本文主要是介绍《ORANGE’S:一个操作系统的实现》读书笔记(三十)文件系统(五),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
上一篇文章记录了如何进行文件的创建,那么本篇文章要记录的事情就是如何在创建的文件中进行读写操作,毕竟文件是要操作才有意义的。
读写文件
由于我们使用“一次分配,终身使用”的扇区分配策略,所以文件读写变得非常容易,我们先来添加处理READ和WRITE消息的代码:
代码 fs/main.c,文件系统处理READ和WRITE消息。
/*** <Ring 1> The main loop of TASK FS.*/
PUBLIC void task_fs()
{
...switch (fs_msg.type) {case OPEN:fs_msg.FD = do_open();break;case CLOSE:fs_msg.RETVAL = do_close();break;case READ:case WRITE:fs_msg.CNT = do_rdwt();break;default:dump_msg("FS::unknown message:", &fs_msg);assert(0);break;
...
}读写两种消息由同一个函数do_rdwt()来处理,代码如下所示。
代码 fs/read_write.c,do_rdwt,这是新建的文件。
/*** Read/Write file and return byte count read/written.* * Sector map is not needed to update, since the sectors for the file have been* allocated and the bits are set when the file was created.* * @return How many bytes have been read/written.*/
PUBLIC int do_rdwt()
{int fd = fs_msg.FD; /*< file descriptor. */void * buf = fs_msg.BUF; /*< r/w buffer */int len = fs_msg.CNT; /*< r/w bytes */int src = fs_msg.source; /* caller proc nr. */assert((pcaller->filp[fd] >= &f_desc_table[0]) &&(pcaller->filp[fd] < &f_desc_table[NR_FILE_DESC]));if (!(pcaller->filp[fd]->fd_mode & O_RDWR)) {return -1;}int pos = pcaller->filp[fd]->fd_pos;struct inode * pin = pcaller->filp[fd]->fd_inode;assert(pin >= &inode_table[0] && pin < &inode_table[NR_INODE]);int imode = pin->i_mode & I_TYPE_MASK;if (imode == I_CHAR_SPECIAL) {int t = fs_msg.type == READ ? DEV_READ : DEV_WRITE;fs_msg.type = t;int dev = pin->i_start_sect;assert(MAJOR(dev) == 4);fs_msg.DEVICE = MINOR(dev);fs_msg.BUF = buf;fs_msg.CNT = len;fs_msg.PROC_NR = src;assert(dd_map[MAJOR(dev)].driver_nr != INVALID_DRIVER);send_recv(BOTH, dd_map[MAJOR(dev)].driver_nr, &fs_msg);assert(fs_msg.CNT == len);return fs_msg.CNT;} else {assert(pin->i_mode == I_REGULAR || pin->i_mode == I_DIRECTORY);assert((fs_msg.type == READ) || (fs_msg.type == WRITE));int pos_end;if (fs_msg.type == READ) {pos_end = min(pos + len, pin->i_size);} else {pos_end = min(pos + len, pin->i_nr_sects * SECTOR_SIZE);}int off = pos % SECTOR_SIZE;int rw_sect_min = pin->i_start_sect + (pos >> SECTOR_SIZE_SHIFT);int rw_sect_max = pin->i_start_sect + (pos_end >> SECTOR_SIZE_SHIFT);int chunk = min(rw_sect_max - rw_sect_min + 1, FSBUF_SIZE >> SECTOR_SIZE_SHIFT);int bytes_rw = 0;int bytes_left = len;int i;for (i = rw_sect_min; i <= rw_sect_max; i += chunk) {/* read/write this amount of bytes every time */int bytes = min(bytes_left, chunk * SECTOR_SIZE - off);rw_sector(DEV_READ, pin->i_dev, i * SECTOR_SIZE, chunk * SECTOR_SIZE, TASK_FS, fsbuf);if (fs_msg.type == READ) {phys_copy((void*)va2la(src, buf + bytes_rw),(void*)va2la(TASK_FS, fsbuf + off),bytes);} else { /* WRITE */phys_copy((void*)va2la(TASK_FS, fsbuf + off),(void*)va2la(src, buf + bytes_rw),bytes);rw_sector(DEV_WRITE, pin->i_dev, i * SECTOR_SIZE, chunk * SECTOR_SIZE, TASK_FS, fsbuf);}off = 0;bytes_rw += bytes;pcaller->filp[fd]->fd_pos += bytes;bytes_left -= bytes;}if (pcaller->filp[fd]->fd_pos > pin->i_size) {/* update inode::size */pin->i_size = pcaller->filp[fd]->fd_pos;/* write the updated i-node back to disk*/sync_inode(pin);}return bytes_rw;}
}在读写的过程中,我们仍然照顾到了字符设备特殊文件。跟前面一样,我们仍然是把它扔给相应的驱动程序——虽然驱动程序并未准备好处理,但发送一个消息只是举手之劳,我们不妨先把它添上。
读写普通文件时,file_desc结构体的成员悉数到场。首先是对fd_mode进行简单的判断,这其实是判断open()函数调用时是否传入了正确的flag参数,因为fd_mode是从那里得来的。我们对flags的可选值进行了简化,它的可选值只有两个:O_CREAT和O_RDWR,要想读写文件,调用open()时需要加上O_RDWR。
fd_pos的用途在于记录读写到文件的哪个位置,类似于一个书签,在文件刚打开时它被置为0。
fd_inode所指向的便是被操作文件的i-node了,我们通过它获得文件的开始扇区、文件类型,以及文件大小等信息。
真正的读写过程从第52行开始。变量pos表示开始读写的位置,pos_end表示结束读写的位置,读操作时pos_end不能越过文件已有的大小,写操作时pos_end不能越过为文件所分配的最大空间。通过pos和pos_end,我们可以计算出读/写操作所涉及的扇区边界,这里用rw_sect_min和rw_sect_max表示。计算时用右移操作代替除法运算,右移SECTOR_SIZE_SHIFT位相当于被SECTOR_SIZE除。
对扇区的读写以chunk为单位,最大不能超过为fsbuf分配的空间。
需要注意,不仅读操作,写操作也需要先将目标扇区读出,因为读写都是以扇区为单位的,而写操作可以在文件的任意位置进行,所以以扇区为单位的上下文需要先行读出。写操作的另一特殊之处在于它可能改变文件大小,所以返回之前要检查这一点,如果文件大小被改变,则需要更新i-node。
现在FS能处理READ和WRITE消息了,我们马上写两个函数:read()和write(),以便用户进程使用,具体如下代码所示。
代码 lib/read.c,read(),这是新建的文件。
/*** Read from a file descriptor.* * @param fd File descriptor.* @param buf Buffer to accept the bytes read.* @param count How many bytes to read.* * @return On success, the number of bytes read are returned.* On error, -1 is returned.*/
PUBLIC int read(int fd, void *buf, int count)
{MESSAGE msg;msg.type = READ;msg.FD = fd;msg.BUF = buf;msg.CNT = count;send_recv(BOTH, TASK_FS, &msg);return msg.CNT;
}代码 lib/write.c,write(),这是新建的文件。
/*** Write to a file descriptor.* * @param fd File descriptor.* @param buf Buffer including the bytes to write.* @param count How many bytes to write.* * @return On success, the number of bytes written are returned.* On error, -1 is returned.*/
PUBLIC int write(int fd, const void *buf, int count)
{MESSAGE msg;msg.type = WRITE;msg.FD = fd;msg.BUF = (void*)buf;msg.CNT = count;send_recv(BOTH, TASK_FS, &msg);return msg.CNT;
}测试文件读写
好了,现在可以读写文件了,我们马上来测试一下,修改TestA,代码如下所示。
代码 kernel/main.c,读写文件。
void TestA()
{int fd;int n;const char filename[] = "blah";const char bufw[] = "abcde";const int rd_bytes = 3;char bufr[rd_bytes];assert(rd_bytes <= strlen(bufw));/* create */fd = open(filename, O_CREAT | O_RDWR);assert(fd != -1);printf("File created. fd: %d\n", fd);/* write */n = write(fd, bufw, strlen(bufw));assert(n == strlen(bufw));/* close */close(fd);/* open */fd = open(filename, O_RDWR);assert(fd != -1);printf("File opened. fd: %d\n", fd);/* read */n = read(fd, bufr, rd_bytes);assert(n == rd_bytes);bufr[n] = 0;printf("%d bytes read: %s\n", n, bufr);/* close */close(fd);spin("TestA");
}好了,现在可以make并运行查看结果了,由于我们新添加了几个C文件,不要忘记更改Makefile。运行结果如下图所示。

从运行结果看,文件读操作成功了,“abc”三个字符被读出,为保险起见,我们还是深入磁盘映像,看一下如今的“/blah”文件变成什么样了:



理所应当地,inode-map、sector-map以及根目录区没有任何改变,只是“/blah”的i-node变了,i_size变成了5,这是正确的,因为我们写入了5个字节。
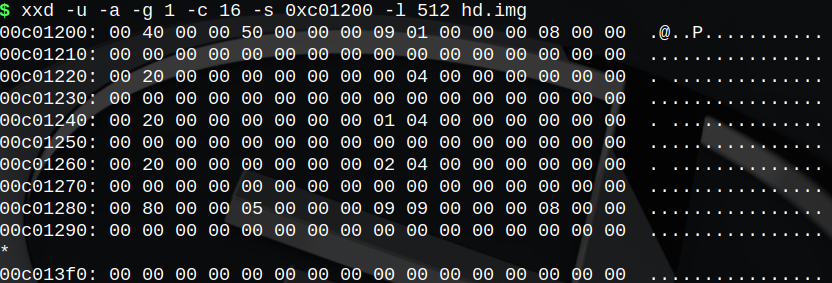
接下来还要看一看“/blah”实际占用的扇区中数据的情况。从i-node中可知,文件的开始扇区号是909h,将它与分区的开始扇区号6000h相加,得到“/blah”占用的首扇区的LBA:6909h,将它乘以200h,得到D21200h,这便是“/blah”数据扇区的字节偏移了,让我们来看看里面的内容:

看到了“abcde”,写入操作成功了。
虽然目前的测试还远远不够充分,但是我们有理由庆贺一番了,因为有了创建和读写功能,我们的文件系统就算是具备雏形了。
欢迎关注我的公众号

这篇关于《ORANGE’S:一个操作系统的实现》读书笔记(三十)文件系统(五)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







