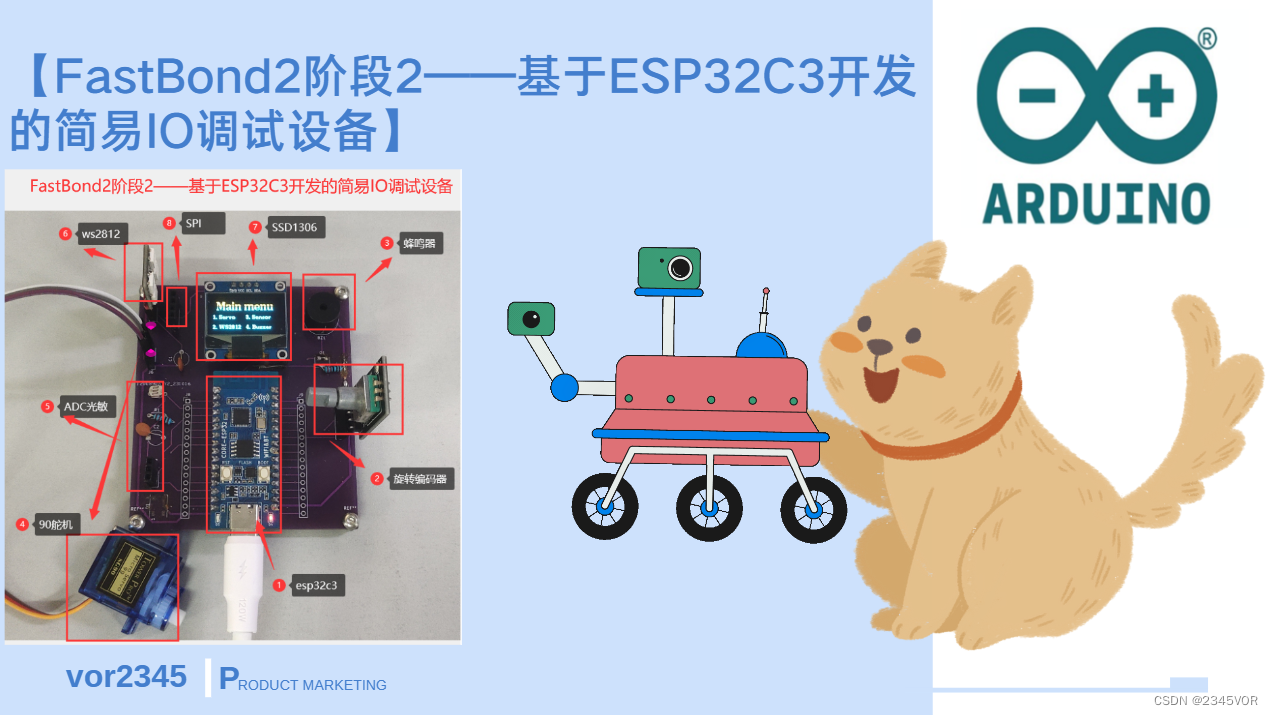
本文主要是介绍FastBond2阶段2——基于ESP32C3开发的简易IO调试设备,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
-
1. 项目介绍
之前买了许多国产单片机esp32c3一直在吃灰,没有发挥它的真实价值。非常感谢硬禾组织的Fastbond2活动,刚好两者经过微妙的碰撞。恰可以用于FastBond2活动主题4 - 测量仪器(单片机开发测试领域),或者用于国产ESP32C3单片机简单应用开发教育等领域。回顾立项过程,且听我娓娓道来!
1.1 立项目标
设计用户操作界面,该设备具备简单易用的操作界面,外加显示屏SSD1306和旋转编码器进行显示和控制,用户后期可进行二次开发WiFi或蓝牙连接电脑或手机监控。
1.2 立项指标
- 多种数字和模拟信号的输入输出:用户可以选择不同的输入输出模式,并通过设备的操作界面进行设置。例如,用户可以选择某个GPIO口作为模拟输入引脚,然后通过设备的操作界面设置输入的电压值,以模拟外部信号的输入,达到调试简易传感器读取和执行器输出功能。
- 支持PWM输出、舵机控制特性:用户可以选择某个GPIO口作为PWM输出引脚,并通过设备的操作界面设置PWM输出的频率和占空比。用户还可以选择某个GPIO口作为舵机控制引脚,并通过设备的操作界面设置舵机的角度。
- 因此系统具有一定的电流输出能力、信号辨识能力和显示交互功能。
-
2. 市场应用介绍
《FastBond2阶段2——基于ESP32C3开发的简易IO调试设备》是一种基于ESP32C3芯片开发的简易IO调试设备。它具有小巧、便携、功能强大等特点,可广泛应用于各个领域的电子设备调试和开发过程中。
市场应用介绍如下:
-
电子产品调试:该设备可以作为一种便携式的IO调试工具,用于电子产品的调试和测试。它支持多种接口,如GPIO、I2C、SPI、UART等,可以方便地与各种电子设备进行连接和通信,帮助工程师快速调试和验证电路功能。
-
物联网设备开发:随着物联网技术的发展,越来越多的设备需要与互联网进行连接和通信。该设备可以作为物联网设备开发过程中的工具,帮助开发者快速连接和通信,实现设备与云平台的数据传输和控制。
-
教育培训:该设备具有简单易用的特点,适合在教育培训领域使用。学生可以通过该设备学习和实践各种电子接口和通信协议的使用,提高他们的电子技术能力和创新能力。
-
嵌入式系统开发:对于嵌入式系统开发者来说,该设备可以作为一种基础工具,用于快速原型设计和验证。通过该设备,开发者可以快速连接和测试各种外设,并进行相关的软硬件开发工作。
-
DIY爱好者:该设备适合DIY爱好者使用,他们可以利用该设备进行各种创意项目的开发。无论是控制LED灯的亮灭,还是与其他传感器进行数据交互,都可以通过该设备实现,并为DIY爱好者们带来更多的乐趣和创造力。
综上所述,《FastBond2阶段2——基于ESP32C3开发的简易IO调试设备》具有广泛的市场应用前景。它可以满足不同领域的需求,为电子产品调试、物联网设备开发、教育培训、嵌入式系统开发和DIY爱好者等提供了简单、便捷、高效的解决方案。
-
3. 项目设计思路
项目地址:Scheme-it | 嵌入式快速调试设备 | DigiKey
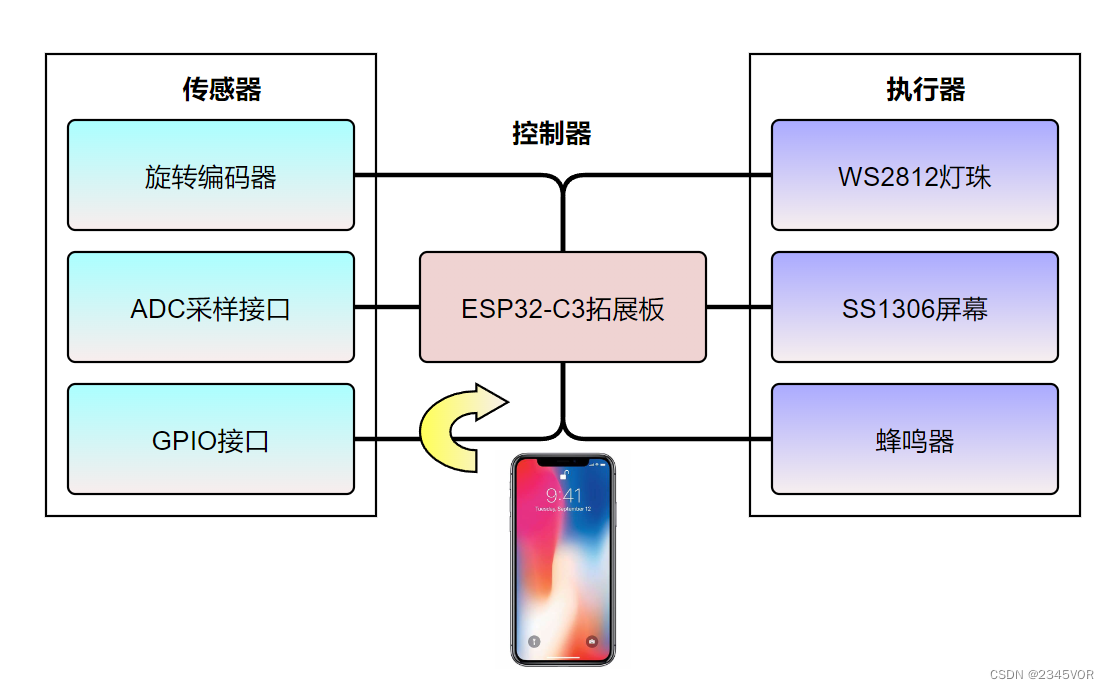
得捷电子的Scheme-it工具融合了原理图、框图和流程图绘制等功能,支持多种格式导出。并且,得捷电子提供原理图kicad格式导出的功能,同步导出对应器件的封装,减少查找封装的麻烦。Scheme-it无需专门下载安装,在浏览器在线运行,上手速度很快。这里我非常迅速画了系统的方案框图:
这里面的外设驱动详细内容见:【Arduino环境下驱动合宙esp32c3单片机基本外设】
-
4. 项目方案框图和原理图解释
4.1 系统设计流程图
接下来就是一步一个脚印把模块调通,最后进行解耦实验,有机会就用3D打印机打印一个外壳。如系统设计流程图所示
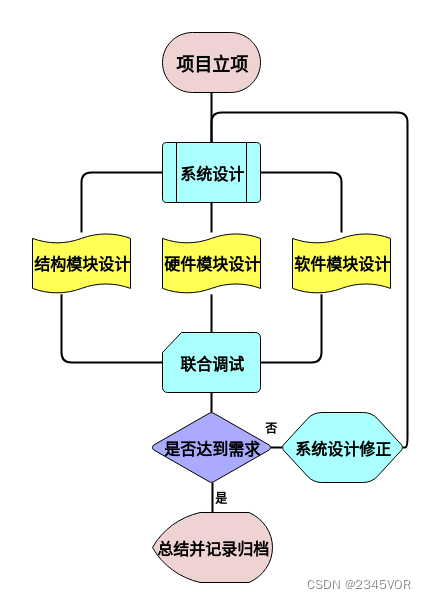
系统设计流程图是一个用于描述系统设计过程的流程图。在这个流程中,首先进行的是项目立项,然后进入系统设计阶段,包括结构设计和硬件模块设计。在硬件模块设计中,又包括硬件模块设计和软件模块设计。然后进行联合调试,如果调试成功,就进行系统设计修改,如果调试失败,就回到硬件模块设计进行更改,直到调试成功。最后,进行是总结并记录归档。
4.2 电路原理图
这里采用kicad绘制的原理图,这里面的蜂鸣器电路设计有缺陷,因此我加250Ω电阻直接飞线绕过三极管驱动蜂鸣器,我之前画过电路图(设计有诸多不合理,欢迎大家批评指正),但从来都没有打板子,这是我第一次打板子验证项目,非常感谢硬禾给机会,太感动了!
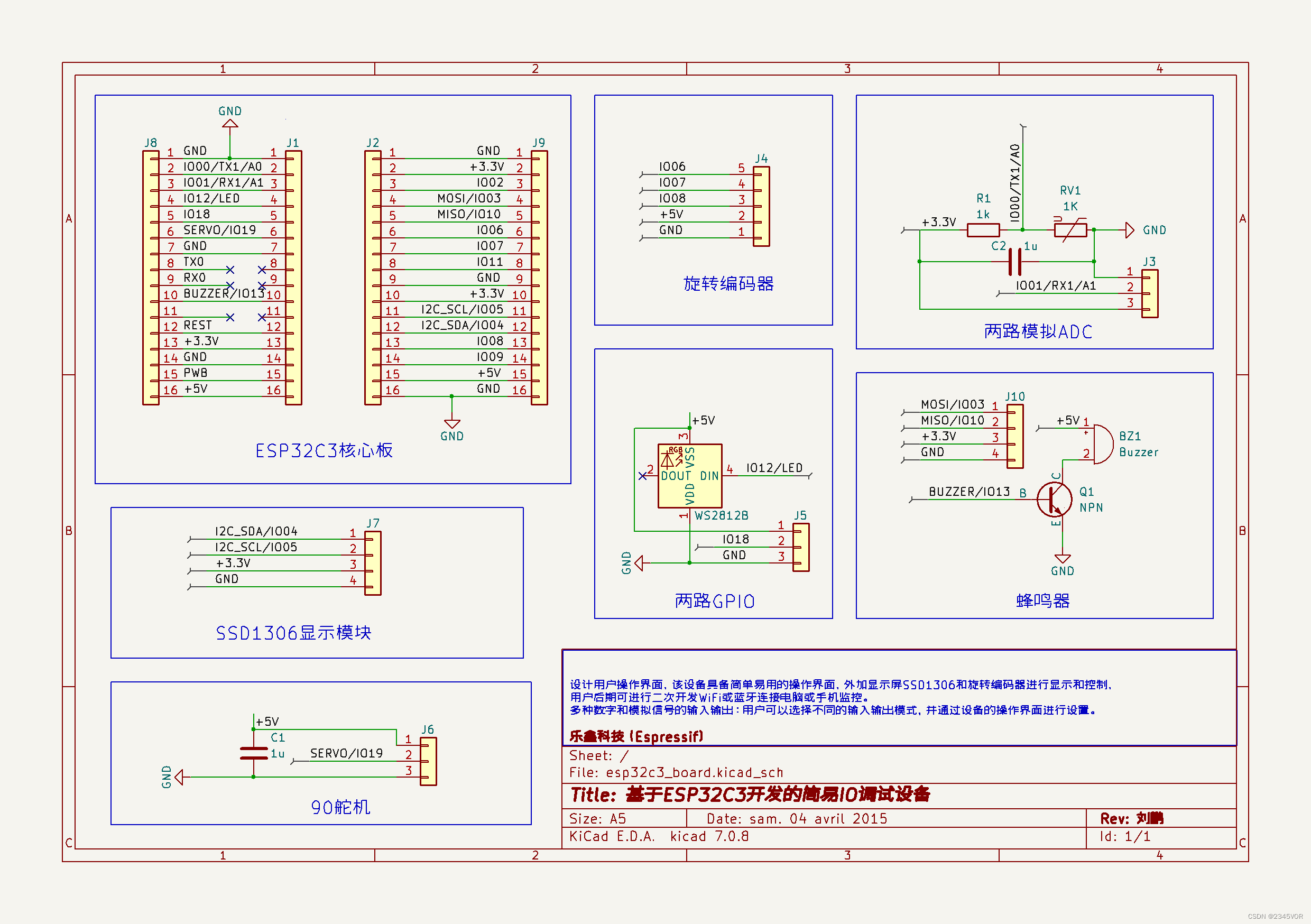
设计用户操作界面,该设备具备简单易用的操作界面,外加显示屏SSD1306和旋转编码器进行显示和控制,用户后期可进行二次开发WiFi或蓝牙连接电脑或手机监控。
多种数字和模拟信号的输入输出:用户可以选择不同的输入输出模式,并通过设备的操作界面进行设置。 引出了开发板全部可用端口,其中包括GPIO、ADC、UART、IIC、SPI端口。
这里面的外设驱动详细内容见:【Arduino环境下驱动合宙esp32c3单片机基本外设】
-
5. 设计中用到规定厂商的元器件介绍
这里采用了 乐鑫科技(Espressif)的ESP32-C3-MINI-1-N4,由于之前合宙esp32c3可以等效替代,对此采用这款合宙esp32c3开发板代替,是采用ESP32-C3-MINI-1-N4模组设计的。

ESP32C3MINI1技术规格书
ESP32-C3 系列芯片
由于项目需要达到300元包邮,所以我选购了Pi400键盘系统
期待后期有发光发热的地方叫上鹏鹏哦!
-
6. PCB绘制打板介绍及遇到的问题和解决方法
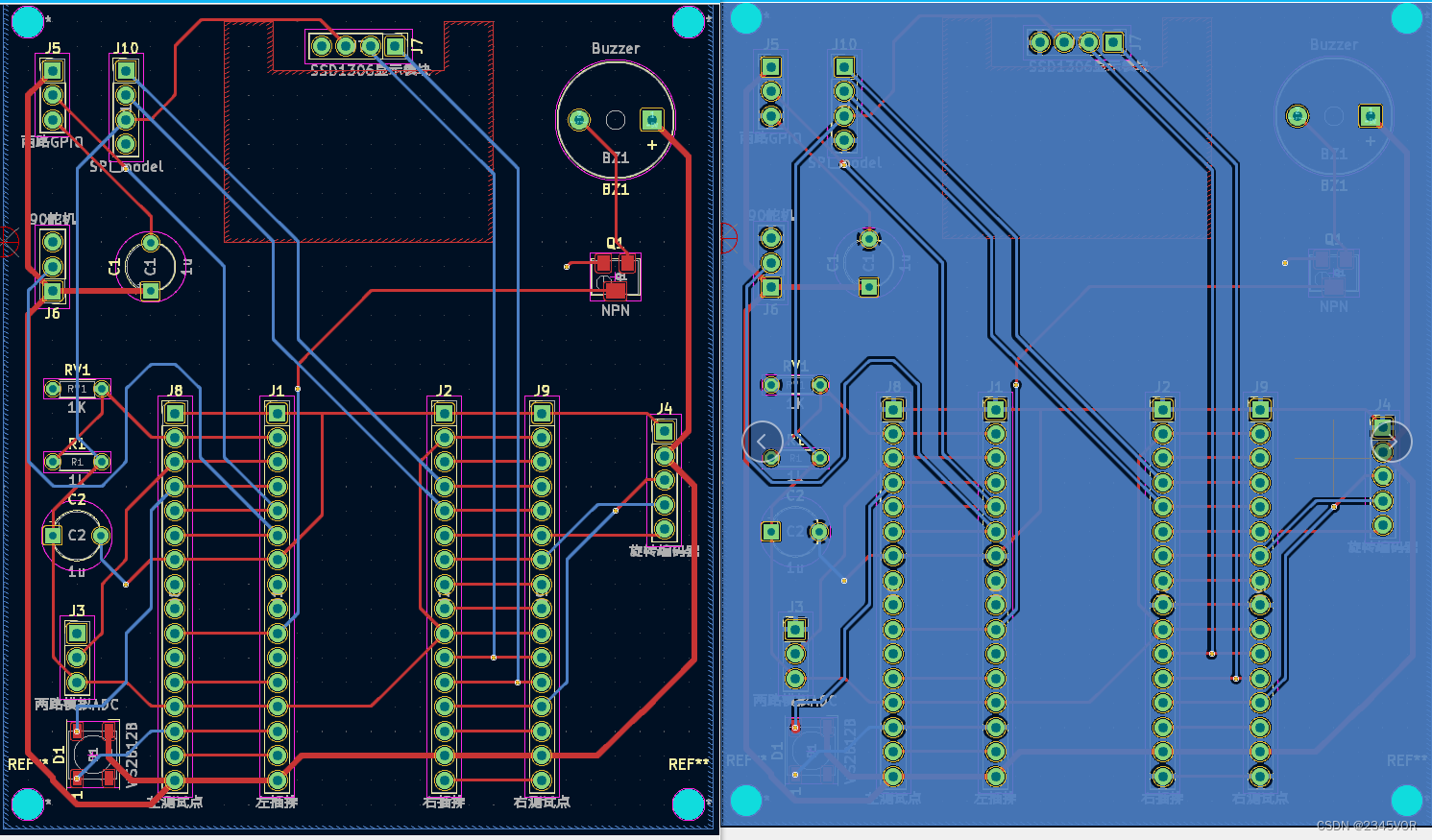
6.1 PCB板图
工程整体采用两层板结构;
底层覆铜设计,右边是覆铜效果,左边没有覆铜效果;
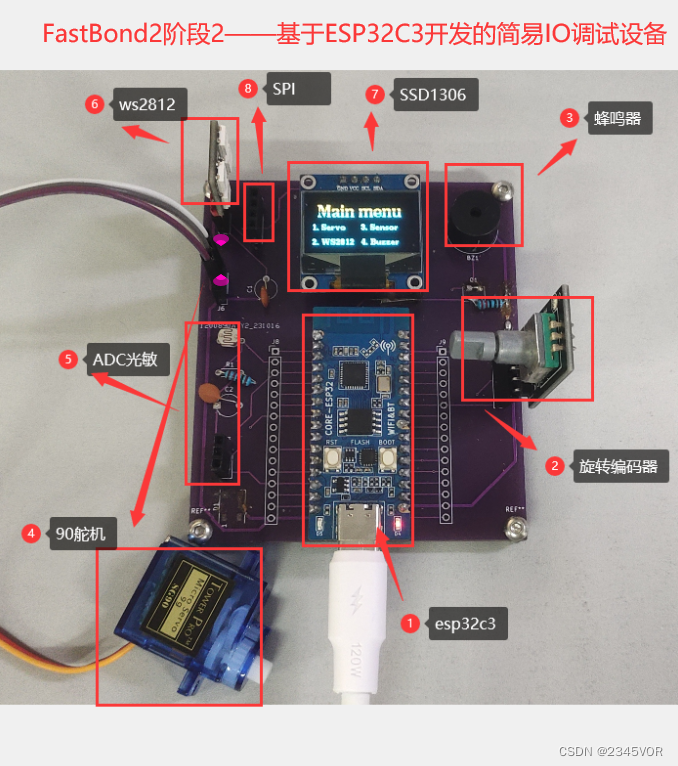
采用esp32c3单片机放在中间,底部板载USB供电,靠上设计SSD1306屏幕显示,基本外设左右排开,左边有SPI、舵机端口、ADC和WS2812。右边设计有蜂鸣器和旋转编码器,中间开发板的端口全部引出。
设计的尺寸非常小宽7.37*长8.64,四周设计了立柱。
6.2 3D封装效果图
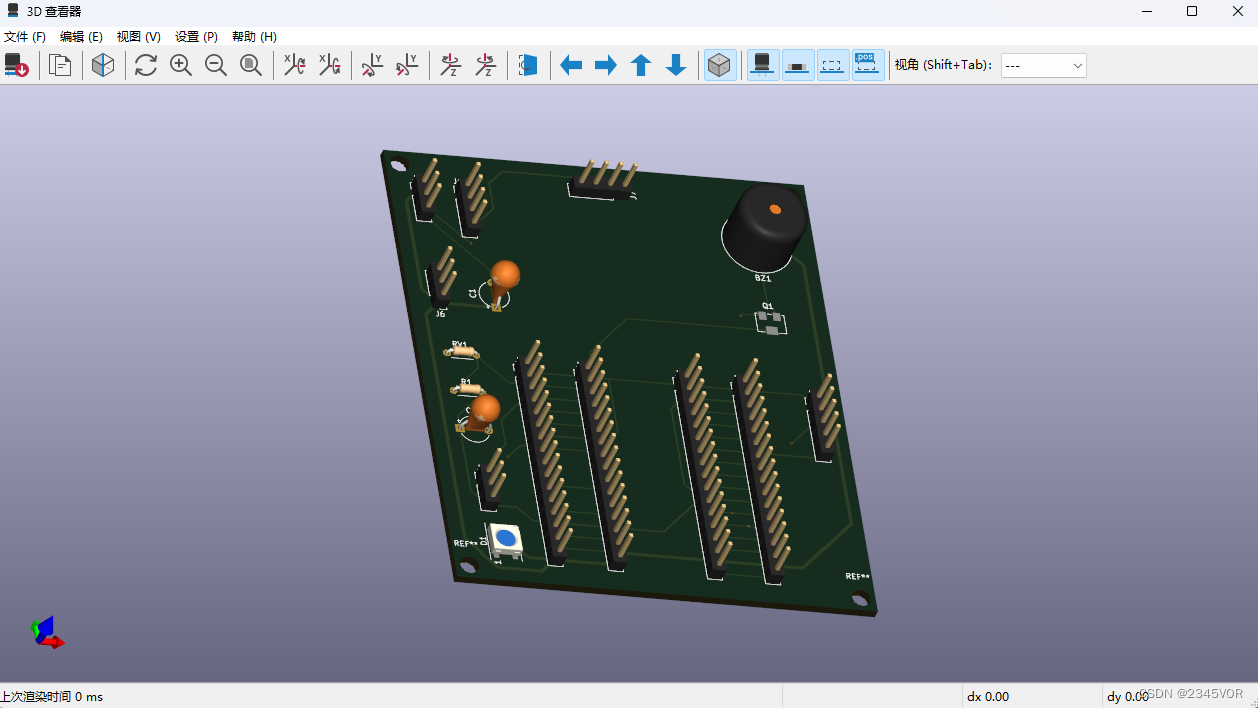
所选封装比较杂乱,偏向传统与现代工业融合
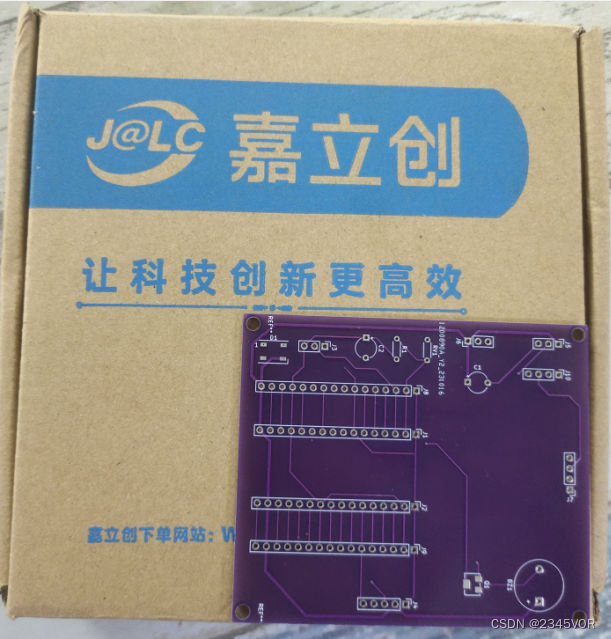
第一次下单 嘉立创返回说我没有阻焊层,修改ganber文件导出后,第二次下单工艺信息,大约5天左右就到啦!国产雄起

6.3 实物图
打板图
实物图
6.4 遇到的问题
1. 蜂鸣器驱动设计错误,解决办法:直接连接IO口,不过pwm控制效果区别不明显
2. WS2812封装对应错误,解决办法:选择引出的GPIO驱动,完美!
-
7. 关键代码及说明
总共迭代了四个版本
7.1 版本1.0
是通过ChatGPT生成的,然后结合自己开发的外设调试,搭建了基本框架,可以屏幕显示,有舵机、ws2812和ADC交互控制显示,需要安装以下5个库
- #include <U8g2lib.h>
- #include <Encoder.h>
- #include <ESP32Servo.h>
- #include <FastLED.h>
- #include <WS2812FX.h>
// #define ENCODER_DO_NOT_USE_INTERRUPTS
#include <U8g2lib.h>
#include <Encoder.h>
#include <ESP32Servo.h>
#include <FastLED.h>
#include <WS2812FX.h>
#define OLED_CLOCK 5
#define OLED_DATA 4
#define OLED_RESET U8X8_PIN_NONE
#define ENCODER_CLK 7
#define ENCODER_DT 6
#define ENCODER_SW 8
#define SERVO_PIN 19
#define LED_PIN 18
#define NUM_LEDS 4
#define SENSOR_PIN 0U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /* clock=*/OLED_CLOCK, /* data=*/OLED_DATA, /* reset=*/OLED_RESET); // ESP32 Thing, pure SW emulated I2C
Encoder encoder(ENCODER_CLK, ENCODER_DT);
// ESP32PWM pwm;
Servo myservo; // create servo object to control a servo
CRGB leds[NUM_LEDS];
int currentMenu = 0;
int servoAngle = 0;
int ledColorIndex = 0;
int sensorValue = 0;
int encoderButtonState = 0;
long position = 0;
long newPos = 0;void setup() {ESP32PWM::allocateTimer(0);ESP32PWM::allocateTimer(1);ESP32PWM::allocateTimer(2);ESP32PWM::allocateTimer(3);myservo.setPeriodHertz(50); // standard 50 hz servomyservo.attach(SERVO_PIN, 1000, 2000); // attaches the servo on pin 18 to the servo objectSerial.begin(9600);u8g2.begin();u8g2.setFont(u8g2_font_ncenB14_tr);pinMode(ENCODER_SW, INPUT_PULLUP);FastLED.addLeds<WS2812B, LED_PIN, GRB>(leds, NUM_LEDS);// pwm.setPeriodHertz(50);// pwm.attachServo(SERVO_PIN);
}void loop() {u8g2.clearBuffer();switch (currentMenu) {case 0: // Main menuu8g2.setCursor(0, 20);u8g2.print("1. Servo");u8g2.setCursor(0, 40);u8g2.print("2. WS2812");u8g2.setCursor(0, 60);u8g2.print("3. Sensor");break;case 1: // Servo menu// int servoencoderValue = 0;u8g2.setCursor(0, 20);u8g2.print("Servo Angle: ");u8g2.setCursor(30, 40);u8g2.print(servoAngle);// Handle servo controlservoAngle = servoAngle + checkencoder();if (servoAngle > 180) {servoAngle = 180;} else if (servoAngle < 0) {servoAngle = 0;}myservo.write(servoAngle);break;case 2: // WS2812 menu// int LEDencoderValue = 0;u8g2.setCursor(0, 20);u8g2.print("LED Color: ");u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);// Handle LED color controlledColorIndex = ledColorIndex + checkencoder();if (ledColorIndex < 0) {ledColorIndex = 0;} else if (ledColorIndex > 2) {ledColorIndex = 2;}setLedColor();break;case 3: // Sensor menuu8g2.setCursor(0, 20);u8g2.print("Sensor Value: ");u8g2.setCursor(30, 40);u8g2.print(sensorValue);// Read sensor valuesensorValue = analogRead(SENSOR_PIN);break;}u8g2.sendBuffer();// Handle menu navigationencoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {delay(50); // Debounce delayencoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {currentMenu++;if (currentMenu > 3) {currentMenu = 0;}delay(200); // Debounce delay}}
}
int checkencoder() {newPos = encoder.read();Serial.println("newPos:" + String(newPos) + "position:" + String(position));delay(1);if (newPos > position) {position = newPos;return 1;} else if (newPos < position) {position = newPos;return -1;}return 0;
}
void setLedColor() {switch (ledColorIndex) {case 0:leds[0] = CRGB::Red;leds[1] = CRGB::Red;leds[2] = CRGB::Red;leds[3] = CRGB::Red;break;case 1:leds[0] = CRGB::Green;leds[1] = CRGB::Green;leds[2] = CRGB::Green;leds[3] = CRGB::Green;break;case 2:leds[0] = CRGB::Blue;leds[1] = CRGB::Blue;leds[2] = CRGB::Blue;leds[3] = CRGB::Blue;break;}FastLED.show();
}
7.2 版本1.1
增加了蜂鸣器控制,设计四级菜单,WS2812由三种颜色怎加到10种,解决旋转编码器无法减法控制,添加按键返回功能
// #define ENCODER_DO_NOT_USE_INTERRUPTS
#include <U8g2lib.h>
#include <Encoder.h>
#include <ESP32Servo.h>
#include <FastLED.h>
#include <WS2812FX.h>
#define OLED_CLOCK 5
#define OLED_DATA 4
#define OLED_RESET U8X8_PIN_NONE
#define ENCODER_CLK 7
#define ENCODER_DT 6
#define ENCODER_SW 8
#define SERVO_PIN 19
#define LED_PIN 18
#define NUM_LEDS 4
#define SENSOR_PIN 0
#define SENSOR_PIN2 1
#define BUZZER 13U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /* clock=*/OLED_CLOCK, /* data=*/OLED_DATA, /* reset=*/OLED_RESET); // ESP32 Thing, pure SW emulated I2C
// 创建Encoder对象
Encoder myEncoder(ENCODER_CLK, ENCODER_DT);
// ESP32PWM pwm;
Servo myservo; // create servo object to control a servo
CRGB leds[NUM_LEDS];
int currentMenu = 0;
int servoAngle = 0;
int ledColorIndex = 0;
int sensorValue = 0;
int sensorValue2 = 0;
int BuzzerValue = 128;
int encoderButtonState = 0;
long position = 0;
long newPos = 0;
long oldPosition = 0;
int increment = 0;
int ws = 0;
void setup() {myservo.setPeriodHertz(50); // standard 50 hz servomyservo.attach(SERVO_PIN, 1000, 2000); // attaches the servo on pin 18 to the servo objectSerial.begin(9600);u8g2.begin();u8g2.setFont(u8g2_font_ncenB14_tr);pinMode(ENCODER_SW, INPUT_PULLUP);pinMode(ENCODER_CLK, INPUT_PULLUP);pinMode(ENCODER_DT, INPUT_PULLUP);pinMode(BUZZER, OUTPUT);FastLED.addLeds<WS2812, LED_PIN, GRB>(leds, NUM_LEDS);for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(-1);}FastLED.show();// pwm.setPeriodHertz(50);// pwm.attachServo(SERVO_PIN);
}void loop() {u8g2.clearBuffer();switch (currentMenu) {case 0: // Main menuu8g2.setCursor(30, 20);u8g2.print("Main menu");u8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(0, 40);u8g2.print("1. Servo");u8g2.setCursor(0, 60);u8g2.print("2. WS2812");u8g2.setCursor(64, 40);u8g2.print("3. Sensor");u8g2.setCursor(64, 60);u8g2.print("4. Buzzer");break;case 1: // Servo menu// int servoencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Servo Angle: ");u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();while (1) {if (checkencoder() == true) {setservo();increment = 0;}if (checkswitch() == true) {break;}}break;case 2: // WS2812 menu// int LEDencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("LED Color: ");u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();// Handle LED color controlwhile (1) {if (checkencoder() == true) {setLedColor();increment = 0;}if (checkswitch() == true) {break;}}break;case 3: // Sensor menuu8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(10, 30);u8g2.print("Sensor1: ");u8g2.setCursor(64, 30);u8g2.print(sensorValue);u8g2.setCursor(10, 60);u8g2.print("Sensor2: ");u8g2.setCursor(64, 60);u8g2.print(sensorValue2);// Read sensor valuesensorValue = analogRead(SENSOR_PIN);sensorValue2 = analogRead(SENSOR_PIN2);break;case 4: // Buzzer menuu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Buzzer Value: ");u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);// Handle Buzzer controlwhile (1) {if (checkencoder() == true) {setbuzzer();increment = 0;}if (checkswitch() == true) {break;}}break;}increment = 0;u8g2.sendBuffer();// Handle menu navigationif (checkswitch() == true) {currentMenu++;if (currentMenu > 4) {currentMenu = 0;}delay(200); // Debounce delay}
}
bool checkencoder() {long newPosition = myEncoder.read();if (newPosition != oldPosition) {// Serial.println(newPosition + String(";") + oldPosition);increment = newPosition - oldPosition;oldPosition = newPosition;return true;}return false;
}
bool checkswitch() {encoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {delay(50); // Debounce delayencoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {return true;} else {return false;}} else {return false;}
}
void setLedColor() {ledColorIndex = ledColorIndex + increment;if (ledColorIndex < 0) {ledColorIndex = 0;} else if (ledColorIndex > 10) {ledColorIndex = 10;}u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(ledColorIndex);}FastLED.show();delay(1);
}
void setservo() {servoAngle = servoAngle + increment*3;if (servoAngle > 180) {servoAngle = 180;} else if (servoAngle < 0) {servoAngle = 0;}u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();myservo.write(servoAngle);
}void setbuzzer() {BuzzerValue = BuzzerValue + increment*8;if (BuzzerValue > 255) {BuzzerValue = 255;} else if (BuzzerValue < 0) {BuzzerValue = 0;}u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);u8g2.sendBuffer();analogWrite(BUZZER, BuzzerValue);
}CRGB getColor(int index) {switch (index) {case 0:return CRGB::Red;case 1:return CRGB::Green;case 2:return CRGB::Blue;case 3:return CRGB::Yellow;case 4:return CRGB::Magenta;case 5:return CRGB::Cyan;case 6:return CRGB::White;case 7:return CRGB::Purple;case 8:return CRGB::Orange;case 9:return CRGB::Pink;default:return CRGB::Black;}
}
7.3 版本1.2
增加了蓝牙交互,设计五级菜单,通过蓝牙上传设备状态信息,并且可接收手机端数据,但未完成控制设备。值得注意这个版本最稳定
// #define ENCODER_DO_NOT_USE_INTERRUPTS
#include <U8g2lib.h>
#include <Encoder.h>
#include <ESP32Servo.h>
#include <FastLED.h>
#include <WS2812FX.h>
#include <BLEDevice.h>
#include <BLEServer.h>
#include <BLEUtils.h>
#include <BLE2902.h>
#define OLED_CLOCK 5
#define OLED_DATA 4
#define OLED_RESET U8X8_PIN_NONE
#define ENCODER_CLK 7
#define ENCODER_DT 6
#define ENCODER_SW 8
#define SERVO_PIN 19
#define LED_PIN 18
#define NUM_LEDS 4
#define SENSOR_PIN 0
#define SENSOR_PIN2 1
#define BUZZER 13
#define SERVICE_UUID "6E400001-B5A3-F393-E0A9-E50E24DCCA9E" // UART service UUID
#define CHARACTERISTIC_UUID_RX "6E400002-B5A3-F393-E0A9-E50E24DCCA9E"
#define CHARACTERISTIC_UUID_TX "6E400003-B5A3-F393-E0A9-E50E24DCCA9E"
//创建Bluetooth对象
BLECharacteristic *pCharacteristic;
//创建SSD1306屏幕对象
U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /* clock=*/OLED_CLOCK, /* data=*/OLED_DATA, /* reset=*/OLED_RESET); // ESP32 Thing, pure SW emulated I2C
// 创建Encoder对象
Encoder myEncoder(ENCODER_CLK, ENCODER_DT);
// ESP32PWM pwm;
Servo myservo; // create servo object to control a servo
CRGB leds[NUM_LEDS];
int currentMenu = 0;
int servoAngle = 0;
int ledColorIndex = 0;
int sensorValue = 0;
int sensorValue2 = 0;
int BuzzerValue = 128;
int encoderButtonState = 0;
long position = 0;
long newPos = 0;
long oldPosition = 0;
int increment = 0;
bool deviceConnected = false;
char BLEbuf[256] = { 0 };
uint32_t cnt = 0;
String message_c;
char *message;
// const char *message1;
class MyServerCallbacks : public BLEServerCallbacks {void onConnect(BLEServer *pServer) {deviceConnected = true;};void onDisconnect(BLEServer *pServer) {deviceConnected = false;}
};class MyCallbacks : public BLECharacteristicCallbacks {void onWrite(BLECharacteristic *pCharacteristic) {std::string rxValue = pCharacteristic->getValue();if (rxValue.length() > 0) {Serial.print("------>Received Value: ");for (int i = 0; i < rxValue.length(); i++) {Serial.print(rxValue[i]);}Serial.println();}}
};void setup() {myservo.setPeriodHertz(50); // standard 50 hz servomyservo.attach(SERVO_PIN, 1000, 2000); // attaches the servo on pin 18 to the servo objectSerial.begin(115200);u8g2.begin();u8g2.clearDisplay();pinMode(ENCODER_SW, INPUT_PULLUP);pinMode(ENCODER_CLK, INPUT_PULLUP);pinMode(ENCODER_DT, INPUT_PULLUP);pinMode(BUZZER, OUTPUT);FastLED.addLeds<WS2812, LED_PIN, GRB>(leds, NUM_LEDS);for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(-1);}FastLED.show();// Create the BLE DeviceBLEDevice::init("ESP32 BLE vor");// 创建蓝牙服务器BLEServer *pServer = BLEDevice::createServer();pServer->setCallbacks(new MyServerCallbacks());// // 创建广播服务的UUIDBLEService *pService = pServer->createService(SERVICE_UUID);// 创建广播服务的UUIDpCharacteristic = pService->createCharacteristic(CHARACTERISTIC_UUID_TX, BLECharacteristic::PROPERTY_NOTIFY);pCharacteristic->addDescriptor(new BLE2902());BLECharacteristic *pCharacteristic = pService->createCharacteristic(CHARACTERISTIC_UUID_RX, BLECharacteristic::PROPERTY_WRITE);pCharacteristic->setCallbacks(new MyCallbacks());// 开始蓝牙服务pService->start();// 开始广播pServer->getAdvertising()->start();Serial.println("Waiting a client connection to notify...");
}void loop() {u8g2.clearBuffer();switch (currentMenu) {case 0: // Main menuu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(7, 22);u8g2.print("Main menu");u8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(0, 40);u8g2.print("1. Servo");u8g2.setCursor(0, 60);u8g2.print("2. WS2812");u8g2.setCursor(64, 40);u8g2.print("3. Sensor");u8g2.setCursor(64, 60);u8g2.print("4. Buzzer");break;case 1: // Servo menu// int servoencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Servo Angle: ");u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();while (1) {if (checkencoder() == true) {setservo();increment = 0;}if (checkswitch() == true) {break;}}break;case 2: // WS2812 menu// int LEDencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("LED Color: ");u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();// Handle LED color controlwhile (1) {if (checkencoder() == true) {setLedColor();increment = 0;}if (checkswitch() == true) {break;}}break;case 3: // Sensor menuu8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(10, 30);u8g2.print("Sensor1: ");u8g2.setCursor(64, 30);u8g2.print(sensorValue);u8g2.setCursor(10, 60);u8g2.print("Sensor2: ");u8g2.setCursor(64, 60);u8g2.print(sensorValue2);// Read sensor valuesensorValue = analogRead(SENSOR_PIN);sensorValue2 = analogRead(SENSOR_PIN2);break;case 4: // Buzzer menuu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Buzzer Value: ");u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);// Handle Buzzer controlwhile (1) {if (checkencoder() == true) {setbuzzer();increment = 0;}if (checkswitch() == true) {break;}}break;case 5: // Blue uartu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Blue uart : ");u8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(0, 40);u8g2.print(BuzzerValue);// Handle Buzzer controlwhile (1) {setbluetooth();if (checkswitch() == true) {break;}}break;default:break;}increment = 0;u8g2.sendBuffer();// Handle menu navigationif (checkswitch() == true) {currentMenu++;if (currentMenu > 5) {currentMenu = 0;}delay(200); // Debounce delay}
}
bool checkencoder() {long newPosition = myEncoder.read();if (newPosition != oldPosition) {// Serial.println(newPosition + String(";") + oldPosition);increment = newPosition - oldPosition;oldPosition = newPosition;return true;}return false;
}
bool checkswitch() {encoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {delay(50); // Debounce delayencoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {return true;} else {return false;}} else {return false;}
}
void setLedColor() {ledColorIndex = ledColorIndex + increment;if (ledColorIndex < 0) {ledColorIndex = 0;} else if (ledColorIndex > 10) {ledColorIndex = 10;}u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(ledColorIndex);}FastLED.show();delay(1);
}
void setservo() {servoAngle = servoAngle + increment * 3;if (servoAngle > 180) {servoAngle = 180;} else if (servoAngle < 0) {servoAngle = 0;}u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();myservo.write(servoAngle);
}void setbuzzer() {BuzzerValue = BuzzerValue + increment * 8;if (BuzzerValue > 255) {BuzzerValue = 255;} else if (BuzzerValue < 0) {BuzzerValue = 0;}u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);u8g2.sendBuffer();analogWrite(BUZZER, BuzzerValue);
}void setbluetooth() {if (deviceConnected) { //设备连接后,每秒钟发送txValue。memset(BLEbuf, 0, 32);message_c = "s "+String(servoAngle)+" w"+String(ledColorIndex)+" s"+String(analogRead(SENSOR_PIN))+"s"+String(analogRead(SENSOR_PIN2))+"b"+String(BuzzerValue)+"\n";char* p = const_cast<char*>(message_c.c_str());memcpy(BLEbuf, p, 32);pCharacteristic->setValue(BLEbuf);pCharacteristic->notify(); // Send the value to the app!Serial.print("*** Sent Value: ");Serial.print(BLEbuf);Serial.println(" ***");// sensorValue = analogRead(SENSOR_PIN);// sensorValue2 = analogRead(SENSOR_PIN2);// memset(BLEbuf, 0, 256);// // sprintf(message, "S%dW%dS%dS%dB%d", servoAngle, ledColorIndex, sensorValue, sensorValue2, BuzzerValue);// sprintf(message, "S%dW%d", servoAngle, ledColorIndex);// // message_c = message;// // char* p = const_cast<char*>(message.c_str());// // message1 = message;// memcpy(BLEbuf, message, 256);// // memcpy(BLEbuf, message_c, 32);// pCharacteristic->setValue(BLEbuf);// pCharacteristic->notify(); // Send the value to the app!// delay(10);u8g2.setCursor(0, 40);u8g2.print(BLEbuf);// // u8g2.setCursor(0, 60);// // u8g2.print(message_c.substring(15, 32));u8g2.sendBuffer();// Serial.println("Sent Value:" + String(BLEbuf));delay(100);}
}CRGB getColor(int index) {switch (index) {case 0:return CRGB::Red;case 1:return CRGB::Green;case 2:return CRGB::Blue;case 3:return CRGB::Yellow;case 4:return CRGB::Magenta;case 5:return CRGB::Cyan;case 6:return CRGB::White;case 7:return CRGB::Purple;case 8:return CRGB::Orange;case 9:return CRGB::Pink;default:return CRGB::Black;}
}
7.4 版本1.3
设计了两个线程,完成了实时的蓝牙交互,不过ws2812控制不稳定。推荐版本1.2
// #define ENCODER_DO_NOT_USE_INTERRUPTS
#include <U8g2lib.h>
#include <Encoder.h>
#include <ESP32Servo.h>
#include <FastLED.h>
#include <WS2812FX.h>
#include <BLEDevice.h>
#include <BLEServer.h>
#include <BLEUtils.h>
#include <BLE2902.h>
#define OLED_CLOCK 5
#define OLED_DATA 4
#define OLED_RESET U8X8_PIN_NONE
#define ENCODER_CLK 7
#define ENCODER_DT 6
#define ENCODER_SW 8
#define SERVO_PIN 19
#define LED_PIN 18
#define NUM_LEDS 4
#define SENSOR_PIN 0
#define SENSOR_PIN2 1
#define BUZZER 13
#define SERVICE_UUID "6E400001-B5A3-F393-E0A9-E50E24DCCA9E" // UART service UUID
#define CHARACTERISTIC_UUID_RX "6E400002-B5A3-F393-E0A9-E50E24DCCA9E"
#define CHARACTERISTIC_UUID_TX "6E400003-B5A3-F393-E0A9-E50E24DCCA9E"
//创建Bluetooth对象
BLECharacteristic *pCharacteristic;
//创建SSD1306屏幕对象
U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /* clock=*/OLED_CLOCK, /* data=*/OLED_DATA, /* reset=*/OLED_RESET); // ESP32 Thing, pure SW emulated I2C
// 创建Encoder对象
Encoder myEncoder(ENCODER_CLK, ENCODER_DT);
// ESP32PWM pwm;
Servo myservo; // create servo object to control a servo
CRGB leds[NUM_LEDS];
int currentMenu = 0;
int servoAngle = 0;
int ledColorIndex = 0;
int sensorValue = 0;
int sensorValue2 = 0;
int BuzzerValue = 128;
int encoderButtonState = 0;
long position = 0;
long newPos = 0;
long oldPosition = 0;
int increment = 0;
bool deviceConnected = false;
char BLEbuf[256] = { 0 };
uint32_t cnt = 0;
String message_c;
char *message;
// const char *message1;
class MyServerCallbacks : public BLEServerCallbacks {void onConnect(BLEServer *pServer) {deviceConnected = true;};void onDisconnect(BLEServer *pServer) {deviceConnected = false;}
};class MyCallbacks : public BLECharacteristicCallbacks {void onWrite(BLECharacteristic *pCharacteristic) {std::string rxValue = pCharacteristic->getValue();if (rxValue.length() > 0) {Serial.print("------>Received Value: ");for (int i = 0; i < rxValue.length(); i++) {Serial.print(rxValue[i]);}Serial.println();}}
};void appCpuLoop(void *pvParameters) {while (true) {if (currentMenu != 5) {memset(BLEbuf, 0, 32);message_c = "s " + String(servoAngle) + "w" + String(ledColorIndex) + " s" + String(analogRead(SENSOR_PIN)) + "s" + String(analogRead(SENSOR_PIN2)) + "b" + String(BuzzerValue) + "\r\n";char *p = const_cast<char *>(message_c.c_str());memcpy(BLEbuf, p, 32);pCharacteristic->setValue(BLEbuf);pCharacteristic->notify(); // Send the value to the app!Serial.print("*** Sent Value: ");Serial.print(BLEbuf);Serial.println(" ***");delay(700);}delay(300);}vTaskDelete(NULL);
}void setup() {myservo.setPeriodHertz(50); // standard 50 hz servomyservo.attach(SERVO_PIN, 1000, 2000); // attaches the servo on pin 18 to the servo objectSerial.begin(115200);u8g2.begin();u8g2.clearDisplay();pinMode(ENCODER_SW, INPUT_PULLUP);pinMode(ENCODER_CLK, INPUT_PULLUP);pinMode(ENCODER_DT, INPUT_PULLUP);pinMode(BUZZER, OUTPUT);FastLED.addLeds<WS2812, LED_PIN, GRB>(leds, NUM_LEDS);for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(-1);}FastLED.show();// Create the BLE DeviceBLEDevice::init("ESP32 BLE vor");// 创建蓝牙服务器BLEServer *pServer = BLEDevice::createServer();pServer->setCallbacks(new MyServerCallbacks());// // 创建广播服务的UUIDBLEService *pService = pServer->createService(SERVICE_UUID);// 创建广播服务的UUIDpCharacteristic = pService->createCharacteristic(CHARACTERISTIC_UUID_TX, BLECharacteristic::PROPERTY_NOTIFY);pCharacteristic->addDescriptor(new BLE2902());BLECharacteristic *pCharacteristic = pService->createCharacteristic(CHARACTERISTIC_UUID_RX, BLECharacteristic::PROPERTY_WRITE);pCharacteristic->setCallbacks(new MyCallbacks());// 开始蓝牙服务pService->start();// 开始广播pServer->getAdvertising()->start();Serial.println("Waiting a client connection to notify...");xTaskCreatePinnedToCore(appCpuLoop, //具体实现的函数"APP_CPU_LOOP", //任务名称8192, //堆栈大小NULL, //输入参数1, //任务优先级NULL, //1 //核心 0\1);
}void loop() {u8g2.clearBuffer();switch (currentMenu) {case 0: // Main menuu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(7, 22);u8g2.print("Main menu");u8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(0, 40);u8g2.print("1. Servo");u8g2.setCursor(0, 60);u8g2.print("2. WS2812");u8g2.setCursor(64, 40);u8g2.print("3. Sensor");u8g2.setCursor(64, 60);u8g2.print("4. Buzzer");break;case 1: // Servo menu// int servoencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Servo Angle: ");u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();while (1) {if (checkencoder() == true) {setservo();increment = 0;}if (checkswitch() == true) {break;}}break;case 2: // WS2812 menu// int LEDencoderValue = 0;u8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("LED Color: ");u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();// Handle LED color controlwhile (1) {if (checkencoder() == true) {setLedColor();increment = 0;}if (checkswitch() == true) {break;}}break;case 3: // Sensor menuu8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(10, 30);u8g2.print("Sensor1: ");u8g2.setCursor(64, 30);u8g2.print(sensorValue);u8g2.setCursor(10, 60);u8g2.print("Sensor2: ");u8g2.setCursor(64, 60);u8g2.print(sensorValue2);// Read sensor valuesensorValue = analogRead(SENSOR_PIN);sensorValue2 = analogRead(SENSOR_PIN2);break;case 4: // Buzzer menuu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Buzzer Value: ");u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);// Handle Buzzer controlwhile (1) {if (checkencoder() == true) {setbuzzer();increment = 0;}if (checkswitch() == true) {break;}}break;case 5: // Blue uartu8g2.setFont(u8g2_font_ncenB14_tr);u8g2.setCursor(0, 20);u8g2.print("Blue uart : ");u8g2.setFont(u8g2_font_ncenB08_tr);u8g2.setCursor(0, 40);u8g2.print(BuzzerValue);// Handle Buzzer controlwhile (1) {setbluetooth();if (checkswitch() == true) {break;}}break;default:break;}increment = 0;u8g2.sendBuffer();// Handle menu navigationif (checkswitch() == true) {currentMenu++;if (currentMenu > 5) {currentMenu = 0;}delay(200); // Debounce delay}
}
bool checkencoder() {long newPosition = myEncoder.read();if (newPosition != oldPosition) {// Serial.println(newPosition + String(";") + oldPosition);increment = newPosition - oldPosition;oldPosition = newPosition;return true;}return false;
}
bool checkswitch() {encoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {delay(50); // Debounce delayencoderButtonState = digitalRead(ENCODER_SW);if (encoderButtonState == LOW) {return true;} else {return false;}} else {return false;}
}
void setLedColor() {ledColorIndex = ledColorIndex + increment;if (ledColorIndex < 0) {ledColorIndex = 0;} else if (ledColorIndex > 10) {ledColorIndex = 10;}u8g2.setCursor(30, 40);u8g2.print(ledColorIndex);u8g2.sendBuffer();for (int i = 0; i < NUM_LEDS; i++) {leds[i] = getColor(ledColorIndex);}FastLED.show();delay(1);
}
void setservo() {servoAngle = servoAngle + increment * 3;if (servoAngle > 180) {servoAngle = 180;} else if (servoAngle < 0) {servoAngle = 0;}u8g2.setCursor(30, 40);u8g2.print(servoAngle);u8g2.sendBuffer();myservo.write(servoAngle);
}void setbuzzer() {BuzzerValue = BuzzerValue + increment * 8;if (BuzzerValue > 255) {BuzzerValue = 255;} else if (BuzzerValue < 0) {BuzzerValue = 0;}u8g2.setCursor(30, 40);u8g2.print(BuzzerValue);u8g2.sendBuffer();analogWrite(BUZZER, BuzzerValue);
}void setbluetooth() {if (deviceConnected) { //设备连接后,每秒钟发送txValue。memset(BLEbuf, 0, 32);message_c = "s " + String(servoAngle) + "w" + String(ledColorIndex) + " s" + String(analogRead(SENSOR_PIN)) + "s" + String(analogRead(SENSOR_PIN2)) + "b" + String(BuzzerValue) + "\r\n";char *p = const_cast<char *>(message_c.c_str());memcpy(BLEbuf, p, 32);pCharacteristic->setValue(BLEbuf);pCharacteristic->notify(); // Send the value to the app!Serial.print("*** Sent Value: ");Serial.print(BLEbuf);Serial.println(" ***");// sensorValue = analogRead(SENSOR_PIN);// sensorValue2 = analogRead(SENSOR_PIN2);// memset(BLEbuf, 0, 256);// // sprintf(message, "S%dW%dS%dS%dB%d", servoAngle, ledColorIndex, sensorValue, sensorValue2, BuzzerValue);// sprintf(message, "S%dW%d", servoAngle, ledColorIndex);// // message_c = message;// // char* p = const_cast<char*>(message.c_str());// // message1 = message;// memcpy(BLEbuf, message, 256);// // memcpy(BLEbuf, message_c, 32);// pCharacteristic->setValue(BLEbuf);// pCharacteristic->notify(); // Send the value to the app!// delay(10);u8g2.setCursor(0, 40);u8g2.print(BLEbuf);// // u8g2.setCursor(0, 60);// // u8g2.print(message_c.substring(15, 32));u8g2.sendBuffer();// Serial.println("Sent Value:" + String(BLEbuf));delay(100);}
}CRGB getColor(int index) {switch (index) {case 0:return CRGB::Red;case 1:return CRGB::Green;case 2:return CRGB::Blue;case 3:return CRGB::Yellow;case 4:return CRGB::Magenta;case 5:return CRGB::Cyan;case 6:return CRGB::White;case 7:return CRGB::Purple;case 8:return CRGB::Orange;case 9:return CRGB::Pink;default:return CRGB::Black;}
}
-
8. 功能展示及说明
8.1 主菜单显示
主菜单显示,所有设备初始化,舵机归位,灯灭,蜂鸣器静音
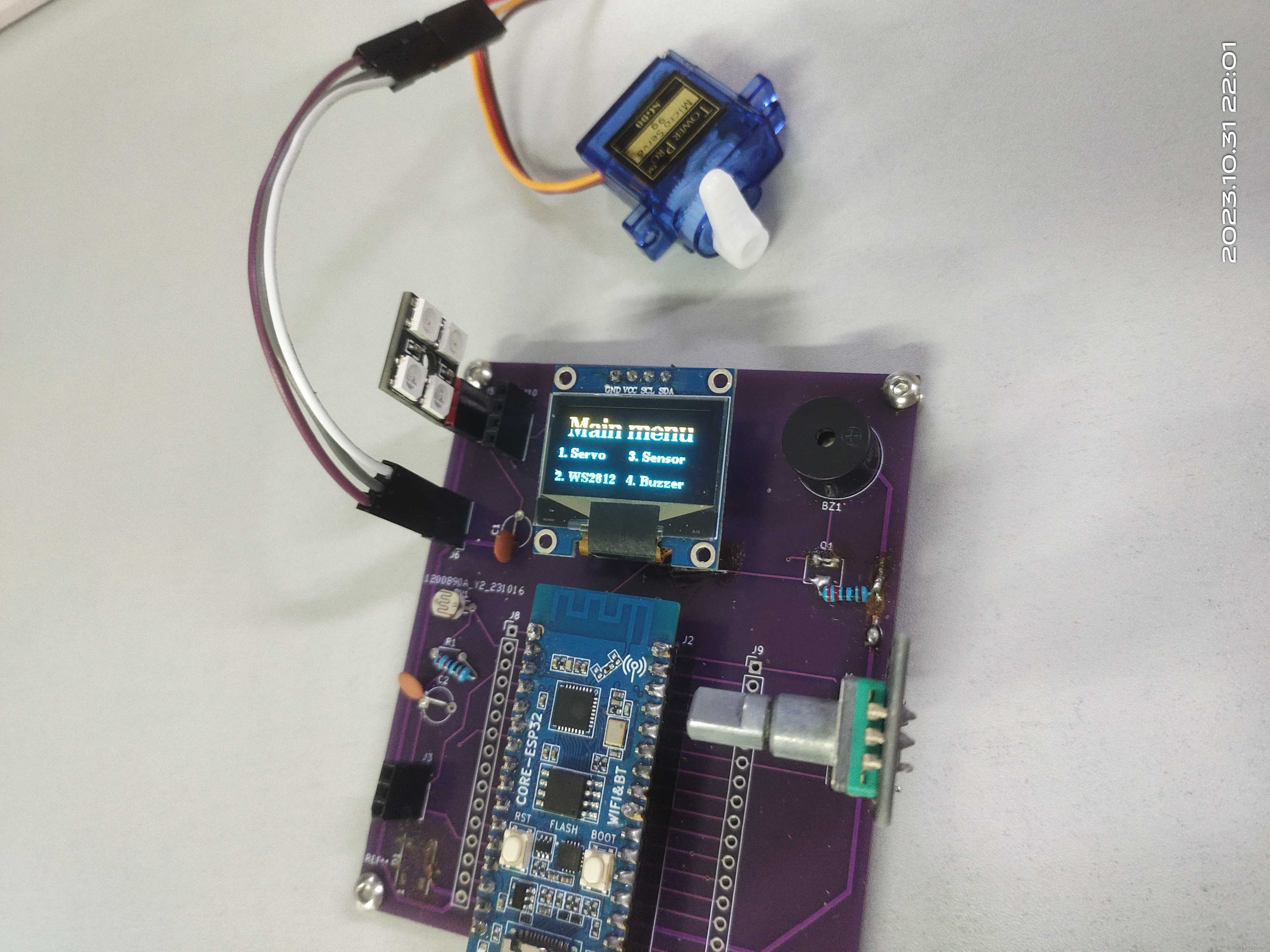
8.2 舵机控制
舵机显示60度位置,屏幕同步数值
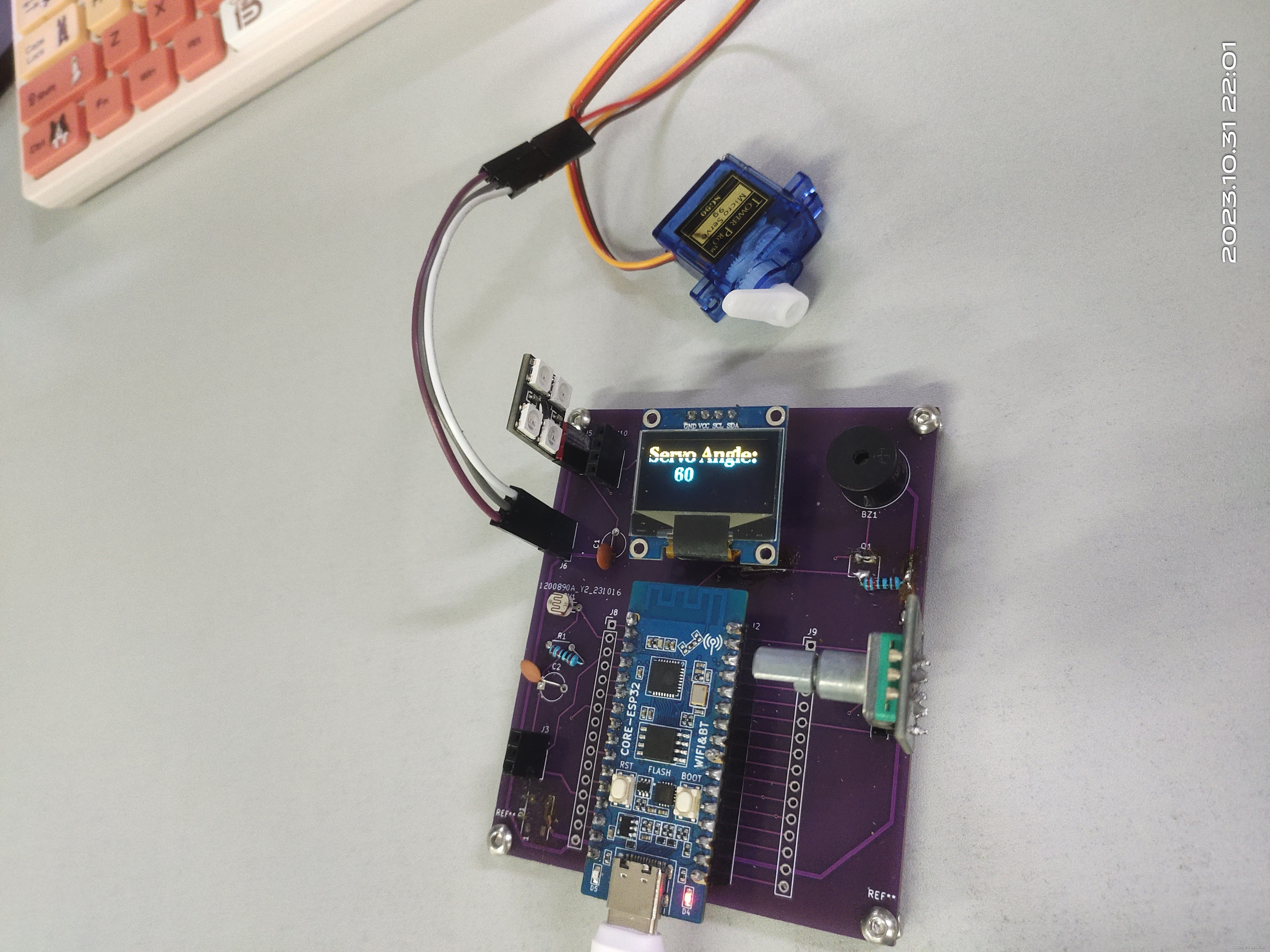
8.3 WS2812控制
WS2812显示蓝色灯,屏幕同步数值
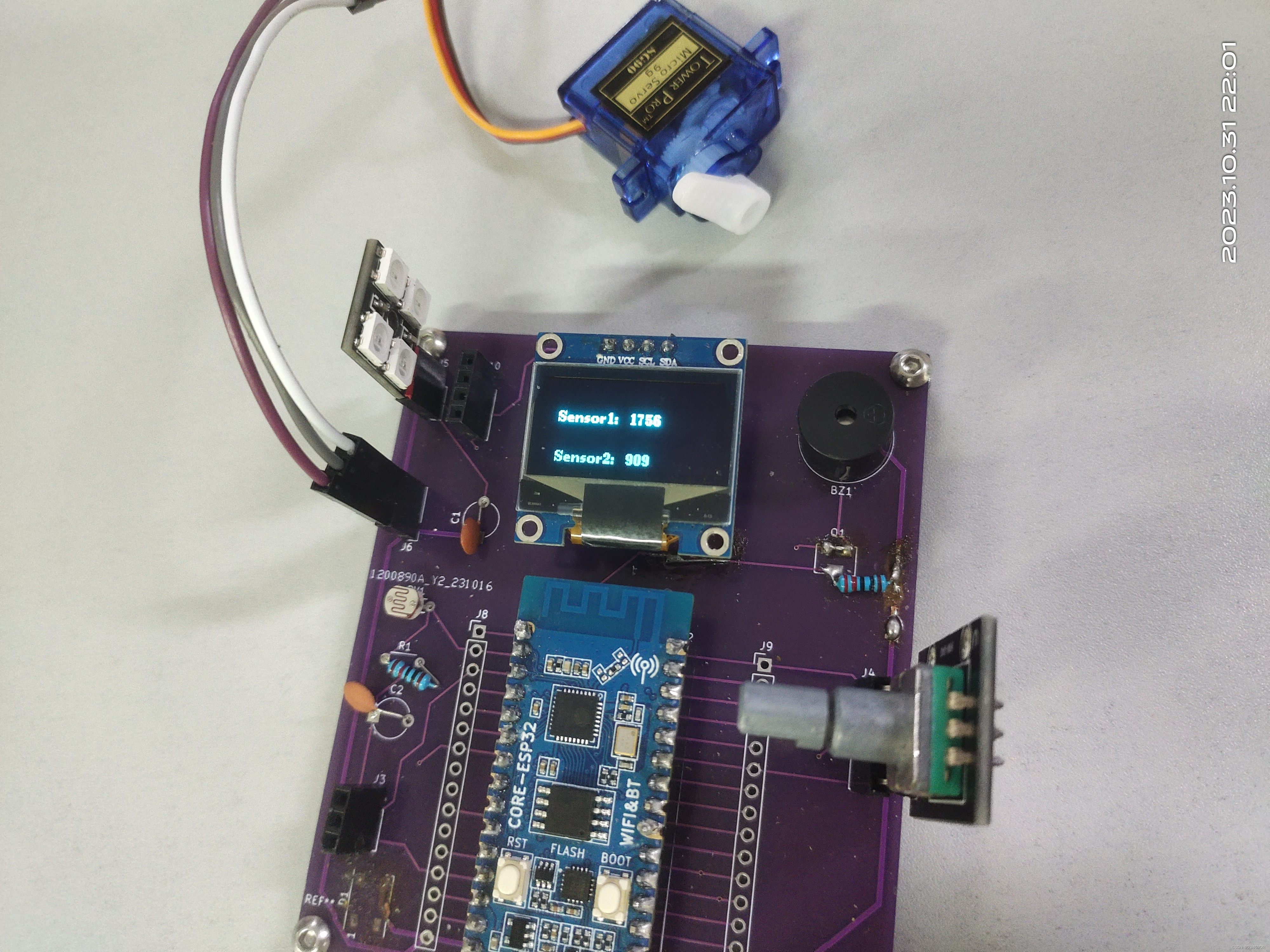
8.4 ADC读取
实时读取光敏ADC,屏幕同步数值
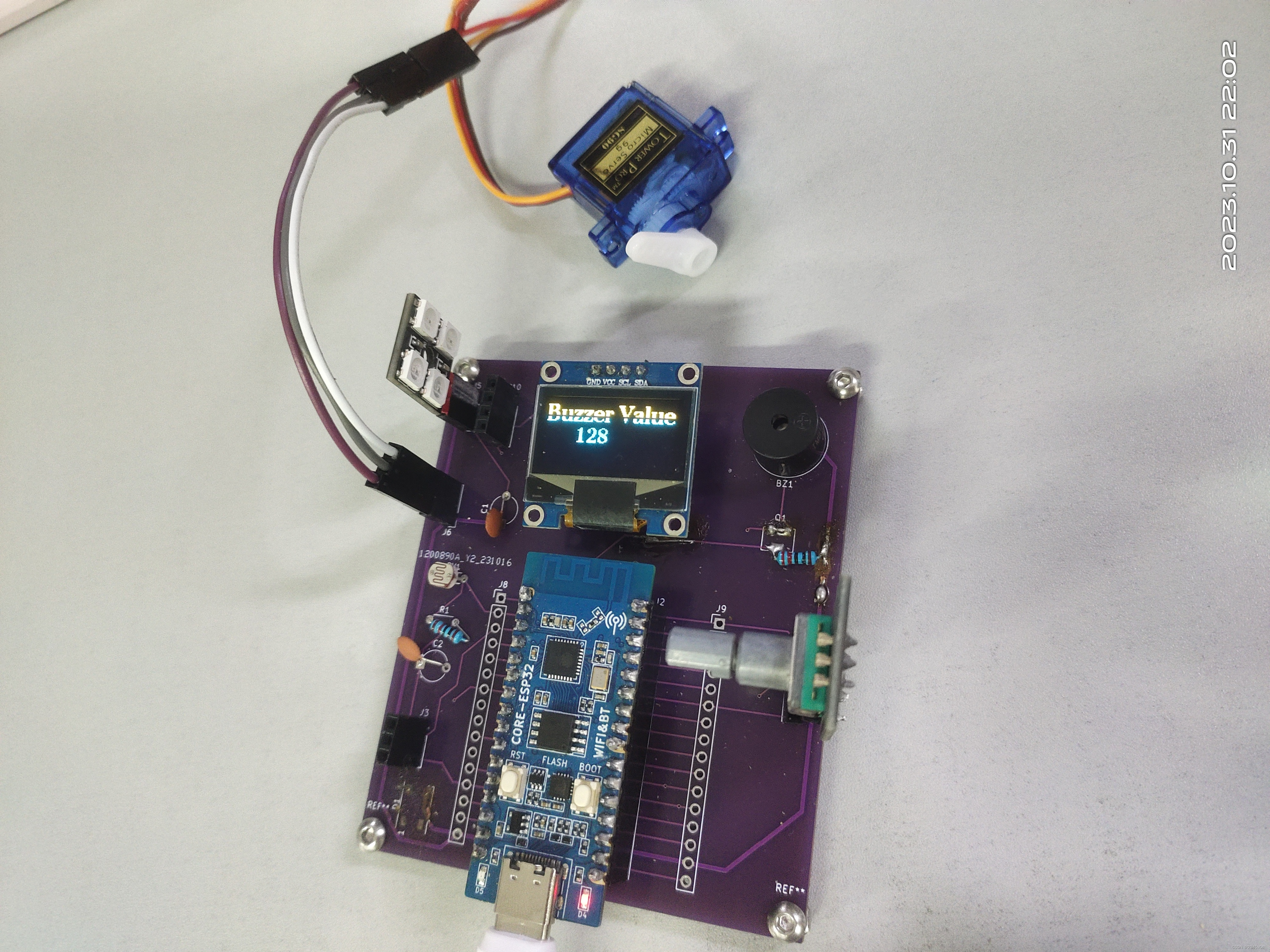
8.5 蜂鸣器PWM
蜂鸣器输出PWM,屏幕同步数值
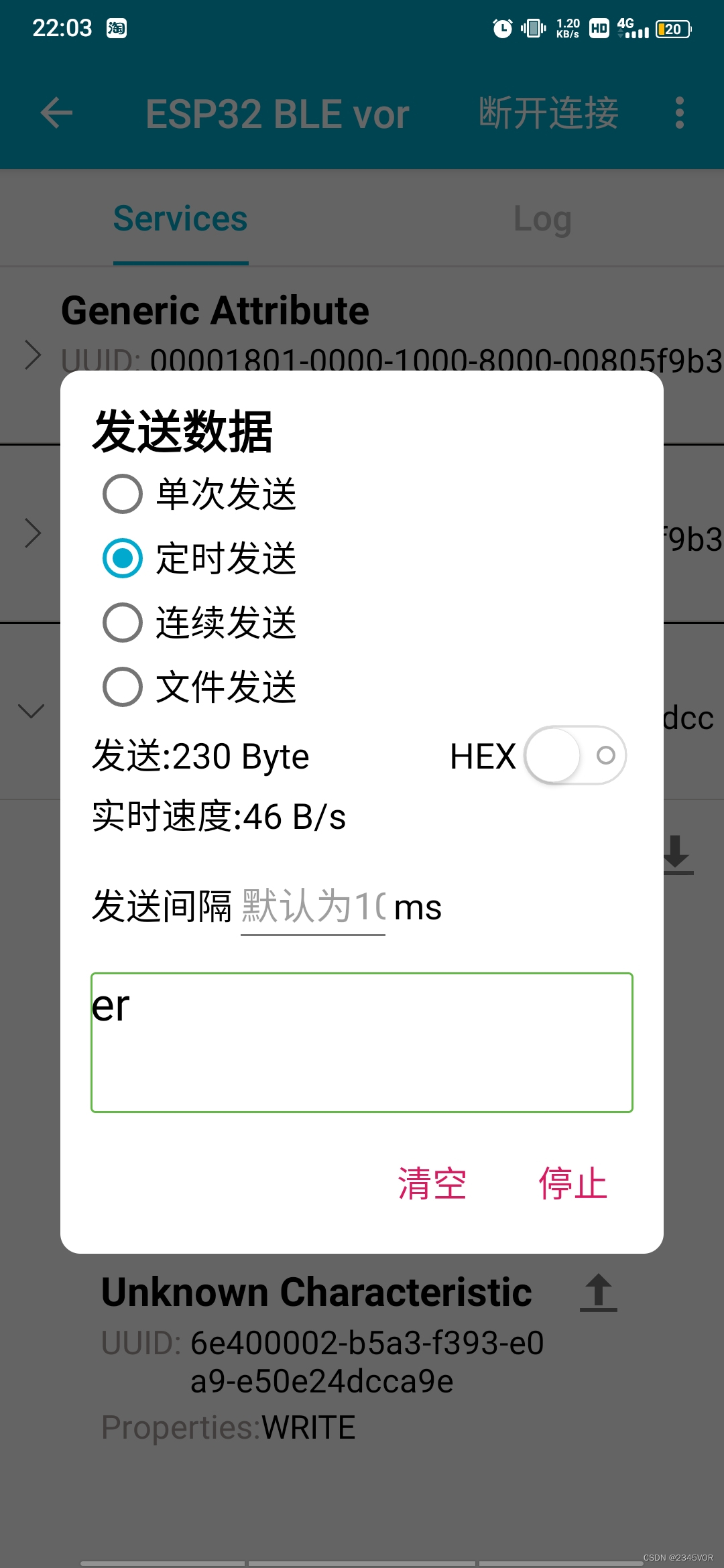
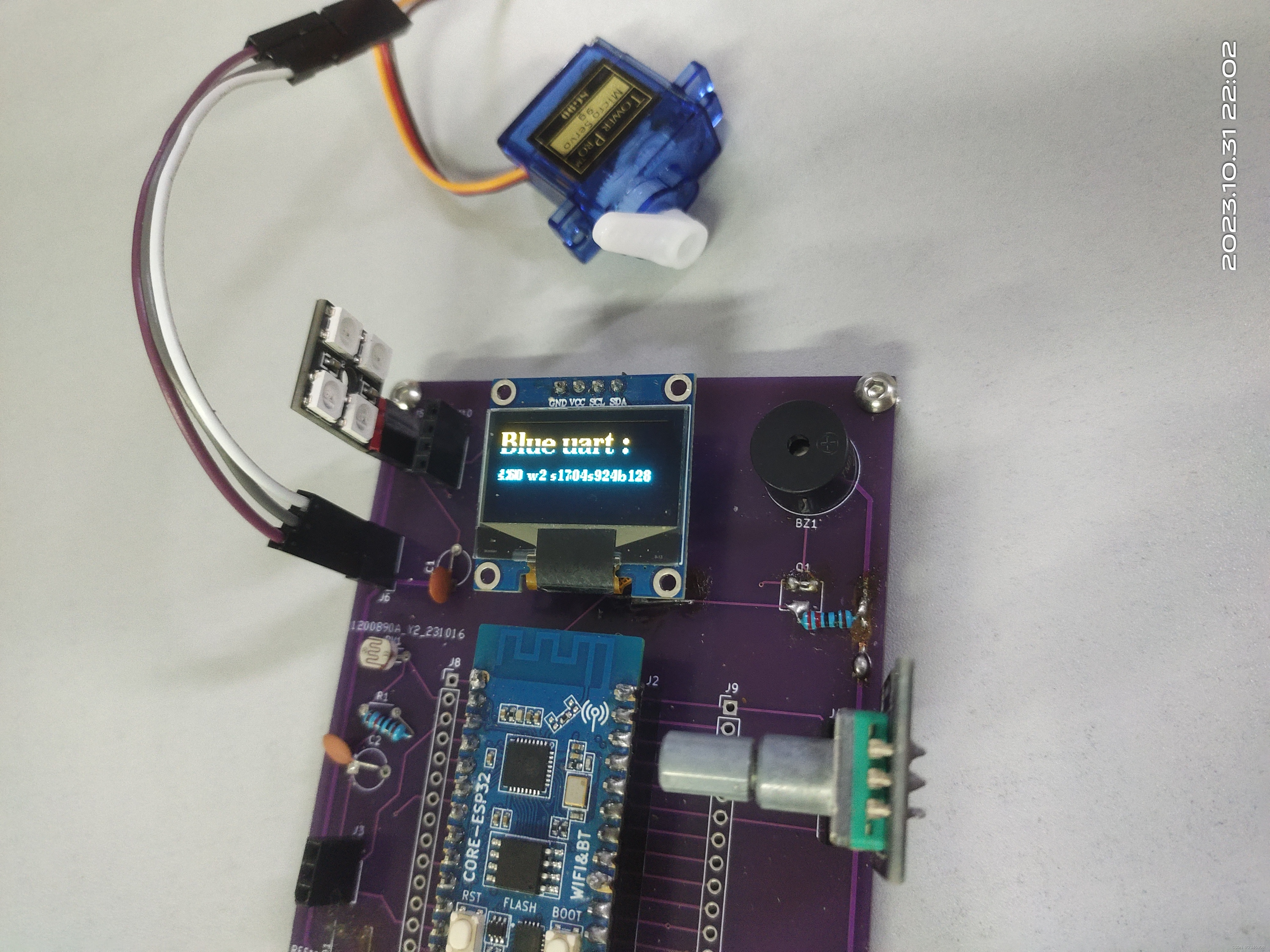
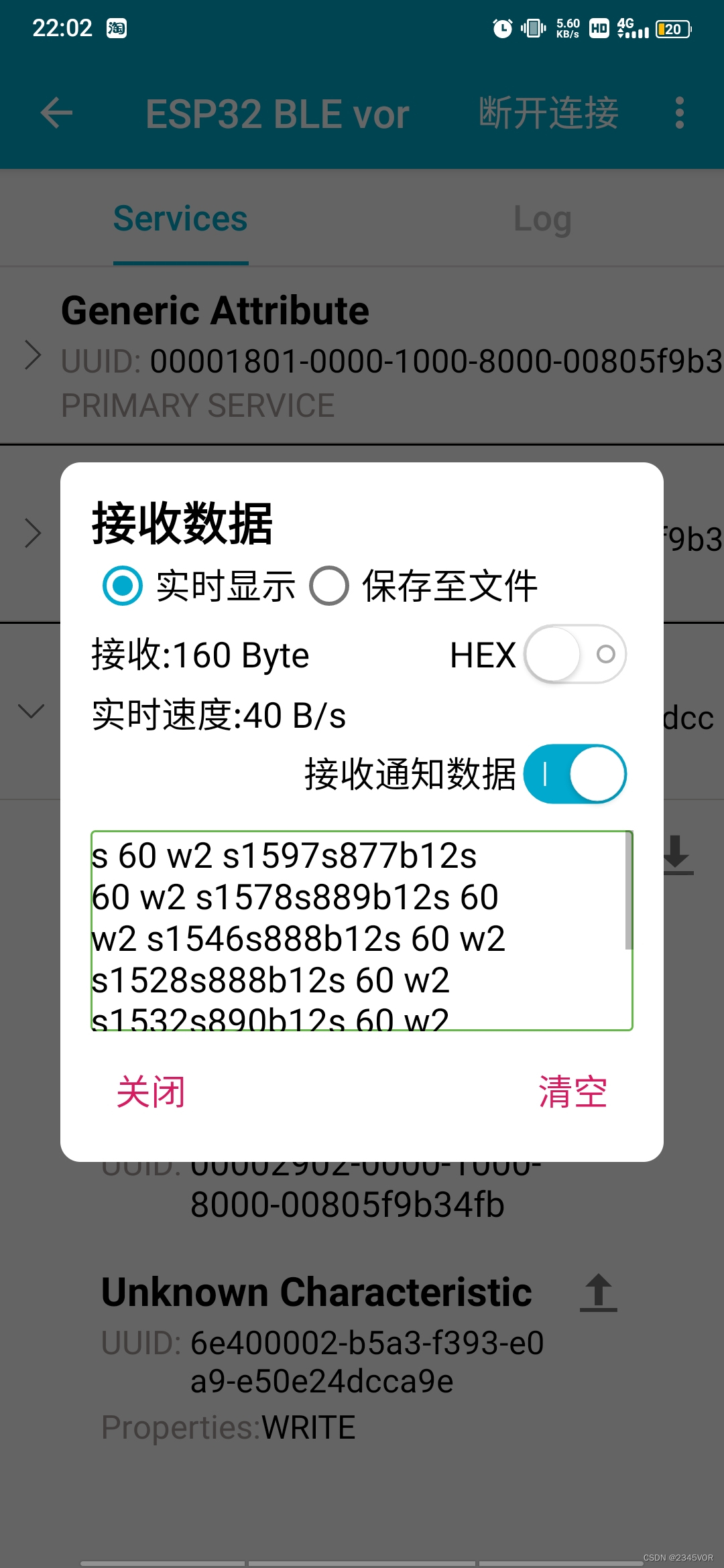
8.6 蓝牙交互
手机连接ESP32 BLE vor蓝牙,发送数据
屏幕读取状态
手机实时接收设备信息
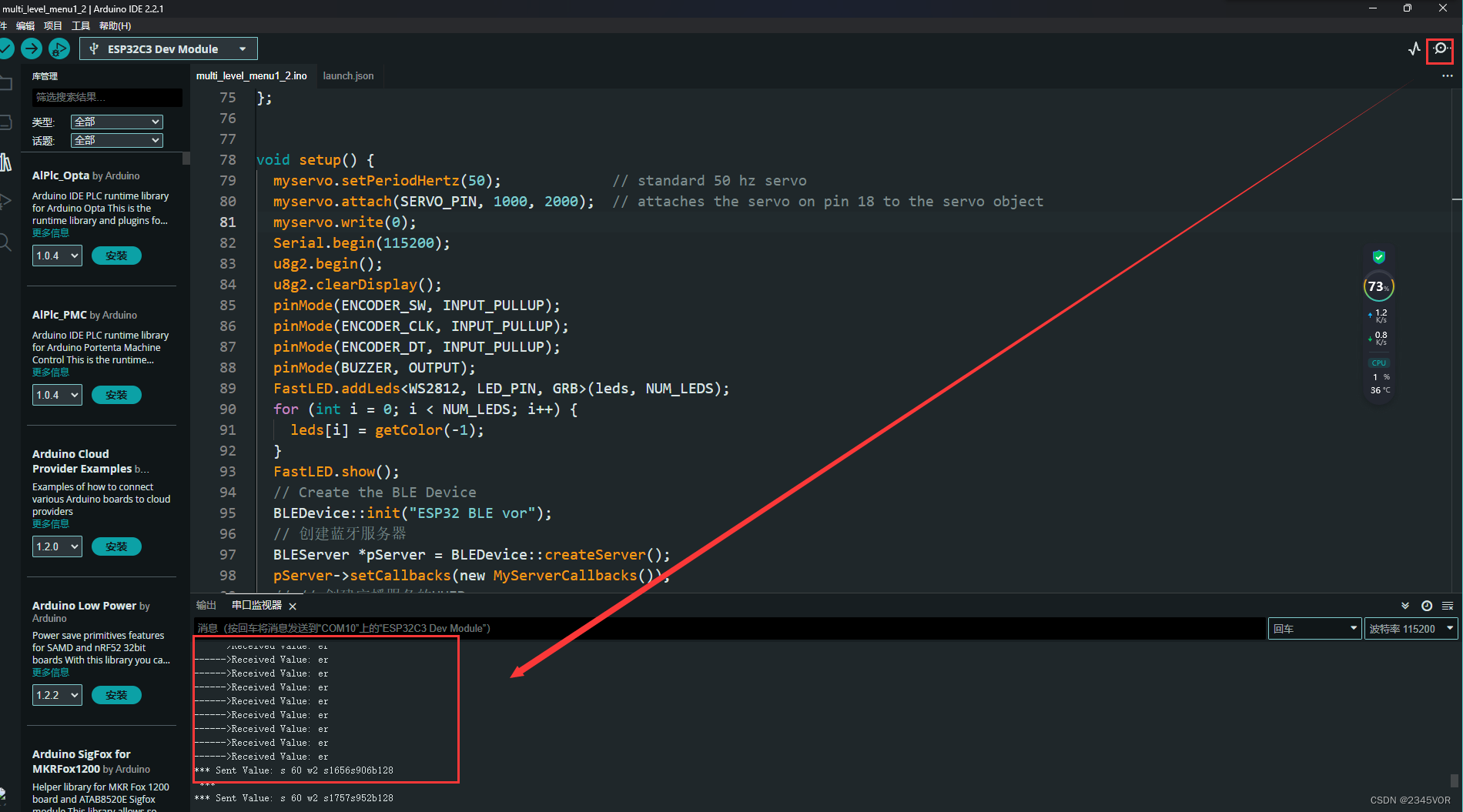
电脑串口显示设备状态和接收手机数据
-
9总结
这是我第四次参加嵌入式相关的网上比赛活动
- 第一次是RT-Thread的【基于RT-Thread+RA6M4的智能鱼缸系统设计之鱼我所欲也】活动,作品是2022年暑假做的获得第六名,还是比较开心!
- 第二次2023年寒假做的是【基于MAX7800羽毛板语音控制ESP8266小车】,成绩还没有出来,第七名。
- 第三次2023年春做的【基于腾讯云的CH32V307开发板远程机械臂小车】,由于图床引用CSDN导致最后评审没有显示出来,最后获得安慰奖
这次最大的收获是第一次实现了PCB板设计、制作和调试全流程,加深了对手机蓝牙双向通信,对esp32国产单片机更有信心!
这次最大的遗憾是没有加入蓝牙控制程序,相信大家自己解决哒。
建议:
- 希望得捷电子优化国内访问网站浏览和提高scheme-it工具设计水平;
- 期待硬禾联合各大平台推出更多有质量有意义持续性的创客活动!
非常感谢硬禾联合得捷电子官方组织的FastBond2活动,大家都为这个国内嵌入式生态出一份力,只要努力认真做了都会有所收获,期盼这些作品在将来某一天为构建美好未来贡献一份微博之力!
我后期会持续更新我测评的一系列国内开发板测评,并且作为宣传大使努力鼓励大家有所获参加有质量的硬禾活动🛹🛹🛹每天都一点点结合实际需求联动丰富生活,从而实现对外部世界进行充分的感知,尽最大努力认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。🤣🤣🤣
🥳🥳🥳再次非常感谢硬禾的Lucia支持等等🥳🥳🥳期待这一次的成绩哟!
参考文献:
FastBond2阶段1——基于ESP32C3开发的简易IO调试设备 - 电子森林 (eetree.cn)
【esp32c3配置arduino IDE教程】-CSDN博客
【Arduino环境下驱动合宙esp32c3单片机基本外设】-CSDN博客
这篇关于FastBond2阶段2——基于ESP32C3开发的简易IO调试设备的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








