本文主要是介绍普冉(PUYA)单片机开发笔记(2): Keil uVision工程的文件组织,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
上一篇记录了使用 PUYA 软件包的例程,尝试了对 PY32F003F18P 的 UART 收发。然后就尝试新开一个 uVision Project,发现总是出现各种各样的 xxxx.h -- No such file... 的错误。这是由于厂家自带的例程调用了N多存放在软件包的上级目录中的各种 Driver,BSP,CMSIS 的库文件。
重建厂家例程的最佳实践是基于厂家例程进行修改。从 uVision Project 工程中打开对应的文件,使用 “Open Containing Folder” 获取其所在文件夹(子目录),然后将这些子目录都拷贝到例程所在目录下。这样做以后,可以将例程所在子目录直接打包压缩,方便移植。要不的话,还要把整个厂家软件包都压缩进去,好不麻烦。
今天就把我搬运的过程和结果分享给大家,供指教。
Keil uVision Project的文件组织
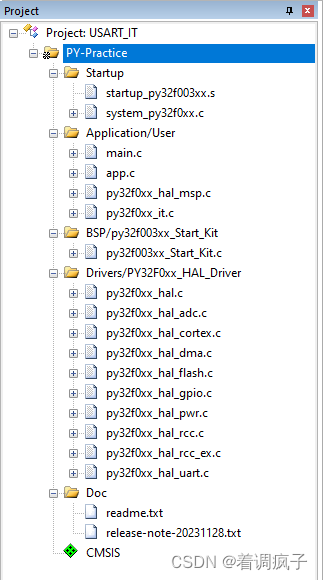
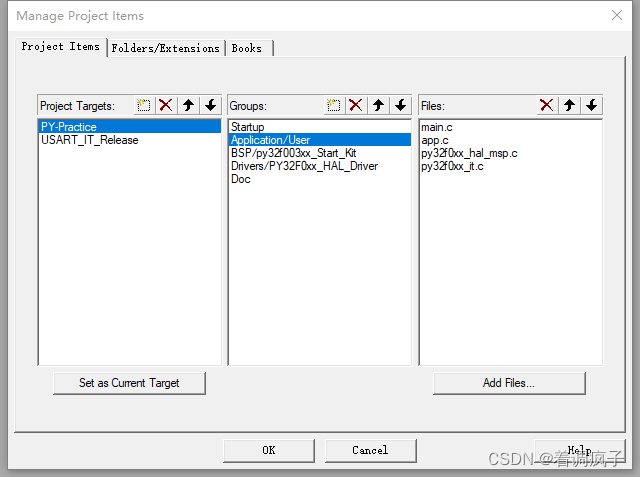
UART_IT 例程的 uVision 工程的文件组织如下图所示。如同其它的工程类似,包含 Startup、Application、BSP(可选)、Drivers、Doc 和 CMSIS 共6个组。
- Startup 包括 startup_xxx.s 和 system_xxx.c,startup_xxx.s 是 MCU 的启动汇编代码,system_xxx.c 包含了 MCU 时钟系统和其它一些初始化代码。
- Application 包括了 main.c,xxx_hal_msp.c 和 xxx_it.c,图中的 app.c 是用户代码。Application 是应用代码和应用逻辑处理的程序集。
- BSP(Start_Kit)包含了开发板的一些特定的定义。如果不需要,可以不建立这个组,也不用导入其中的文件。
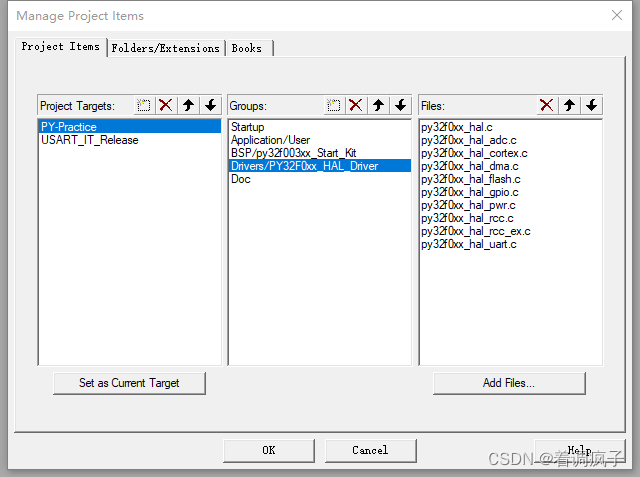
- Drivers 是最重要的库函数。这里导入了厂家的 HAL_Drivers。可以根据需要导入对应的 HAL_Driver。把厂家的 HAL_Drivers 全部导入也是一种一劳永逸的方法,只不过要“看得惯”那些总也用不到的文件列表。;)
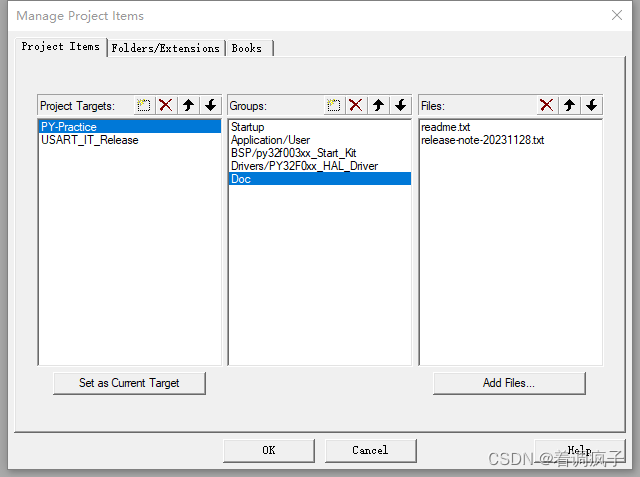
- Doc 组包含了 readme,help 和 release notes 等文档。
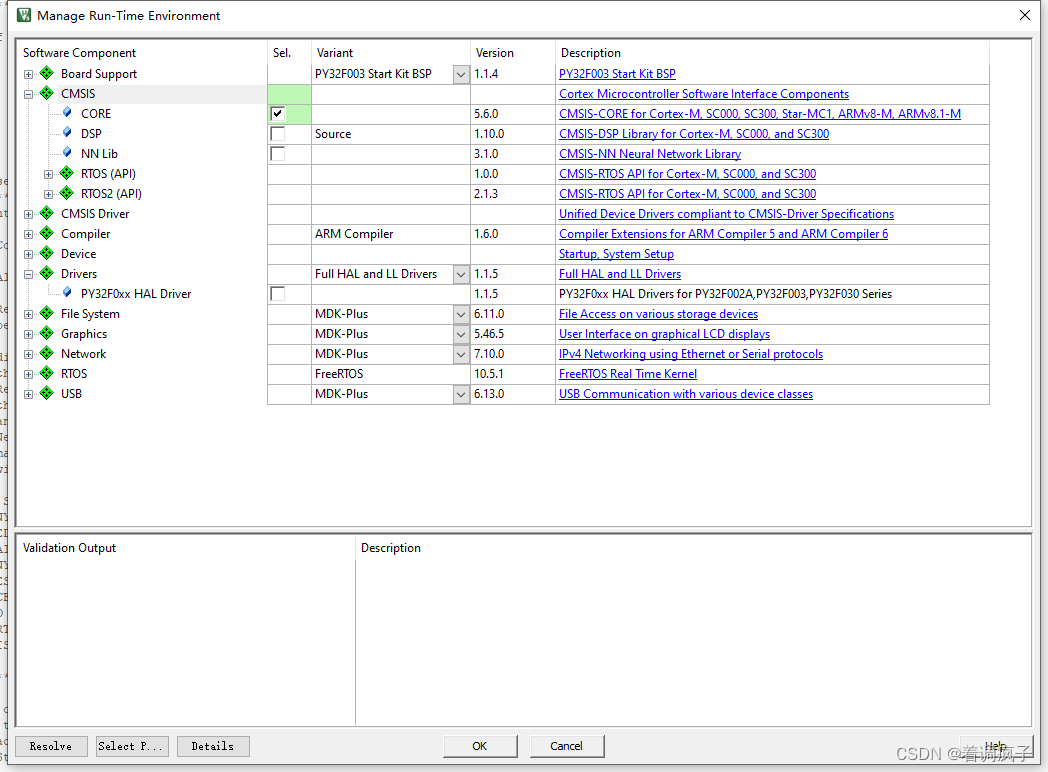
- CMSIS 是芯片选择时由 uVision 自动创建的。导入 PUYA 的 DFP 以后,在创建工程时,只需要选择 CMSIS 的 Core,其它的都不需要选择。尤其是 Drivers --> PY32F0xx HAL Driver 不需要选中,因为在上面的 Drivers 一节已经把 HAL_Driver 拷贝到例程目录下了。
例程的文件在硬盘上的目录树
如下所示。.vscode 是用过了 vscode 以后留下的,不必理会。 MDK-ARM,EWARM 由 uVision 创建,其它文件夹都是手动拷贝的。
.
├─.vscode
├─Drivers
│ ├─BSP
│ │ ├─PY32F002xx_Start_Kit
│ │ ├─PY32F003xx_Start_Kit
│ │ └─PY32F030xx_Start_Kit
│ ├─CMSIS
│ │ ├─Device
│ │ │ └─PY32F0xx
│ │ │ ├─Include
│ │ │ └─Source
│ │ │ ├─arm
│ │ │ └─iar
│ │ ├─DSP_Lib
│ │ │ └─Source
│ │ │ ├─BasicMathFunctions
│ │ │ ├─CommonTables
│ │ │ ├─ComplexMathFunctions
│ │ │ ├─ControllerFunctions
│ │ │ ├─FastMathFunctions
│ │ │ ├─FilteringFunctions
│ │ │ ├─MatrixFunctions
│ │ │ ├─StatisticsFunctions
│ │ │ ├─SupportFunctions
│ │ │ └─TransformFunctions
│ │ ├─Include
│ │ └─RTOS
│ │ └─Template
│ └─PY32F0xx_HAL_Driver
│ ├─Inc
│ └─Src
├─EWARM
├─Inc
├─MDK-ARM
│ ├─DebugConfig
│ ├─Output
│ │ ├─Debug
│ │ └─Release
│ └─RTE
│ ├─_PY-Practice
│ ├─_USART_IT_Debug
│ └─_USART_IT_Release
└─Src
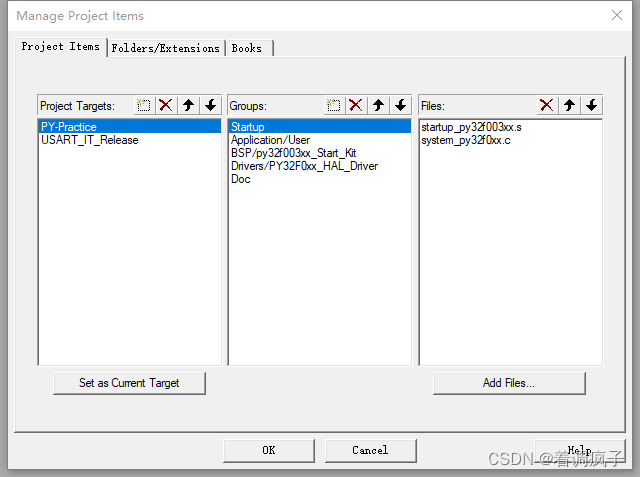
uVision 工程的组织图
不说废话,见下列截图。

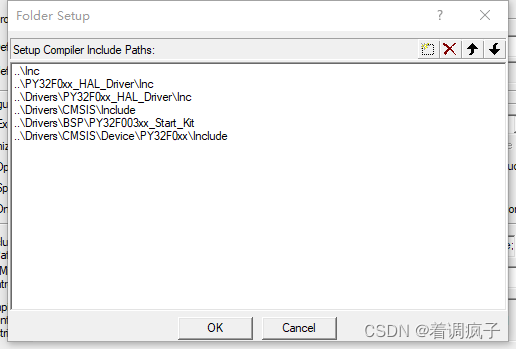
魔术棒修改 C/C++ 的 include 目录
PY32F003x8 的 GPIO 操作
首先在 main.c 中增加 GPIO_Config(void) 函数如下。这些语句是不是很熟悉?是滴,PY32 的 GPIO_Config 和 STM32 系列的指令是相同的。
/********************************************************************************************************
**函数信息 :void GPIO_Config(void)
**功能描述 :GPIO初始化
**输入参数 :
**输出参数 :
** 备注 :将GPIO_PB5初始化为输出口
********************************************************************************************************/
void GPIO_Config(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_RESET);/*Configure GPIO pin : PB5 */GPIO_InitStruct.Pin = GPIO_PIN_5;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}然后在 main.c 的循环中调用 HAL_GPIO_TogglePin 函数,看一下效果。手头的开发板上驱动 LED3 的管脚是 PB5,灌流式连接。
/********************************************************************************************************
**函数信息 :void main(void)
**功能描述 :main函数
**输入参数 :
**输出参数 :
** 备注 :
********************************************************************************************************/
int main(void)
{HAL_Init(); // systick初始化GPIO_Config(); // Intialize GPIO PB5USART_Config(); // USART初始化
#if(0)MX_DMA_Init(); // Intialize DMA
#endifprintf("\r\n+---------------------------------------+""\r\n| PY32F003 MCU is ready. |""\r\n+---------------------------------------+""\r\n");/*通过中断方式发送数据*/if (HAL_UART_Transmit_IT(&UartHandle, (uint8_t *)aTxBuffer, 12) != HAL_OK){Error_Handler();}while (1){/*** For testing GPIO output* 2023-11-24* Hard coder Luoyuan*/HAL_Delay(1000);HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_5);}
}总结
OK,先这些内容。
- 将例程的所有文件集中在一个子目录中,方便其它开发者移植,打一个压缩包,随处打开即可,不需要把整个厂家软件包都压缩进去。
- 把 Drivers-->HAL_Drivers 拷贝到例程目录下。
- 根据 Keil 的组织规则重新安排文件组,重新设定 include 目录。
- CMSIS 只需要选中 Core,其它选项不必选择。
- PY32 的 GPIO 操作函数和 STM32 相同。
谢谢各位的关注和指点。
这篇关于普冉(PUYA)单片机开发笔记(2): Keil uVision工程的文件组织的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








