand(1,1440);%用来改方向的
XRD=rand(1,1440)*2-1;
YRD=rand(1,1440)*2-1;
VX=[];
VY=[];
VZ=[];
X1=[];
Y1=[];
Z1=[];
R=[];
i_1=1
for t=[1:dt:1440]X=XRD(i_1);Y=YRD(i_1);Wx=5*X;Wy=5*Y;ax=1.8*(Wx-vx)-0.2*vx;%具体系数请自己计算ay=1.6*(Wy-vy)-0.2*vy;%具体系数请自己计算az=0.2*(10-0.5*z)-0.2*vz;%具体系数请自己计算vx=vx+ax*dt;vy=vy+ay*dt;vz=vz+az*dt;x=x+vx*dt;y=y+vy*dt;z=z+vz*dt;r=x*x+y*y;VX(end+1)=vx;VY(end+1)=vy;X1(end+1)=x;Y1(end+1)=y;Z1(end+1)=z;R(end+1)=r;i_1=i_1+1;
end
X2=X1*60;%*60是单位修正
Y2=Y1*60;%单位修正
Z2=Z1;
T=1:dt:1440;
plot(X2,Y2)
%plot(T,R)
%scatter(X1,Y1)
%scatter(T,R)
3.2 问题二模型建立与求解
3.2.1 建议使用什么额外的搜索设备来部署
目前主流的水下搜索设备如下搜索设备:
(1)便携式声纳(Portable Sonar):这种设备可以通过发射声波来探测水下物体,有助于确定潜水器的位置。
(2)深海摄像机(Deep-sea Camera):使用可以承受高水压的摄像机,可以在深海中捕捉图像,帮助定位潜水器。
(3)无人机(Unmanned Aerial Vehicle,UAV):无人机可以对广阔的海域进行空中搜索,快速发现潜水器的位置。
(4)水下机器人(Remotely Operated Vehicle,ROV):ROV可以被控制员操作,进行水下搜索和调查,获取关于潜水器的信息。
3.2.2 设备的可用性、维护、准备情况和使用相关的成本
而如果要使用这些设备,在准备和使用这些搜索设备时,需要考虑以下成本:
(1)设备成本:这些设备的购买和维护费用需要纳入预算考虑。
(2)人员培训:特定的设备可能需要操作员接受培训才能熟练使用,这将增加成本和时间。
(3)储存和保养:为存放和保养这些设备,可能需要专门的设备储藏室和维护计划。
以下为大致参考价格,不同地方价位也不同,这里只考虑民用基础型
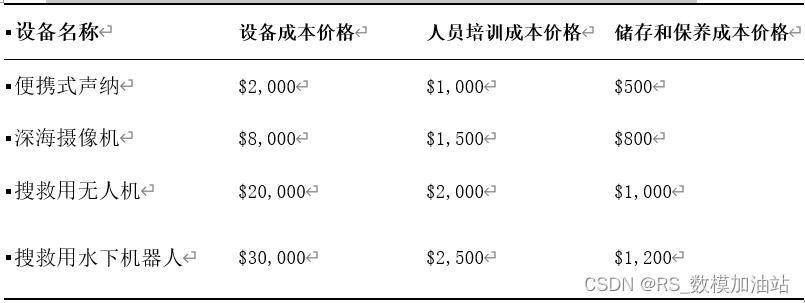
如果进行完整的配备,搜救工作显然会容易许多,但是成本过高,往往是公司难以提供的。
虽然深海摄像机,无人机,水下机器人等可以大幅度降低搜救时间,但是其设备成本,人员培训成本以及储存和保养过高,且在大范围搜救潜艇中性价比远不如声呐,所以在接下来的讨论中我们以声呐为主
根据第一问的计算,我们的声呐需要的工作深度可以承受在150m及以下,在民用价格范围内,扫描半径一般为200米左右,发射频率为500kHz,波束纵向宽度为0.8°,并且价格在可接受范围内(调查报价在1.5万元到12万元间都有,约合美元2000~16000)
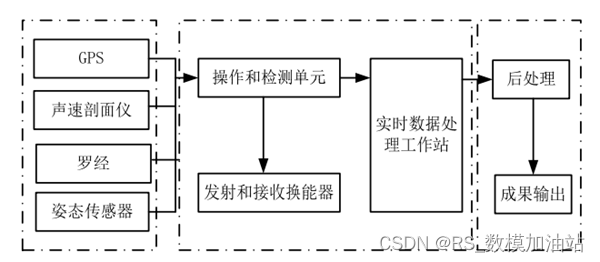
侧扫声呐系统是由多个子系统组成的复杂系统,尽管不同型号侧扫声呐系统在设计细节上有所差异,但其基本组成相同,大体上可分为侧扫声呐声学系统、外围辅助传感器、数据实时采集处理系统和成果输出系统,下图给出侧扫声呐系统的基本组成单元。(王玉峰.侧扫声呐目标探测及噪声抑制方法分析[D].中国地质大学(北京),2016.)
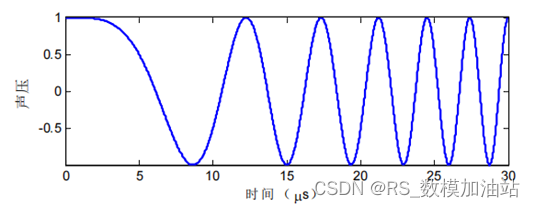
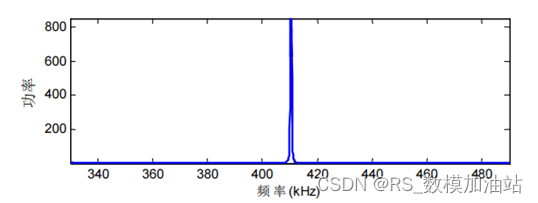
侧扫声呐发射脉冲形式主要有CW脉冲(单频矩形脉冲信号)和Chirp脉冲(调频脉冲)两种。当前侧扫系统大多采用Chirp信号,该信号是一种频率随时间线性增加(线性调频)的余弦波,信号幅值与时间的数学表达式如式所示:

信号瞬时频率:
![]()
时域波形图如下
chirp信号频谱如下
3.2.2 如有必要,救援船可能需要配备哪些额外的设备来协助?
但是实际上潜艇是在二维漂流的(因为数值方向趋于稳定了,所以三维近似为二维了),所以依然还是要进行搜索的
并且我们知道南北方向的洋流都可能存在,所以在y轴范围的活动领域很大,所以在必要时增加可以主船的无人机或者机器人也是可以接受的。
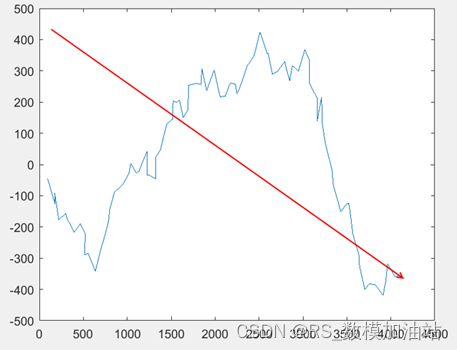
如果在救援船已知具有测量型的设备,比如温度计或者洋流计等设备,并且结合我们第一问中的模型来对潜艇位置进行预估
那么如果在失联半小时后立刻开始搜救,在初始距离为2000米的条件下,可以在一个半小时左右即可找到失联潜艇。(下图蓝线是潜艇偏离原位置的距离,红色代表主船行驶的距离,初始距离为-2000,此处为主船方向和速度不受洋流影响的理想情况)
路线示意图如下
这篇关于【B题完整论文】2024美赛完整论文+代码参考(无偿分享)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





