本文主要是介绍RT-Thread:SPI万能驱动 SFUD 驱动Flash W25Q64,通过 STM32CubeMX 配置 STM32 SPI 驱动,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
关键词:SFUD,FLASH,W25Q64,W25Q128,STM32F407
说明:RT-Thread 系统 使用 SPI万能驱动 SFUD 驱动 Flash W25Q64,通过 STM32CubeMX 配置 STM32 SPI 驱动。
提示:SFUD添加后的存储位置

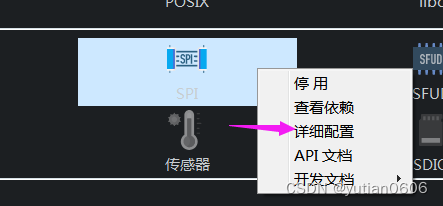
1.打开RT-Thread Setting SPI SFUD

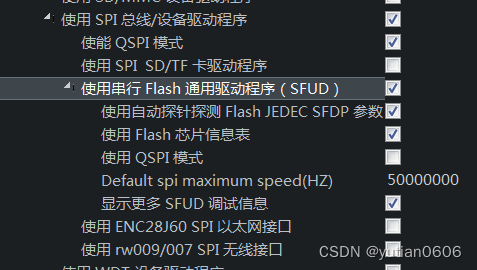
打开 SFUD ,SPI

右键-详细配置
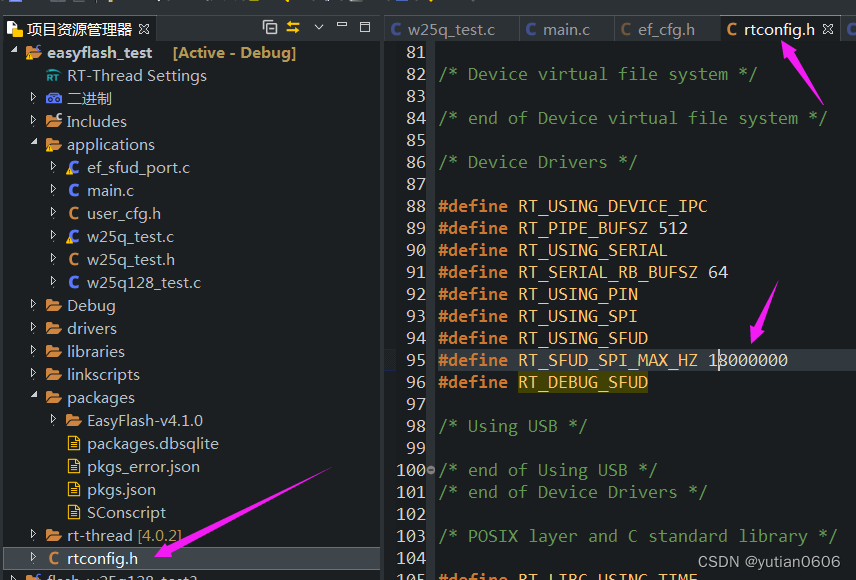
SFUD的配置 放置于如下头文件 rtconfig.h
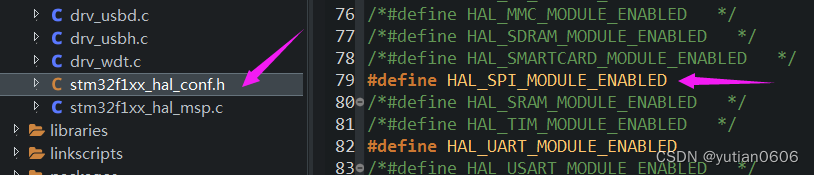
2.开启board.h/stm32F1xx_hal_config.h中关于SPI的宏定义
STEP 1:第一步打开RT-Thread Setting SPI SFUD 中已经操作实现。
STEP 2:定义与spi总线相关的宏,例如#define BSP_USING_SPI1

STEP 4:修改您的stm32xxxx_hal_config.h文件以支持spi外围设备。 定义与外围设备相关的宏,例如#define HAL_SPI_MODULE_ENABLED
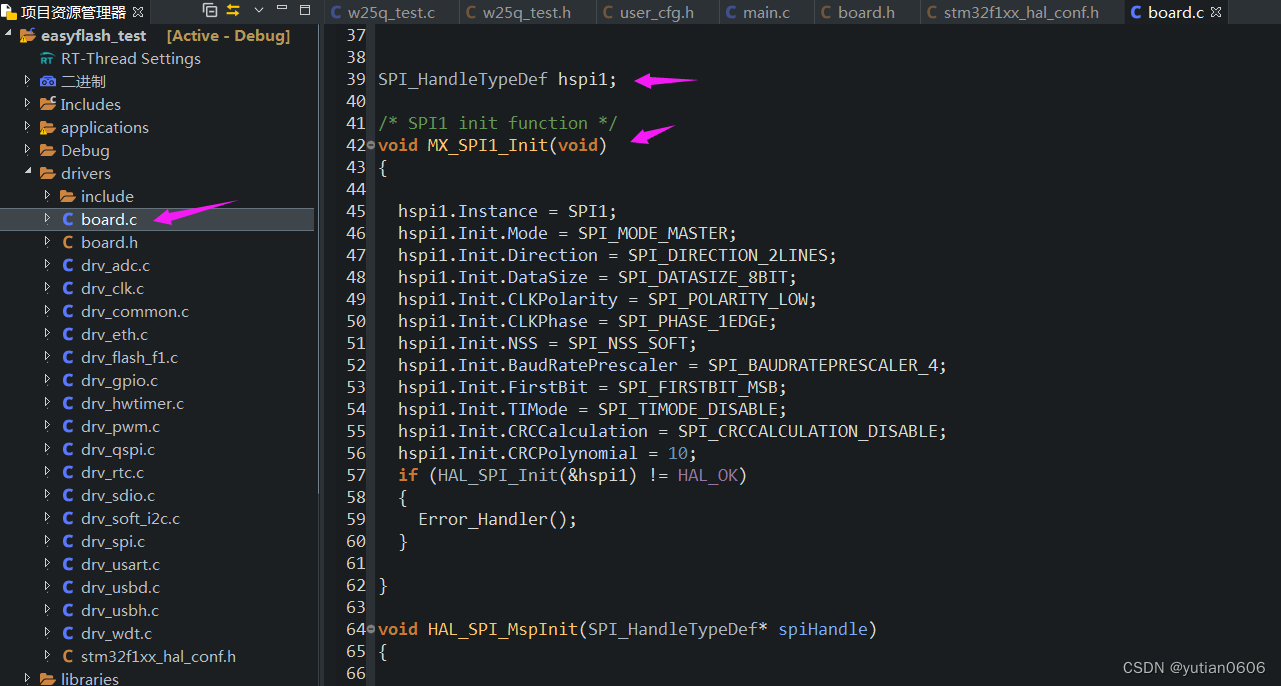
STEP 3:将由stm32cubemx生成的stm32xxxx_hal_msp.c的spi init函数复制到board.c文件的末尾,例如void HAL_SPI_MspInit(SPI_HandleTypeDef * hspi)
如下复制过程,将由stm32cubemx生成的 SPI 驱动部分代码全部复制到 board.c文件的末尾
3.stm32cubemx SPI 驱动生成过程
如何打开 stm32cubemx 建工程的过程就不讲解,直接讲关于SPI的配置过程
根据对应的STM32芯片打开一个工程配置SPI部分
时钟配置

时钟树配置

SPI接口设置

输出项目设置

代码生成器 设置

生成代码

打开文件夹
SPI.C文件夹内便是生成的关于SPI接口的配置驱动代码
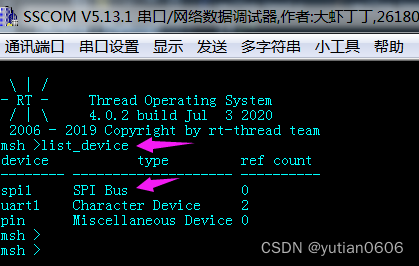
4.编译烧录后 发送命令 list_device 可以看到SPI总线 SPI1 已经注册到系统
5.SPI从设备驱动编写
SPI的总线设备已经注册完毕,接下来需要进行SPI从设备驱动编写,这里直接使用开发板板载的SPI Flash W25Q64进行测试,
新建 w25q_test.c
#include <rtthread.h>
#include <board.h>
#include <rtdevice.h>
#include "drv_spi.h"
#include "spi_flash_sfud.h"static int rt_hw_spi_flash_init(void)
{__HAL_RCC_GPIOB_CLK_ENABLE();rt_hw_spi_device_attach("spi1", "spi10", GPIOC, GPIO_PIN_0);// spi10 表示挂载在 spi3 总线上的 0 号设备,PC0是片选,这一步就可以将从设备挂在到总线中。if (RT_NULL == rt_sfud_flash_probe("W25Q64", "spi10")) //注册块设备,这一步可以将外部flash抽象为系统的块设备{return -RT_ERROR;};return RT_EOK;
}
/* 导出到自动初始化 */
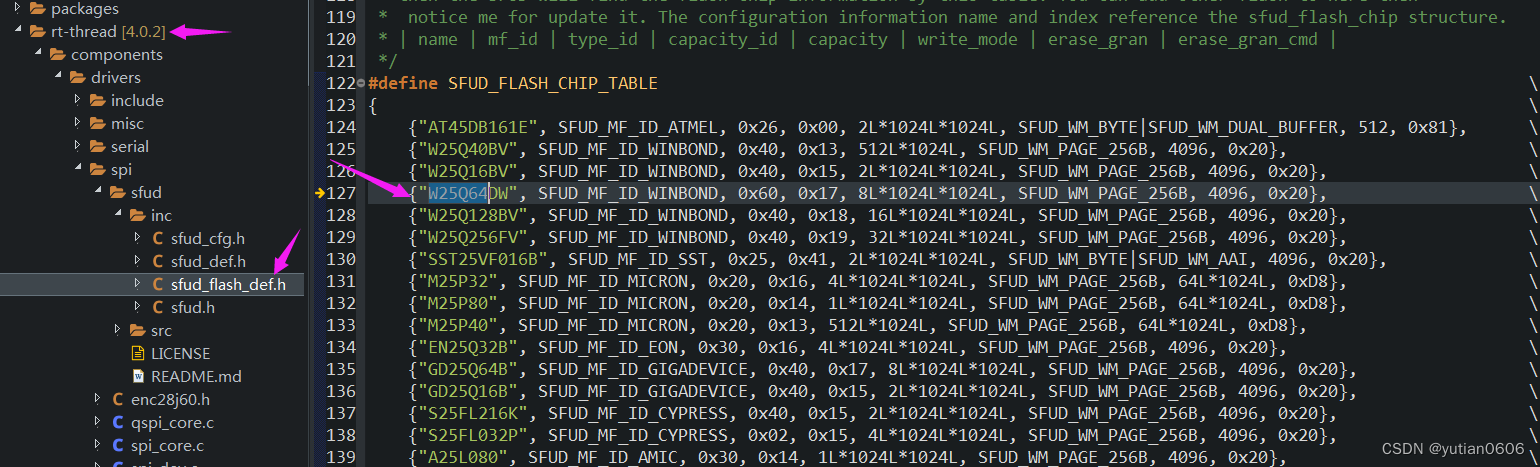
INIT_COMPONENT_EXPORT(rt_hw_spi_flash_init);不支持 SFDP 标准的 Flash 已经在 Flash 参数信息表中定义,sfud_flash_def.h 文件有关于 flash 芯片的配置信息,配置中有的型号可以直接定义使用;配置中没有,且不支持SFDP的Flash 可以自己添加。
注意:上述代码中的 "W25Q64" 与下截图的型号无关,进过测试,将"W25Q64" 改为"W25Q664" 编译烧录后,串口打印的数据任然一样,打印信息是 SFUD 自动探测读出的 Flash 的信息。具体原理不清楚。
编译后烧录,串口会显示 FLASH 的注册信息
SFUD打印了 基本Flash参数表信息
\ | /
- RT - Thread Operating System/ | \ 4.0.2 build Jul 3 20202006 - 2019 Copyright by rt-thread team
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud.c:862) The flash device manufacturer ID is 0xEF, memory type ID is 0x40, capacity ID is 0x17.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:132) Check SFDP header is OK. The reversion is V1.5, NPN is 0.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:175) Check JEDEC basic flash parameter header is OK. The table id is 0, reversion is V1.5, length is 16, parameter table pointer is 0x000080.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:203) JEDEC basic flash parameter table info:
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:204) MSB-LSB 3 2 1 0
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0001] 0xFF 0xF9 0x20 0xE5
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0002] 0x03 0xFF 0xFF 0xFF
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0003] 0x6B 0x08 0xEB 0x44
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0004] 0xBB 0x42 0x3B 0x08
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0005] 0xFF 0xFF 0xFF 0xFE
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0006] 0x00 0x00 0xFF 0xFF
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0007] 0xEB 0x40 0xFF 0xFF
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0008] 0x52 0x0F 0x20 0x0C
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0009] 0x00 0x00 0xD8 0x10
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:215) 4 KB Erase is supported throughout the device. Command is 0x20.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:234) Write granularity is 64 bytes or larger.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:245) Target flash status register is non-volatile.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:271) 3-Byte only addressing.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:305) Capacity is 8388608 Bytes.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:312) Flash device supports 4KB block erase. Command is 0x20.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:312) Flash device supports 32KB block erase. Command is 0x52.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:312) Flash device supports 64KB block erase. Command is 0xD8.
[SFUD] Find a Winbond flash chip. Size is 8388608 bytes.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud.c:840) Flash device reset success.
[SFUD] W25Q64 flash device is initialize success.
[SFUD] Probe SPI flash W25Q64 by SPI device spi10 success.
msh >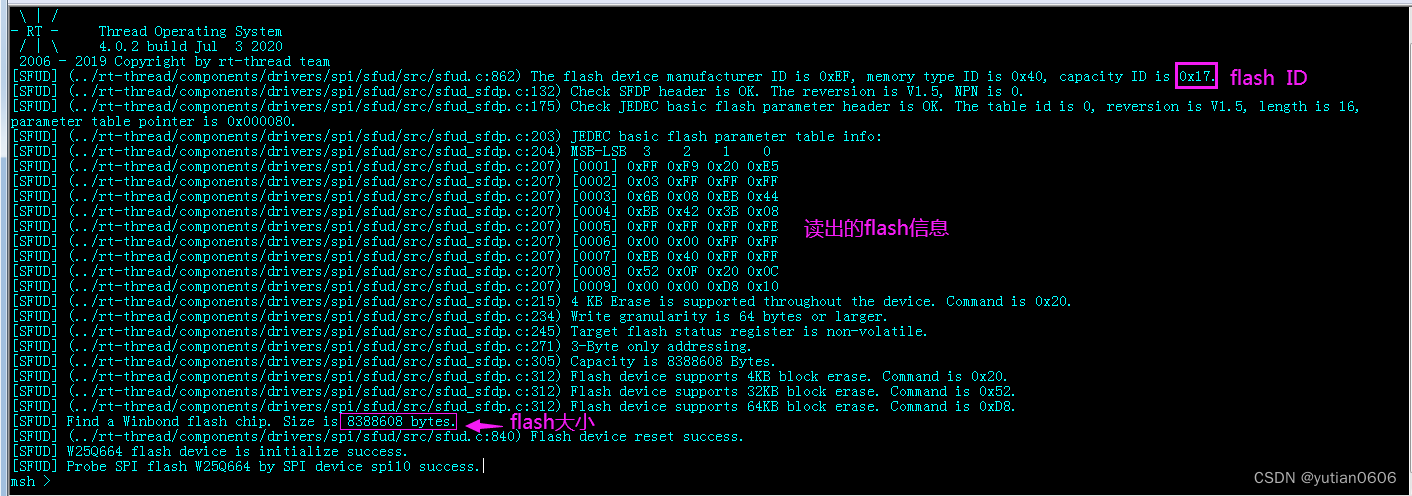
6.SFUD命令介绍
通过串口发送 sf 命令,可以查到关于 SFUD 系统的命令,可以通过命令对Flash进行读写、擦除等操作。
msh >sf
Usage:
sf probe [spi_device] - probe and init SPI flash by given 'spi_device'
sf read addr size - read 'size' bytes starting at 'addr'
sf write addr data1 ... dataN - write some bytes 'data' to flash starting at 'addr'
sf erase addr size - erase 'size' bytes starting at 'addr'
sf status [<volatile> <status>] - read or write '1:volatile|0:non-volatile' 'status'
sf bench - full chip benchmark. DANGER: It will erase full chip!sf probe [spi_device] - 探测命令:使用如 sf probe spi10 ,就能探测到挂载的spi10设备
sf read addr size - 读flash:使用如 sf read 00 100 ,表示从地址00开始读100个字节
sf write addr data1 ... dataN - 写flash:使用如 sf write 17 01 02 03 04 05 06 07 08 09 10 11 ,表示从17地址开始写入后面这些数据
sf erase addr size - 擦除命令:
sf status [<volatile> <status>] - 查询状态:查询状态寄存器的值- 全芯片基准测试。 危险:它将擦除整个芯片!7.SFUD 测试程序
#include "user_cfg.h"/*
W25Q128介绍
W25Q128是华邦公司推出的大容量SPI FLASH产品,W25Q128的容量为128M bit,该系列还有W25Q80/16/32/64等。
W25Q128将16M的容量分为256个块(Block),每个块大小为64K字节,每个块又分为16个扇区(Sector),每个扇区4K个字节。
W25Q128的最小擦除单位为一个扇区,也就是每次必须擦除4K个字节。这样我们需要给W25Q128开辟一个至少4K的缓存区,这样对SRAM要求比较高,要求芯片必须有4K以上SRAM才能很好的操作。
W25Q128的擦写周期多达10W次,具有20年的数据保存期限,支持电压为2.7~3.6V,
W25Q128支持标准的SPI,还支持双输出/四输出的SPI,最大SPI时钟可以到80Mhz(双输出时相当于160Mhz,四输出时相当于320M),更多的W25Q128的介绍,请参考W25Q128的DATASHEET。*//* SPI Flash 驱动 */
static int rt_hw_spi_flash_init(void)
{//__HAL_RCC_GPIOB_CLK_ENABLE();/* 往总线 spi1 上挂载一个 spi10 从设备 */rt_hw_spi_device_attach("spi1", "spi10", GPIOA, GPIO_PIN_4);/*spi10 表示挂载在 spi3 总线上的 0 号设备,PC0是片选,这一步就可以将从设备挂在到总线中。*//* 使用 SFUD 探测 spi10 从设备,并将 spi10 连接的 flash 初始化为块设备,名称 W25Q64DW */if (RT_NULL == rt_sfud_flash_probe("W25Q128JV", "spi10")) /* 注册块设备,这一步可以将外部flash抽象为系统的块设备*/{return -RT_ERROR;};return RT_EOK;
}
/* 导出到自动初始化 */
INIT_COMPONENT_EXPORT(rt_hw_spi_flash_init);void W25Q_Flash_test(void)
{sfud_err result;uint8_t *read_data; // 读取到的数据uint8_t *write_data; // 将要写入的数据sfud_flash *sfud_dev = NULL;sfud_dev = rt_sfud_flash_find("spi10"); // 获取 sfud_dev// 或者 sfud_dev = rt_sfud_flash_find_by_dev_name("W25Q128");/*擦除 Flash 数据;flash: Flash 设备对象;addr:起始地址;size:从起始地址开始擦除数据的总大小*/sfud_erase(sfud_dev, 0, 1024); // 擦除从 0 开始的 4096 字节write_data = rt_malloc(4096); // 内存申请,函数会从系统堆空间中找到合适大小的内存块,然后把内存块可用地址返回给用户。rt_memset(write_data, 1, 4096); // 作用是在一段内存块中填充某个给定的值,将 write_data 32 个地址填入1/*往 Flash 写数据:flash:Flash 设备对象;addr:起始地址;size:从起始地址开始写入数据的总大小;data:待写入的数据*/sfud_write(sfud_dev, 0, 4096, write_data); // 将数据 32 字节的 write_data 从 0 开始写入 flashread_data = rt_malloc(4096);rt_memset(read_data, 0, 4096);for (uint16_t var = 0; var < 4096; ++var){rt_kprintf("var = %d ,data = %d \n",var,read_data[var]) ;}/*读取 Flash 数据; flash: Flash 设备对象 ;addr: 起始地址;size:从起始地址开始读取数据的总大小;data:读取到的数据*/sfud_read(sfud_dev, 0, 4096, read_data); // 读取从 0 开始的 32 字节,存入 read_datafor (uint16_t var = 0; var < 4096; ++var){rt_kprintf("var = %d ,data = %d \n",var,read_data[var]) ;}
}这篇关于RT-Thread:SPI万能驱动 SFUD 驱动Flash W25Q64,通过 STM32CubeMX 配置 STM32 SPI 驱动的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







