本文主要是介绍中小学电子编程内部集中培训第七课,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
舵机

舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可
以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;
遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。一
般舵机旋转的角度范围是 0 度到 180 度
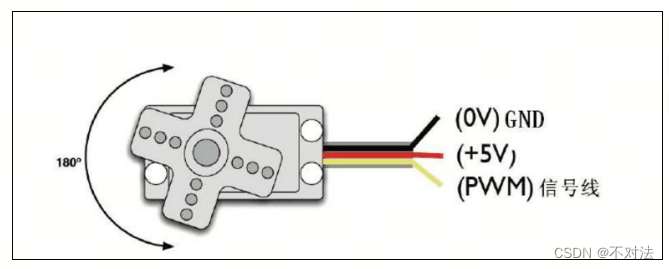
舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜
色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电
源正极线,橙色为信号线。
舵机的转动的角度是通过调节 PWM(脉冲宽度调制)信号的占空比来实现的,
标准 PWM(脉冲宽度调制)信号的周期固定为 20ms(50Hz),脉宽由 0.5ms
到 2.5ms 之间,脉宽和舵机的转角 0°~180°相对应。
对应的控制关系是:
0.5ms-------------0 度;
1.0ms------------45 度;
1.5ms------------90 度;
2.0ms-----------135 度;
2.5ms-----------180 度;
这部分用户可以做一个了解即可,因为程序中我们使用 Arduino 自带的舵机
驱动函数,不需要用代码去产生周期为 20ms,脉宽从 0.5ms-2.5ms 的方波。
这篇关于中小学电子编程内部集中培训第七课的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





