本文主要是介绍编译OpenSSL库(win10+msvc2019_x64),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
一般情况下,有很多第三方编译的openssl库,基本不需要自己,笔者本次记录下,使用msvc2019编译openssl,生成64位的库
一、准备环境
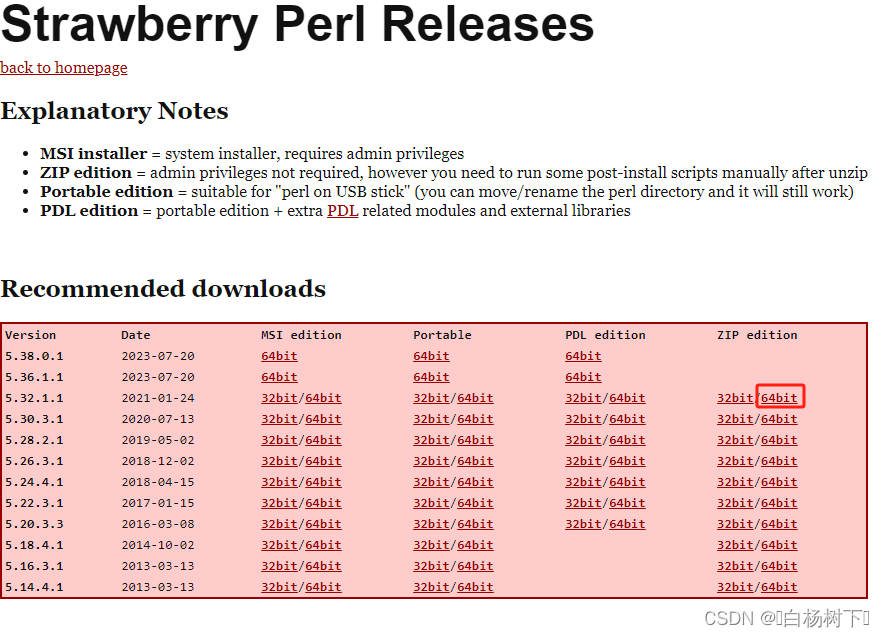
1.下载Perl
Strawberry Perl for Windows - Releases
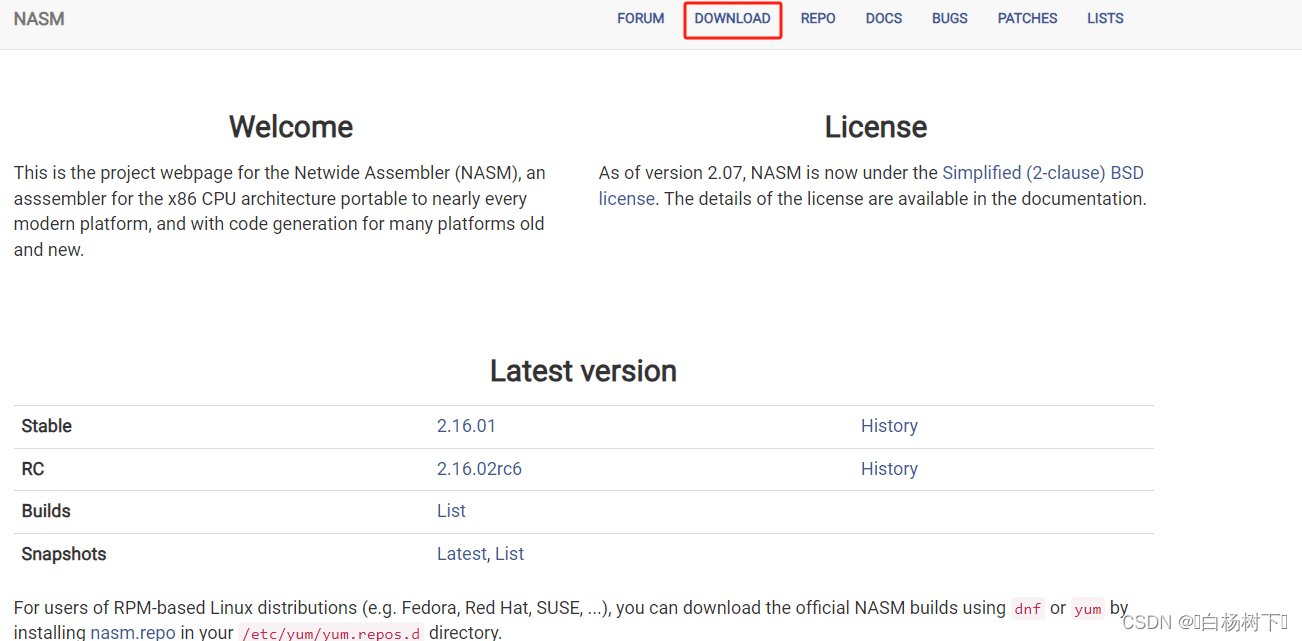
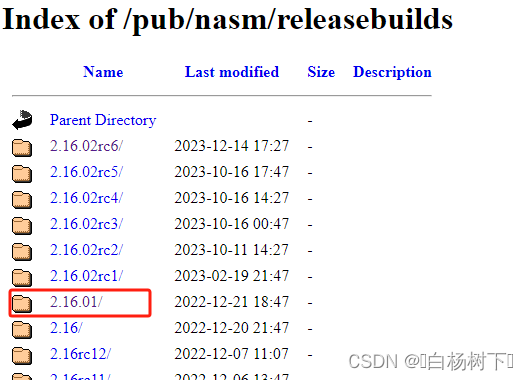
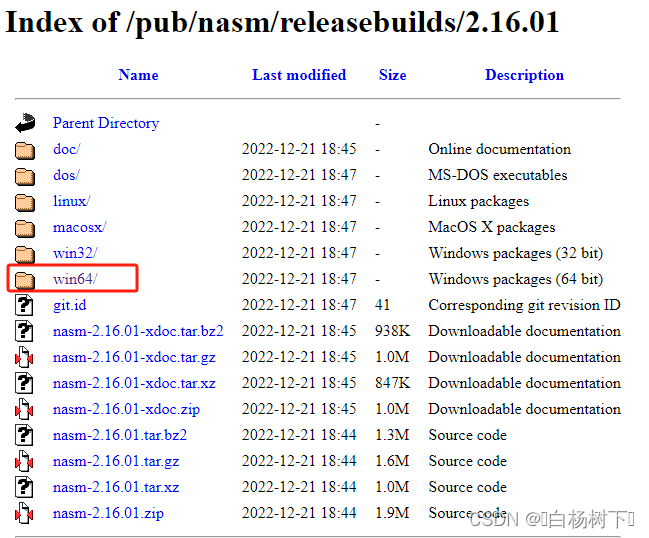
2.下载NASM
https://www.nasm.us/
3.安装vs2019
这个就不记录了,教程也很多
以上是笔者自己的版本,有需要的小伙伴,自己根据情况更换不同的版本就可以
二、下载源码
opessl官网 /index.html

三、配置环境变量
将下载的nasm和perl解压到指定的目录,目录最好不要有空格和中文
打开vs2019的命令编译行
笔者是编译64位的,小伙伴根据需要选择,当然也可以直接打开cmd,自己手工配置环境变量
在打开的控制台中,修改环境变量,加入nasm和perl的位置
set path={nasm_dir}\nasm-2.16.01;{perl_dir}\strawberry-perl-5.32.1.1-64bit\perl\bin;%path%四、编译
cd {openssl_dir}#若在openssl源码根目录
perl Configure VC-WIN64A shared --prefix="{openssl_dir}/install"#这步也可以不执行
nmake testnmake install编译过程比较简单,但记得,某些杀毒软件会影响正常编译,需要处理下
后记
笔者仅测试了64位的编译,未测试32位的,有需要的小伙伴可以自行测试下
这篇关于编译OpenSSL库(win10+msvc2019_x64)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







