本文主要是介绍并发程序设计--D1进程的创建和回收,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
进程和程序内容区别
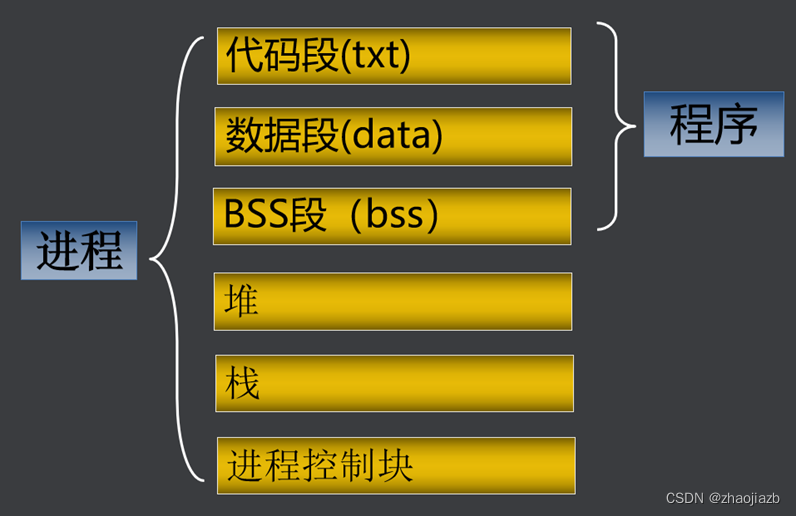
进程包含的内容:
BSS段:存放程序中未初始化的全局变量
数据段:已初始化的全局变量
代码段:程序执行代码
堆(heap):malloc等函数分配内存
栈(stack):局部变量,函数参数,函数的返回值
进程控制块(pcb):PID, 进程状态,进程优先级,文件描述符表
进程状态
运行态、等待态、停止态、死亡态
进程常用命令
ps 查看系统进程快照
top 查看进程动态信息
/proc 查看进程详细信息
ps 命令详细参数:
-e:显示所有进程
-l:长格式显示更加详细的信息
-f 全部列出,通常和其他选项联用
| 表头 | 含义 |
| F | 进程标志,说明进程的权限,常见的标志有两个:
|
| S | 进程状态。进程状态。常见的状态有以下几种:
|
| UID | 运行此进程的用户的 ID; |
| PID | 进程的 ID; |
| PPID | 父进程的 ID; |
| C | 该进程的 CPU 使用率,单位是百分比; |
| PRI | 进程的优先级,数值越小,该进程的优先级越高,越早被 CPU 执行; |
| NI | 进程的优先级,数值越小,该进程越早被执行; |
| ADDR | 该进程在内存的哪个位置; |
| SZ | 该进程占用多大内存; |
| WCHAN | 该进程是否运行。"-"代表正在运行; |
| TTY | 该进程由哪个终端产生; |
| TIME | 该进程占用 CPU 的运算时间,注意不是系统时间; |
| CMD | 产生此进程的命令名; |
top 查看进程动态信息
shift +> 后翻页
shift +< 前翻页
top -p PID 查看某个进程
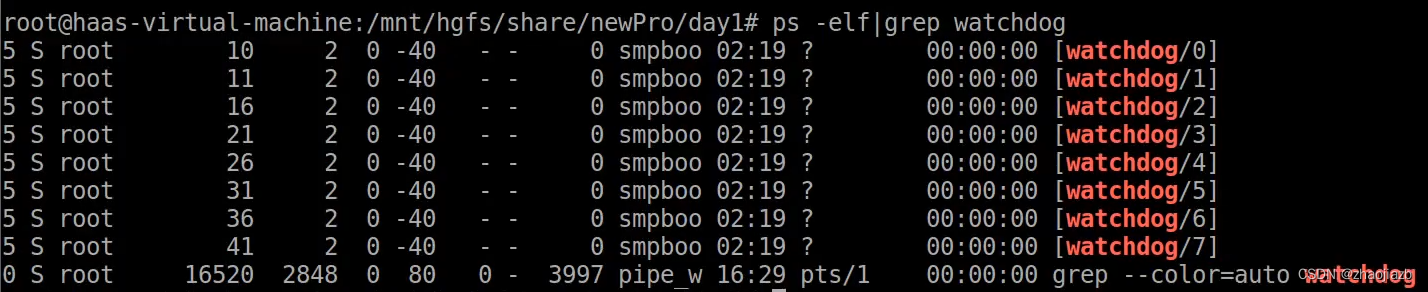
下面是使用ps查看具体进程,结合grep
改变进程优先级
nice 按用户指定的优先级运行进程
nice [-n NI值] 命令
NI 范围是 -20~19。数值越大优先级越低
普通用户调整 NI 值的范围是 0~19,而且只能调整自己的进程。
普通用户只能调高 NI 值,而不能降低。如原本 NI 值为 0,则只能调整为大于 0。
只有 root 用户才能设定进程 NI 值为负值,而且可以调整任何用户的进程。
renice 改变正在运行进程的优先级
renice [优先级] PID
其他命令
jobs 查看后台进程
bg 将挂起的进程在后台运行
fg 把后台运行的进程放到前台运行
ctrl+z 把运行的前台进程转为后台并停止。
./test & 把test程序后台运行
创建子进程
#include <unistd.h>
pid_t fork(void);
创建新的进程,失败时返回-1
成功时父进程返回子进程的进程号,子进程返回0
通过fork的返回值区分父进程和子进程
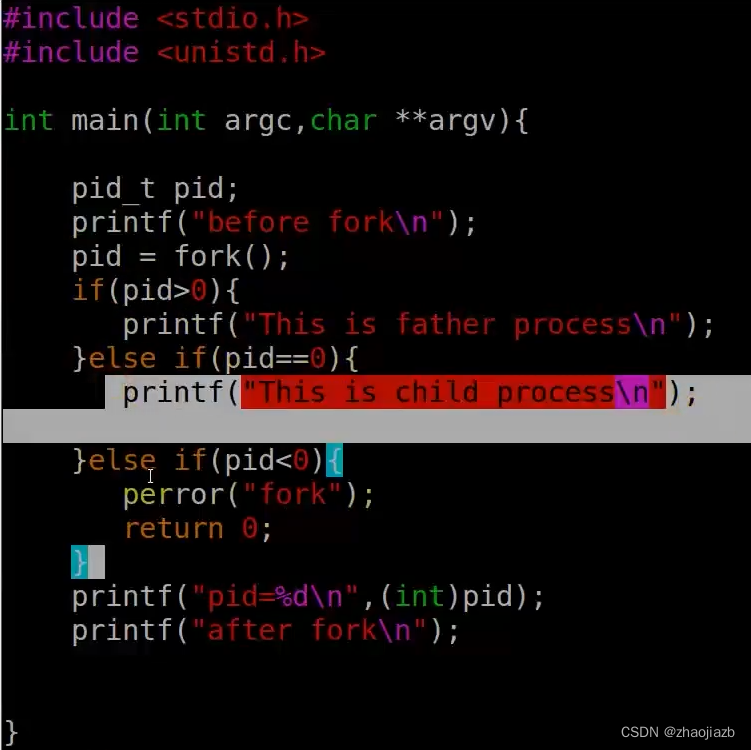
要点:1 子进程只执行fork之后的代码
2 父子进程执行顺序是操作系统决定的。
子进程继承了父进程的内容
父子进程有独立的地址空间,互不影响
若父进程先结束,子进程成为孤儿进程,被init进程收养,子进程变成后台进程
若子进程先结束,父进程如果没有及时回收,子进程变成僵尸进程
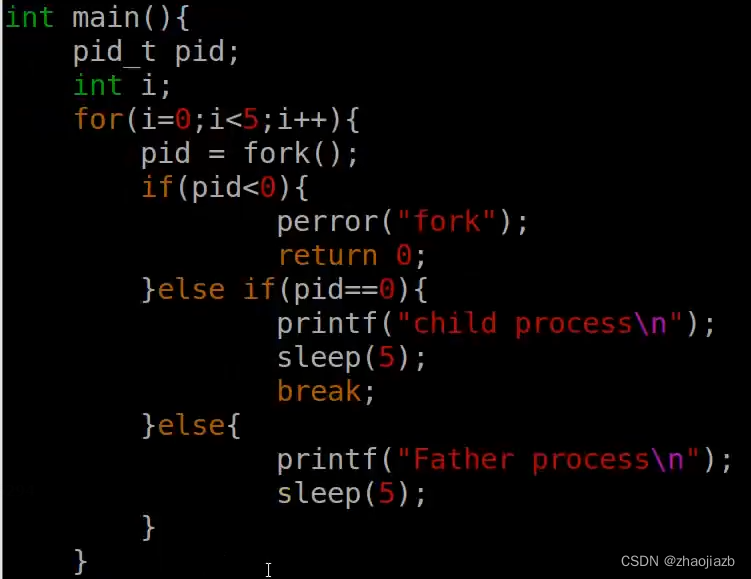
一个父进程创建多个子进程
进程的退出
#include <stdlib.h>
#include <unistd.h>
void exit(int status);//库函数
void _exit(int status);//系统调用
结束当前的进程并将status返回
exit结束进程时会刷新(流)缓冲区,_exit不会
return 和exit的区别
main函数结束时会隐式地调用exit函数,普通函数return是返回上一级。
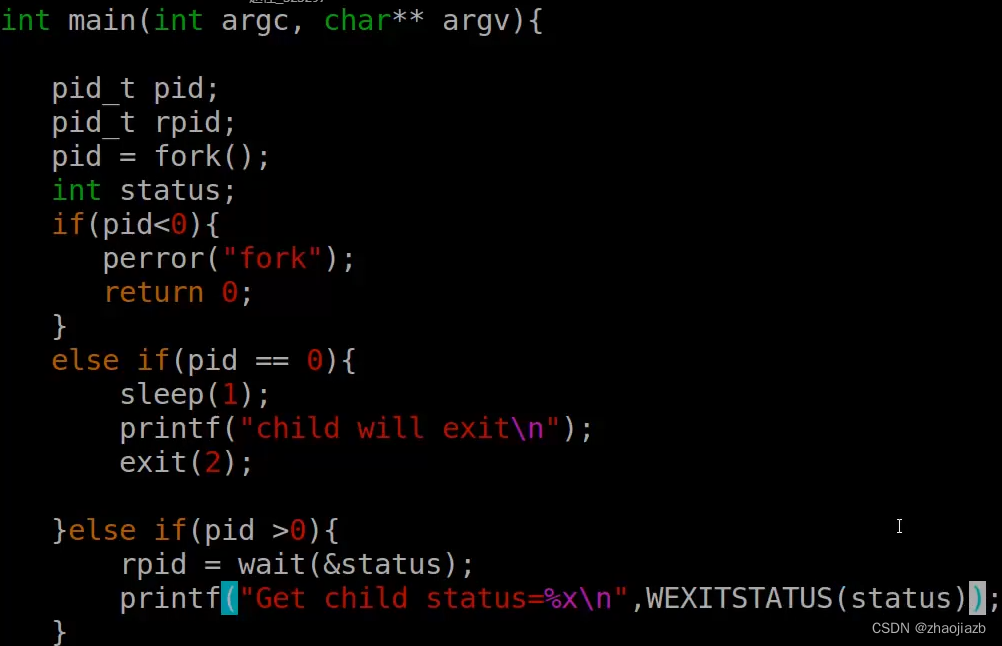
进程的回收
#include <unistd.h>
pid_t wait(int *status);
成功时返回回收的子进程的进程号;失败时返回EOF
若子进程没有结束,父进程一直阻塞
若有多个子进程,哪个先结束就先回收
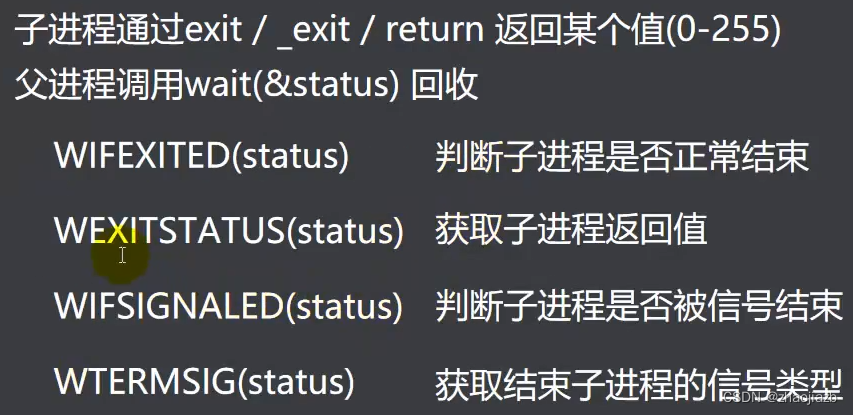
status 指定保存子进程返回值和结束方式的地址
status为NULL表示直接释放子进程PCB,不接收返回值
#include <unistd.h>
pid_t waitpid(pid_t pid, int *status, int option);
参数:
pid
pid>0时,只等待进程ID等于pid的子进程,不管其它已经有多少子进程运行结束退出了,只要指定的子进程还没有结束,waitpid就会一直等下去。
pid=-1时,等待任何一个子进程退出,没有任何限制,此时waitpid和wait的作用一模一样。
pid=0时,等待同一个进程组中的任何子进程,如果子进程已经加入了别的进程组,waitpid不会对它做任何理睬。
pid<-1时,等待一个指定进程组中的任何子进程,这个进程组的ID等于pid的绝对值。
options
options提供了一些额外的选项来控制waitpid,目前在Linux中只支持WNOHANG和WUNTRACED两个选项,这是两个常数,可以用"|"运算符把它们连接起来使用
WNOHANG :若由pid指定的子进程未发生状态改变(没有结束),则waitpid()不阻塞,立即返回0
WUNTRACED: 返回终止子进程信息和因信号停止的子进程信息
wait(wait_stat) 等价于waitpid(-1,wait_stat,0)

这篇关于并发程序设计--D1进程的创建和回收的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









