本文主要是介绍(27)Linux信号的产生核心转储---初步认识信号,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、信号入门
1. 生活角度的信号
- 你在网上买了很多件商品,再等待不同商品快递的到来。但即便快递没有到来,你也知道快递来临时, 你该怎么处理快递。也就是你能“识别快递”
- 当快递员到了你楼下,你也收到快递到来的通知,但是你正在打游戏,需5min之后才能去取快递。那 么在在这5min之内,你并没有下去去取快递,但是你是知道有快递到来了。也就是取快递的行为并不 是一定要立即执行,可以理解成“在合适的时候去取”。
- 在收到通知,再到你拿到快递期间,是有一个时间窗口的,在这段时间,你并没有拿到快递,但是你知 道有一个快递已经来了。本质上是你“记住了有一个快递要去取”
- 当你时间合适,顺利拿到快递之后,就要开始处理快递了。而处理快递一般方式有三种:1. 执行默认动 作(幸福的打开快递,使用商品)2. 执行自定义动作(快递是零食,你要送给你你的女朋友)3. 忽略快 递(快递拿上来之后,扔掉床头,继续开一把游戏)
- 快递到来的整个过程,对你来讲是异步的,你不能准确断定快递员什么时候给你打电话
2. 技术应用角度的信号
1. 用户输入命令,在Shell下启动一个前台进程。 . 用户按下Ctrl-C ,这个键盘输入产生一个硬件中断,被OS获取,解释成信号,发送给目标前台进程 . 前台进程因为收到信号,进而引起进程退出
//signal.cc
#include<iostream>
using namespace std;int main()
{while(1){cout<<"I am a process! I am waiting signal"<<endl;}return 0;
} 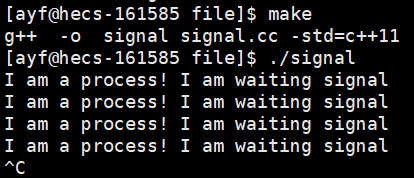
- 请将生活例子和 Ctrl-C 信号处理过程相结合,解释一下信号处理过程
- 进程就是你,操作系统就是快递员,信号就是快递
3. 注意
- 1. Ctrl-C 产生的信号只能发给前台进程。一个命令后面加个&可以放到后台运行,这样Shell不必等待进程 结束就可以接受新的命令,启动新的进程。
- 2. Shell可以同时运行一个前台进程和任意多个后台进程,只有前台进程才能接到像 Ctrl-C 这种控制键产生 的信号。
- 3. 前台进程在运行过程中用户随时可能按下 Ctrl-C 而产生一个信号,也就是说该进程的用户空间代码执行 到任何地方都有可能收到 SIGINT 信号而终止,所以信号相对于进程的控制流程来说是异步 (Asynchronous)的。
4. 信号概念
信号是进程之间事件异步通知的一种方式,属于软中断。
- 进程之所以能够识别信号,是因为程序员将对应的信号种类和逻辑已经写好了的。
- 当信号发给进程后,进程不一定要立刻去处理,可能有更加紧急的任务,会在合适的时候去处理。
- 进程收到信号到处理信号之前会有一个窗口期,这个期间要将收到的信号进行保存。
- 处理信号的方式有三种:默认动作,自定义动作,忽略。

我们学习信号是学习它的整个生命周期,按照时间轴,分为信号产生,信号保存,信号处理。但是在这之前先需要学习一些预备知识。
进程能够识别的信号是已经写好的,它有62个:
kill -l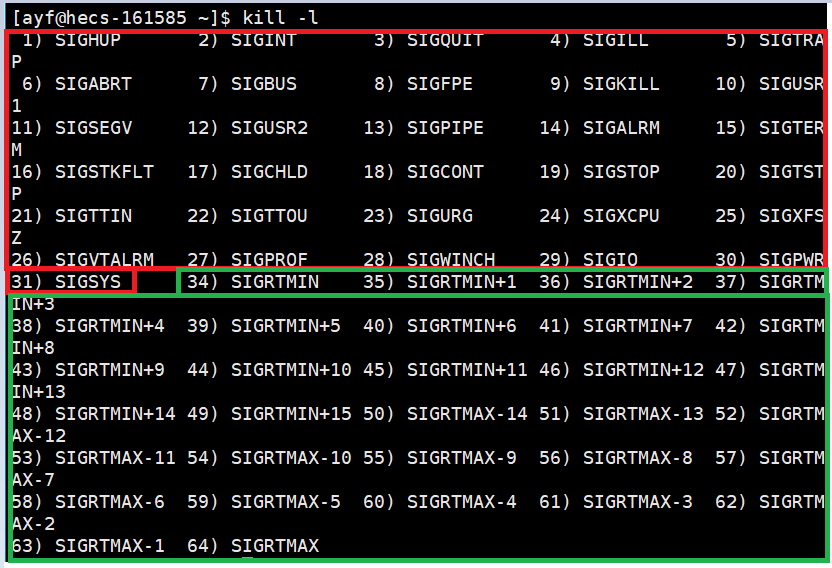
- 红色框中的是普通信号,编号从1-31。
- 绿色框中的是实时信号,编号从34-64。
这其中没有32号和33号信号,所以一共有62个信号。而且这里我们只学习普通信号,对实时信号暂不做研究。
在使用这些信号时,可以用信号名,也可以用信号编号,它是一样的,都是宏定义后的结果。
根据我们对Linux的了解,信号存放在哪里呢?既然信号是给进程的,而进程是通过内核数据结构来管理的,所以我们可以推断出,信号放在进程的task_struct结构体中。
既然它是在PCB中,而且数量是31个,task_struct中必定不会设置31个变量来存放信号,数组还有可能,但是信号的状态只分为有和没有两种,所以再次推断,31个信号放在一个32位的整形变量中,每个比特位代表一个信号。
就像在学习基础IO和进程间通信的时候,那些flags标志中的不同的比特位代表着不同的意义,这31个信号量也是这种方式:
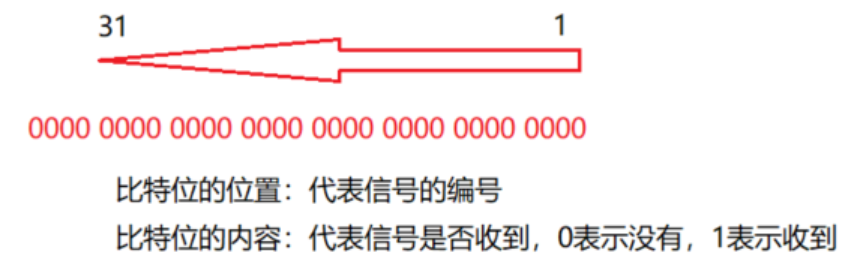
具体的保存细节后面本喵再详细讲解。
问题来了,内核数据结构的修改,这个工作是由谁来完成的?毫无疑问是操作系统,因为task_struct就是它维护的,而且是存在于内存中的,只有操作系统才有权力去修改它,用户是无法直接操作的,因为操作系统不相信任何人。
所以说,无论哪个信号,最后的本质都是由操作系统发生给进程的,这里的发送本质就是在修改task_struct中存放信号那个变量的比特位。
5.信号处理方法的注册
所谓的注册,就是告诉操作系统,当某个进程接收到某个信号后的处理方式。
既然是告诉操作系统,那么肯定会用到系统调用,该系统调用的名字是signal():

int signal:要注册的信号编号
sighandler_t handler:自定义的函数指针可以将信号的处理方式写成一个函数,然后将函数名传递个signal,此时当进程接收到signum指定的信号编号时,就会执行我们定义的函数。
void handler(int signo)
{cout<<"进程接收到的一个信号,编号:"<<signo<<endl;
}
#include<iostream>
#include<unistd.h>
#include<signal.h>
using namespace std;void handler(int signo)
{cout<<"进程接收到的一个信号,编号:"<<signo<<endl;
}int main()
{signal(2,handler);int count=0;while(1){cout<<"I am a process! I am waiting signal"<<count++<<endl;sleep(1);}return 0;
}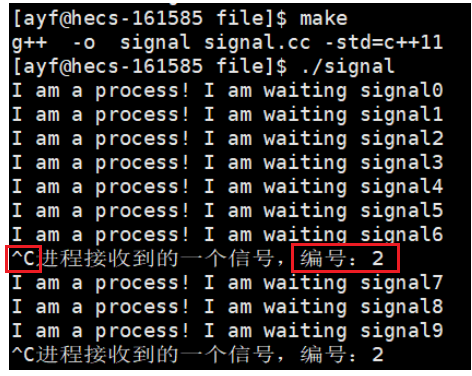
运行起来后发现,按上ctrl+c后,进程不会结束了。
- 2号信号SIGINT的默认处理方式就是结束进程。
- 我们自定义的处理方式中并没有结束进程,所以进程在收到2号进程后打印了一句话。
所有信号的默认处理方式都是结束进程,只是不同的信号代表的意义不一样。
二、信号的产生
1. 通过终端按键产生信号
SIGINT的默认处理动作是终止进程,SIGQUIT的默认处理动作是终止进程并且Core Dump,现在我们来验证一 下。
#include<iostream>
#include<unistd.h>
#include<signal.h>
using namespace std;int signo_arr[2]={2,3};
void handler(int signo)
{cout<<"进程接收到的一个信号,编号:"<<signo<<endl;
}int main()
{for(auto& signo:signo_arr){signal(signo,handler);}int count=0;while(1){cout<<"I am a process! I am waiting signal "<<count++<<endl;sleep(1);}return 0;
} 
可以看到通过键盘产生了2号和3号信号。
2、调用系统调用向进程发信号
系统调用kill():

- pid_t pid:要给发信号的pid
- int sig:要发送的信号编号
- 返回值:发送成功返回0,失败返回-1
该系统调用是一个进程给另一个进程发送指定信号,可以向任意进程发送任意信号。
信号接收端:
//mytest.cc
#include<iostream>
#include<unistd.h>
#include<signal.h>
#include<string.h>
using namespace std;int main()
{while(1){cout<<"我是一个正在运行的进程pid:"<<getpid()<<endl;sleep(2);}return 0;
}信号发送端:
//mysignal.cc
#include<iostream>
#include<unistd.h>
#include<signal.h>
#include<string.h>
using namespace std;int signo_arr[2]={2,3};
void handler(int signo)
{cout<<"进程接收到的一个信号,编号:"<<signo<<endl;
}
void Usage(const string& proc)
{//cout<<"Usage: "<<proc<<"signo pid: "<<endl;
}int main(int argc,char* argv[])
{if(argc!=3){Usage(argv[0]);exit(1);}int signo=atoi(argv[1]);pid_t pid=atoi(argv[2]);int ret=kill(pid,signo);if(ret!=0){cerr<<errno<<":"<<strerror(errno)<<endl;exit(2);}return 0;
}这是一个带有命令行参数的程序,输入的选项中的pid值和信号编号,在程序中在调用kill系统调用向指定pid的进程发送指定信号。
运行结果:

左边在执行mysginal的时候,输入对应的信号编号和pid,右边正在运行的进程就会接收到指定的信号而停止运行。
系统调用raise():

int sig:要发送的信号
返回值:发送成功返回0,失败返回-1该系统调用是由进程自己调用,也就是进程自己可以给自己发送任意信号。

通过命令行参数指定信号,在程序执行5秒钟后给自己发送该信号。
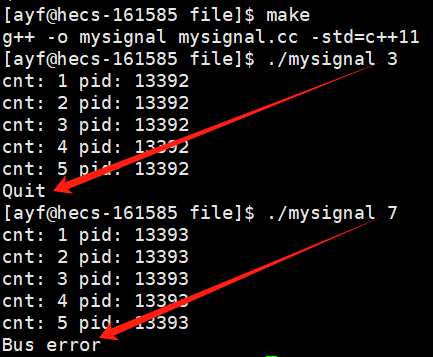
无论命令行输入哪个信号的编号,在5秒钟后,该进程都会给自己发送输入的信号,让进程结束。
系统调用abort():
没有参数,没有返回值
该系统调用只能给自己发送指定的信号,该信号是SIGABRT,信号编号是6。
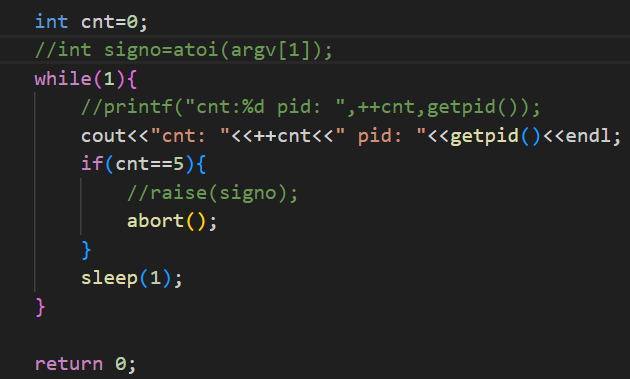
运行结果:

在运行5秒钟后,该进程接收到了6号信号SIGABRT。
虽然有3个系统调用来产生信号,但是归根到底都是在使用kill系统调用。
- kill()可以给任意进程发送任意信号。
- raise()可以给自己发送任意信号。
//raise本质
kill(getpid(),signo);
abort()可以给自己发送SIGABRT信号。
//abort本质
kill(getpid(),SIGABRT);
3、硬件异常产生信号
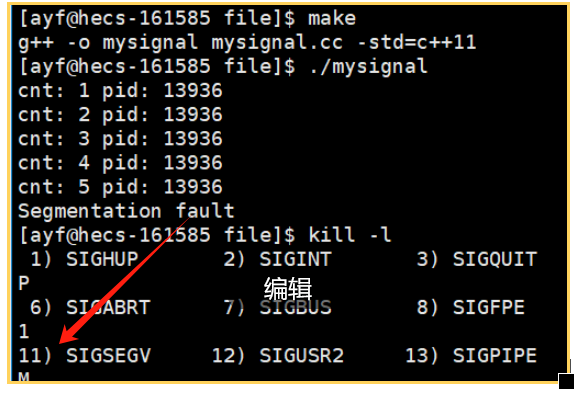
除0操作导致的硬件异常:
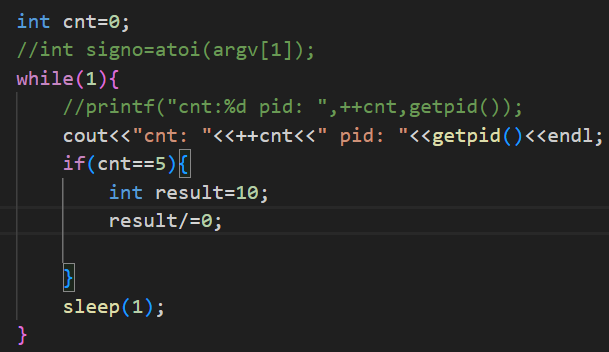
在这段代码中,有除0操作,我们知道,除0得到的是无穷大的数,所以在编程的时候是不允许出现的。

- 在运行的时候,直接出错,没有再执行下去,是因为接收到了信号。
- 接收到的信号是SIGFPE信号,编号为8号。
这其实就是一种硬件异常产生的信号。

- CPU中有很多的寄存器,例如eax,ebx,eip等等。
CPU会从内存中将代码中的变量拿到寄存器中进行运算,如果有必要,还会将运算的结果放回到内存中。
- 还有一个状态寄存器,如果CPU在运算的时候发现了除0操作,就会将状态寄存器的溢出标志位置一。
此时就意味着硬件产生了异常。而操作系统是一个进行软硬件资源管理的软件,CPU的中状态寄存器的溢出标志位置一后,操作系统可以第一时间拿到。
除0导致硬件异常以后,操作系统会给对应的进程发送SIGFPE信号。
当进程接收到SIGFPE信号以后,默认的处理方式就是结束进程。
现在我们对这个SIGFPE信号注册一个自定义处理方式:
只打印接收到的信号编号,进程不退出。

在进程运行起来后,怎么就开始鞭尸了呢?也就是这个信号被操作系统不停的发送给这个进程。
- 进程收到信号后进程不退出,随着CPU时间片的轮转就会再次被调到。
- CPU中只有一份寄存器,但是寄存器中的内容属于当前进程的上下文。
- 当进程被切换的时候,就有无数次的状态寄存器被保存和恢复的过程。
- 而除0操作导致的溢出标志位置一的数据还会被恢复到CPU中。
- 所以每一次恢复的时候,操作系统就会识别到,并且给对应进程发送SIGFPE信号。
所以就会导致上面不停调用自定义处理函数,不停打印接收到的信号编号。
解引用空指针导致的硬件异常:
- 运行的时候直接出错,没有再运行下去,也是因为接收到了信号。
- 接收到的信号是SIGSEGV,编号是11。
这同样是一种硬件异常产生的信号。

- 我们之前一直谈论的页表时间上是页表+MMU,而MMU是在CPU中的,未来简便,我们就只说页表。
- 进程地址空间和物理内存之间的映射关系实际上是有MMU去完成映射的。
- 当对空指针解引用的时候,MMU会拒绝这种操作,从而产生异常标志。
- 操作系统拿到MMU产生的异常以后就会给对应的进程发送SIGSEGV信号。
当进程接收到编号为11的SIGSEGV信号以后,默认的处理动作就是结束进程。
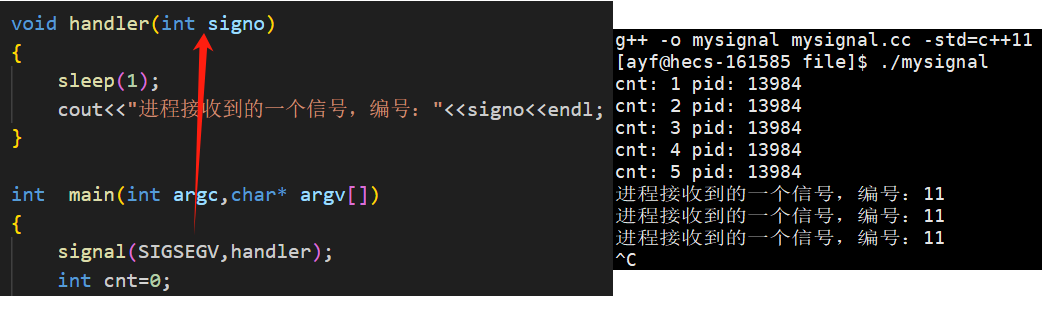
将这个信号注册自定义处理方式,同样打印接收到的信号编号,但是不结束进程,可以看到,和除0操作一样,也是在鞭尸,不停的打印。
- 硬件异常所产生的信号,如果不结束这个进程,我们是没有能力去处理这个进程的。
- 随着时间片的轮转,这个导致硬件异常的进程还会不停的调到,所以操作系统会不停的向进程发送信号。
- 硬件异常产生的信号并不会显示发送,而是由操作系统自动发送的。
4、由软件条件产生信号
读端关闭触发的信号:
比如在学习匿名管道的时候,当读端关闭的时候,写端所在进程就会收到编号为13的SIGPIPE信号结束进程。
#include<iostream>
#include<unistd.h>
#include<signal.h>
#include<string.h>
#include<stdlib.h>
#include<error.h>
using namespace std;int signo_arr[2]={2,3};void handler(int signo)
{sleep(1);cout<<"进程接收到的一个信号,编号:"<<signo<<endl;
}int main(int argc,char* argv[])
{int fds[2];int ret=pipe(fds);if(ret==-1){cerr<<errno<<":"<<strerror(errno)<<endl;exit(1);}pid_t id=fork();int cnt=0;if(id==0){close(fds[1]);while(1){char* msg[1024];ssize_t ret=read(fds[0],msg,sizeof(msg)-1);printf("我是子进程,pid:%d,receive data:%s\n",getpid(),msg);if(++cnt==5){//5s后关闭读端close(fds[0]);cout<<"读端关闭"<<endl;}sleep(1);}}signal(SIGPIPE,handler);//自定义处理方式close(fds[0]);const char* buffer="I am 子进程";while(1){ssize_t ret=write(fds[1],buffer,strlen(buffer));cout<<"我是父进程,我正在运行,pid: "<<getpid()<<endl;sleep(1);}return 0;
}运行结果:
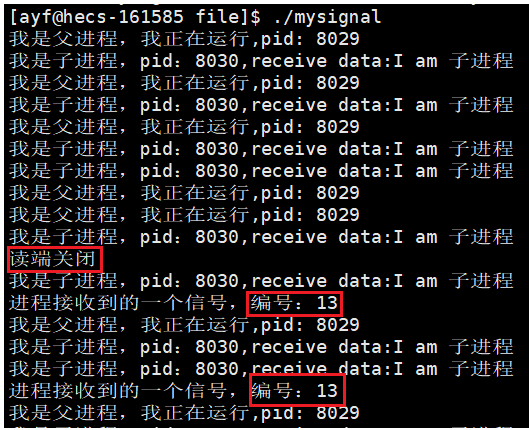
在读端关闭以后,写端的自定义处理方式中就接收到了系统发给的SIGPIPE信号,编号为13。
- 读端是否关闭是软件中的条件。
- 当条件达成以后,产生信号。
闹钟触发的信号:
闹钟就是系统中的定时器,使用的时候同样需要通过系统调用实现:

- 参数:要定的时长。
- 返回值:距离定的时间还差多少。
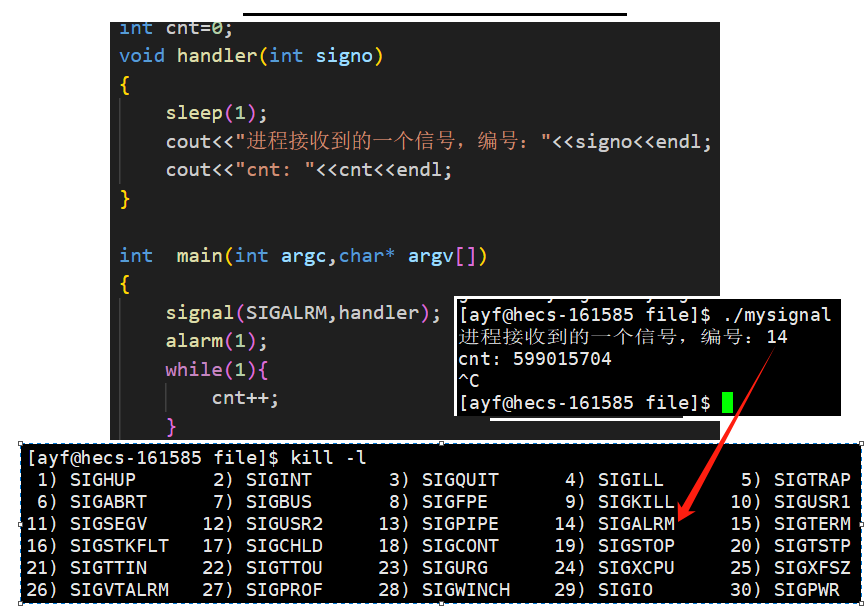
当定时1秒钟时间到了以后,自定义处理方式中打印出接收到的信号编号是14号的SIGALRM信号,并且统计出了1秒钟进行加1操作的次数。
- 自定义处理方式中没有退出进程,所以在执行完处理方式以后,进程继续运行。
- 也就是继续进行加1操作,但是不会再收到信号了,因为定时到的条件只达成一次,所以信号也只产生一次。
如果想每隔一秒条件达成一次,产生一次SIGALRM信号,可以在这样处理:

运行结果:

- 在自定义处理方式中定时1s。
- 当1秒定时条件达成以后,产生信号,执行处理方法后会开始新一轮的定时。
软件中某个条件达成以后,操作系统就会产生相应的信号,比如上面的SIGPIPE信号和SIGALRM信号。
闹钟的管理:
操作系统中会有很多个进程,我们可以创建一个闹钟,那么其他进程也可以创建闹钟,这样就会存在很多个闹钟,那么这些闹钟是怎么管理的呢?先描述再组织。
首先需要创建一个闹钟的结构体,伪代码:
struct alarm
{unit64_t when;//定时时长int type;//闹钟类型,一次性还是周期性task_struct* p;//所属进程的地址struct_alarm* next;//下一个闹钟的地址//其他属性
}
大概就是这样的一个结构体来描述闹钟,必须由的肯定是定时时长,所属进程。
接下来就是组织了,用某一种数据结构来管理这些闹钟对象,为了方便管理,可以选择优先级队列prority_queuq来管理。

- 将定时时间最小的闹钟放在前面,时间长的放在后面。
- 操作系统每次只需要检测队首的定时时间是否达到就可以。
- 达到了就向对应进程发送SIGALRM信号,并且从队列中取出,以待再次检测。
操作系统会周期性的检测链表中的这些闹钟,伪代码:
curr_timestamp > alarm.when;//超时了
//OS发送SIGALRM信号到alarm.p;
具体的实现细节有兴趣的小伙伴可以看看源码是怎么管理的,这里本喵只是介绍一种思想。
三、核心转储
是否有一个疑问,31个信号的默认处理方式都是结束进程,并且还可以自定义处理方式,那么为什么要这么多信号呢?一个信号不就行了吗?
- 重要的不是产生信号的结果,而是产生信号的原因。
- 所有出现异常的进程,必然是收到了某一个信号。
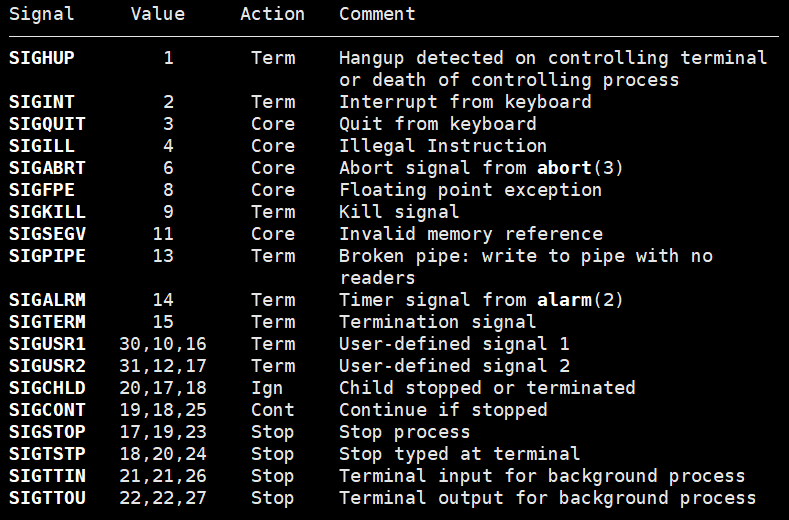
在man的7号手册中介绍了信号的名称,对应的编号,默认处理方式,以及产生该信号的原因。
- 我们可以根据这个表找到不同信号产生所对应的不同原因。
![]()
以信号2和3为例,他两的默认处理方式一个是Term,一个是Core。
- Term和Core的结果都是结束进程。
那么这两个方式的区别在哪里呢?
- Term方式仅仅是结束进程,结束了以后就什么都不干了。
- 但是Core不仅结束进程,而且还会保存一些信息。

在数据越界非常严重的时候,该进程会接收到SIGSEGV信号,来结束进程。
11号信号的默认处理方式是Core。
在云服务器上,默认情况下是看不到Core退出的现象的,这是因为云服务器关闭了core file选项:
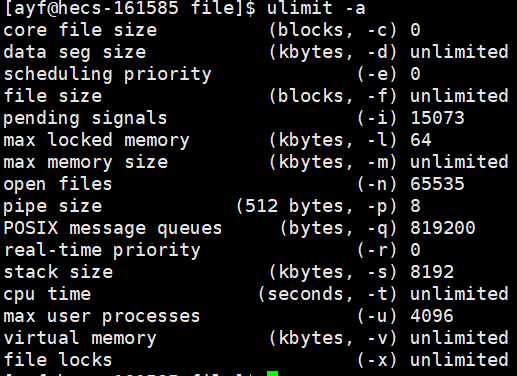
- core file size(红色框)的大小是0,意味着这个选项是关闭的。
- 从这里还可以看到别的关于这个云服务器的信息,比如能够打开的最多文件个数,管道个数,以及栈的大小等等信息。
为了能够看到Core方式的明显现象,我们需要将core file选项打开:

此时该选项就打开了,表示的意思就是核心转储文件的大小是1024个数据块。
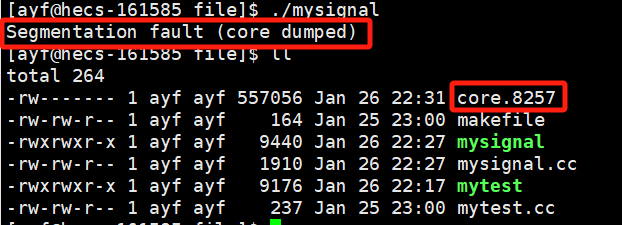
- 再运行数据越界的程序时,同样会收到SIGSEGV信号停止。
- 但是在当前目录下会多出一个文件,如上图中的绿色框。
core.1739:被叫做核心转储文件,其中后缀1739是接收到该信号进程的pid值。
对于一个奔溃的程序,我们最关心的是它为什么崩溃,在哪里崩溃?
- 当进程出现异常的时候,将进程在对应的时刻,在内存中的有效数据转储到磁盘中-------核心转储。
核心转储的文件我们可以拿着它进行调试,快速定位到出现异常而崩溃的位置。
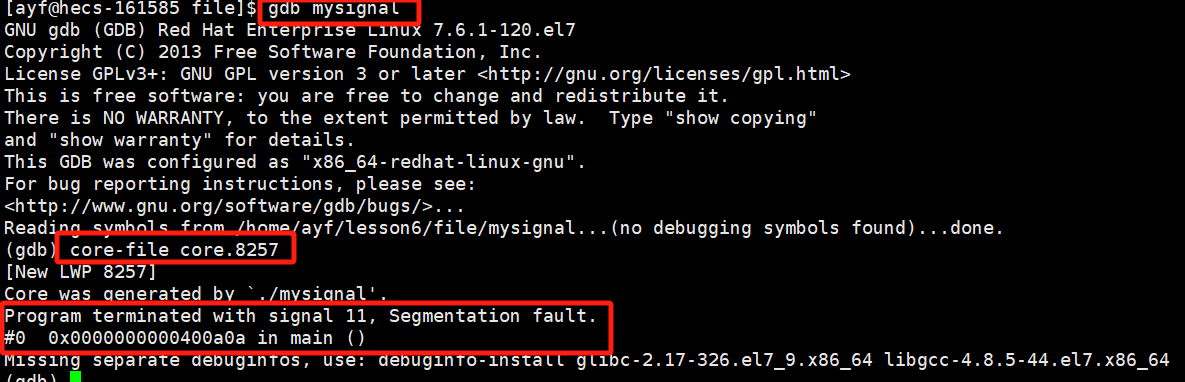
- 使用gdb调试我们的可执行程序。
- 调试开始后,输入core-file core.pid值,表明调试核心转储文件。
- 此时gdb就会直接定位到产生异常的位置。
这就是核心转储的重要意义,它相比Term方式,能够让我们快速定位出现异常的位置。
感谢阅读!!!!!!!!!!
这篇关于(27)Linux信号的产生核心转储---初步认识信号的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








