本文主要是介绍【JZ2440笔记】串口通信,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、前言
二、实验目标
三、串口资源介绍
四、程序编写
五、实验总结
一、前言
串口通信是嵌入式开发中非常常见的调试工具接口,我们大都通过串口的打印输出来确定程序的运行状况,无论是在单片机还是在各种ARM处理器上,基本上都会有串口这个外设,以下是S3C2440的串口调试过程。
二、实验目标
通过JZ2440上的串口0实验与PC机的串口通信,波特率为115200、无奇偶校验位,8个数据位,1个停止位,并且开发板将串口助手发送的数据原样返回给串口助手。
三、串口资源介绍
1、开发板连线
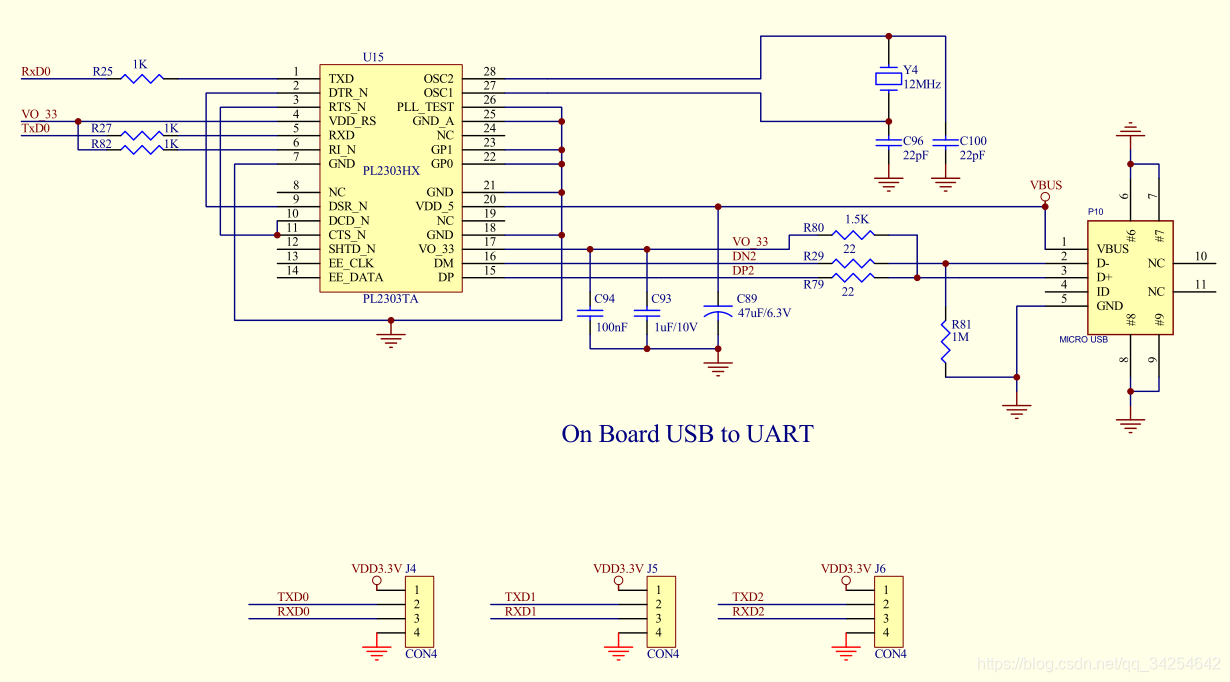
S3C2440有三个串口模块,分别为UART0、UART1和UART2,JZ2440开发板将这三个串口全部引出到排针,其中UART0还通过PL2303芯片转出了一个micro USB接口,原理图如下:
2、S3C2440串口介绍
串口模块方框图如下:

串口模块可以通过PCLK、FCLK/n或UEXTCLK来提供运行时钟,每个串口通道都有64字节的发送缓冲寄存器和64字节的接收缓冲寄存器,这些缓冲寄存器可以通过配置选择使用或者不使用,同时串口模块还支持中断和DMA传输,这些附加功能跟单片机一模一样。另外串口模块还可以配置位红外模式来使用。
3、串口寄存器配置
串口的波特率和分频之间的计算公式如下:
UBRDIVn = (int)( UART 时钟 / ( 波特率 × 16) ) - 1
举个例子:如果波特率为 115200 bps 并且 UART 时钟为 40 MHz,则 UBRDIVn 为:
UBRDIVn = (int)(40000000 / (115200 x 16) ) - 1
= (int)(21.7) - 1 [ 取最接近的整数]
= 22 - 1 = 21
当然,由于取整的原因,以上计算是有一定误差的,手册上建议的误差是UART 帧误差应该小于 1.87%(3/160)。波特率设置的寄存器如下:

我们使用串口0只需要设置ULCON0,波特率为115200、无奇偶校验位,8个数据位,1个停止位,所以ULCON0的配置为0x03。
接下来是UCON寄存器:
![]()

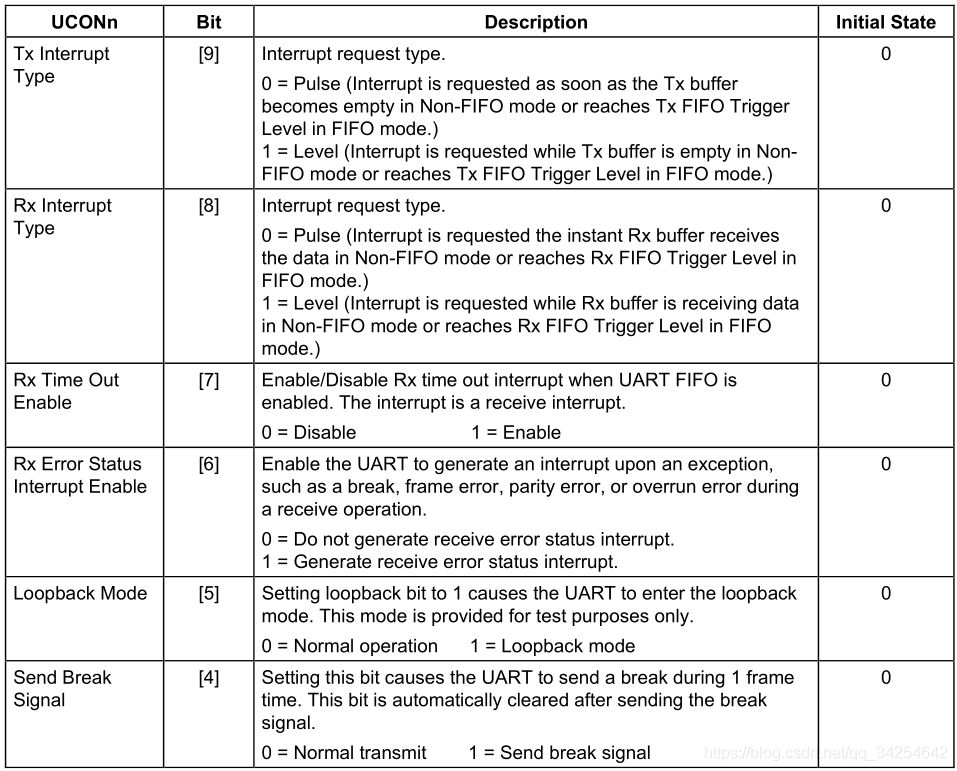
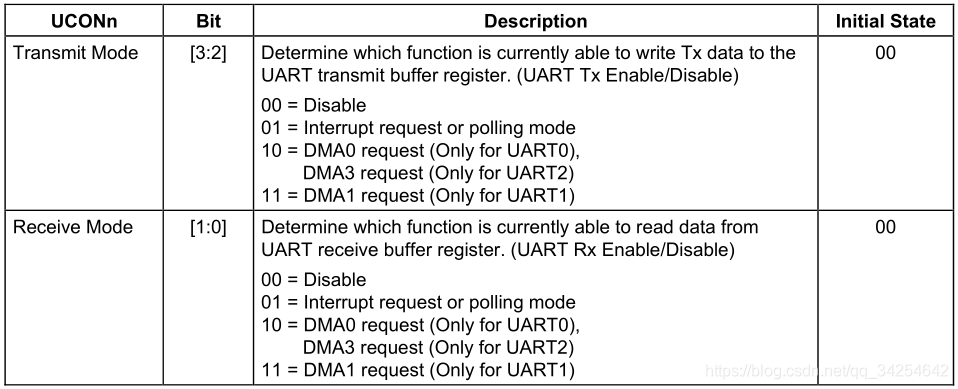
因为使用的是PCLK作为串口工作时钟,所以FCLK Divider不用管,Clock Selection设为0,Tx Interrupt Type设为0不使用发送FIFO,Rx Interrupt Type设为0不使用接收FIFO,Transmit Mode 设置为01,Receive Mode设置为01。这样UCON0寄存器就设置为0x05。
还有波特率分频设置:

UBRDIV0 = (PCLK_SPEED / (115200 * 16)) - 1,PCLK_SPEED为50MHz,所以UBRDIV0为26。
配置好了上述寄存器后,我们还需要有标志位来判断什么时候接收到了数据,什么时候发送完成了数据,有如下的状态寄存器:
![]()

要发送的数据需要写到UTXH0 寄存器中,接收数据可以从URXH0中获得。
四、程序编写
程序分为以下几个文件:
head.S;启动文件。
init.c:关闭看门狗,初始化时钟的函数。
uart.c:串口相关配置。
uart.h:串口头文件。
main.c:主函数。
Makefile:编译程序。
每个文件具体内容如下:
head.S
@*************************************************************************
@ File:head.S
@ 功能:设置FCLK到400MHz,然后初始化串口
@*************************************************************************
.text
.global _start
_start:ldr sp, =4096 @设置堆栈,因为要调用C语言函数 bl disable_watch_dog @关WATCH DOGbl init_system_clk @初始化系统时钟,FCLK=400MHz,HCLK=100MHz,PCLK=50MHzbl main @跳转执行main函数halt_loop:b halt_loopinit.c
/* WOTCH DOG register */
#define REG_WTCON (*(volatile unsigned long *)0x53000000)/* Sys Clk Config */
#define REG_CLKDIVN (*(volatile unsigned long *)0x4C000014)
#define REG_CAMDIVN (*(volatile unsigned long *)0x4C000018)
#define REG_MPLLCON (*(volatile unsigned long *)0x4C000004)void disable_watch_dog();
void init_system_clk();/*上电后,WATCH DOG默认是开着的,要把它关掉 */
void disable_watch_dog()
{REG_WTCON = 0;
}void init_system_clk()
{//HCLK = FCLK/4, 当 CAMDIVN[9] = 0 时//PCLK 设置为 HCLK/2 //完成配置FCLK : HCLK : PCLK = 1 : 1/4 : 1/8,DIVN_UPLL是USB的时钟不用管REG_CLKDIVN = (2 << 1) | (1 << 0);/* 如果HDIVN非0,CPU的总线模式应该从“fast bus mode”变为“asynchronous bus mode” */
__asm__("mrc p15, 0, r1, c1, c0, 0\n" /* 读出控制寄存器 */ "orr r1, r1, #0xc0000000\n" /* 设置为“asynchronous bus mode” */"mcr p15, 0, r1, c1, c0, 0\n" /* 写入控制寄存器 */);//m=MDIV+8, p=PDIV+2, s=SDIV, Mpll = ( 2 × m × Fin ) / ( p × 2^s )//FCLK = (2 * (92 + 8) * 12000000) / ((1 + 2) * 2) = 400000000 = 400MHz//配置完MPLL后时钟停振,CPU停止运行等待时钟输出稳定,之后FCLK=400MHz,HCLK=100MHz,PCLK=50MHz */REG_MPLLCON = (92<<12)|(1<<4)|(1<<0);
}
uart.c
#include "uart.h"void init_uart(DWORD buadrate)
{//Step1,配置GPIO,GPH3(RXD0),GPH2(TXD0)//清除相关配置位REG_GPHCON &= ~((DWORD)(3 << (2*3)) | (3 << (2*2)));REG_GPHDAT &= ~((DWORD)(1 << 3) | (1 << 2));REG_GPHUP &= ~((DWORD)(1 << 3) | (1 << 2));//设置相关配置位REG_GPHCON |= ((DWORD)2 << (2*3)) | (2 << (2*2));REG_GPHDAT |= ((DWORD)1 << 3) | (1 << 2);REG_GPHUP |= ((DWORD)1 << 3) | (1 << 2);//无校验,1个停止位,8个数据位REG_ULCON0 = 0x03;//发送和接受设置为查询/中断模式REG_UCON0 = 0x05;//不使用FIFOREG_UFCON0 = 0;//不使用流控REG_UMCON0 = 0;//UBRDIVn = (int)( UART clock / ( buad rate x 16) ) –1REG_UBRDIV0 = (PCLK_SPEED / (115200 * 16)) - 1;
}void uart_send(BYTE ch)
{while(!(REG_UTRSTAT0 & (1 << 2))){;}REG_UTXH0 = ch;
}BYTE uart_receive()
{while(!(REG_UTRSTAT0 & (1 << 0))){;}return REG_URXH0;
}
uart.h
#ifndef _UART_H_
#define _UART_H_#define BYTE unsigned char
#define WORD unsigned short
#define DWORD unsigned int/* Uart Config */
#define PCLK_SPEED 50000000#define REG_GPHCON (*(volatile unsigned long *)0x56000070)
#define REG_GPHDAT (*(volatile unsigned long *)0x56000074)
#define REG_GPHUP (*(volatile unsigned long *)0x56000078)#define REG_ULCON0 (*(volatile unsigned long *)0x50000000)
#define REG_UCON0 (*(volatile unsigned long *)0x50000004)
#define REG_UFCON0 (*(volatile unsigned long *)0x50000008)
#define REG_UMCON0 (*(volatile unsigned long *)0x5000000C)#define REG_UTXH0 (*(volatile unsigned long *)0x50000020)
#define REG_URXH0 (*(volatile unsigned long *)0x50000024)#define REG_UBRDIV0 (*(volatile unsigned long *)0x50000028)#define REG_UTRSTAT0 (*(volatile unsigned long *)0x50000010)void init_uart(DWORD buadrate);
void uart_send(BYTE ch);
BYTE uart_receive();#endif
main.c
#include "uart.h"void wait(volatile unsigned long dly)
{for(; dly > 0; dly--);
}int main()
{init_uart(115200);while(1){ uart_send(uart_receive());}return 0;
}Makefile
objs := head.o init.o uart.o main.ouart.bin: $(objs)arm-linux-ld -Ttext 0x0000000 -g -o uart_elf $^arm-linux-objcopy -O binary -S uart_elf $@arm-linux-objdump -D -m arm uart_elf > uart.dis%.o:%.carm-linux-gcc -Wall -O2 -c -o $@ $<%.o:%.Sarm-linux-gcc -Wall -O2 -c -o $@ $<clean:rm -f uart.bin uart_elf uart.dis *.o
最后,将所有源文件拷贝到linux下,执行make命令后,将生成的bin文件烧写到开发板NandFlash中,选择开发板nand启动后,连接串口线到串口0,使用串口助手可以看见实验现象,串口助手发送的所有数据被原样返回。
五、实验总结
串口的配置方式和寄存器基本都和单片机的一样,也就那些基本的操作。
这篇关于【JZ2440笔记】串口通信的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








