本文主要是介绍ISDN帧格式介绍,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
- 前言
- 1BRI帧结构及其组帧
- 1 BRI帧结构
- 2 BRI组帧
- 2T1帧结构及其组帧
- 1 T1帧结构
- 2 T1组帧
- 3 T1告警介绍
- 4 T1-CAS信令解析
- 3E1帧结构及其组帧
- 1 E1帧结构
- 2 E1组帧
- 3 E1告警信号
前言
本篇文章对ISDN中的基本速率接口(BRI)和基群速率接口(E1、T1)的帧结构以及组帧方法进行介绍,这对理解他们的工作原理有很大的帮助。
1、BRI帧结构及其组帧
1.1 BRI帧结构
BRI帧的长度是48bit,帧周期250us,帧频4kHz,信号的传送速率为192kbit/s,两个传输方向上的帧结构略有不同。
1帧的48bit分配给B1、B2信道各16bit,D信道4bit,另外的12bit作为控制信号供定时、同步等功能使用。帧结构如下图所示
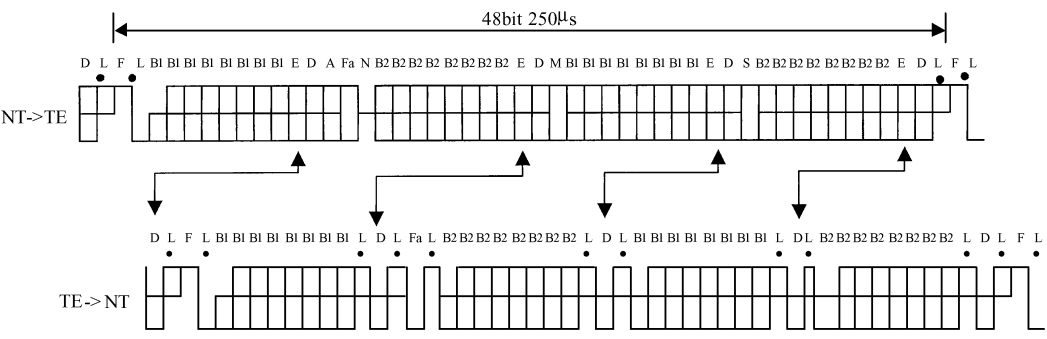
F:帧定位比特,1帧的第1bit,标志1帧的开始,总是正脉冲(相当于二进制“0”)。
L:直流平衡比特,它的作用是保持1帧内的正负脉冲数相等,也就是使1帧中总是含有偶数个二进制“0”。
E:D信道返回比特,它只包含在NT至TE方向的帧内,其作用是返回NT从TE刚收到的D信道比特上的二进制值。
N:辅助帧定位比特,它只包含在NT至TE方向的帧内,N= FA。
A:激活比特,用于S/T接口的激活。
M:复帧定位比特,用于复帧的定位。
D:信令通路数据,TE至NT1方向上,空闲时送二进制“1”。NT1至TE方向上,空闲时送二进制“1”或高级数据链路控制(HDLC)标识“01111110”。
FA:辅助帧定位比特,它的功能是帮助实现帧定位,其值总是“0”。
B1、B2:信息通路数据,空闲时送二进制“1”。
从图中可以看出,三个信道(二个64kbit/s的B信道和一个16kbit/s的D信道)以同步时分的方式复用在同一条线路上,其信号组织成固定长度的帧,并按照一定的周期重复传送。1.2 BRI组帧
每20帧构成1个复帧,也就是复帧的帧周期为5ms,频率为200Hz。
2、T1帧结构及其组帧
我们知道E1的TS0信道是用来进行帧同步的,而T1中并没有专门用来进行帧同步的信道,那么T1线路是如何进行帧同步的呢,这与T1的帧结构和组帧方式息息相关。
2.1 T1帧结构
T1共有24个信道(23B+D),每一个语音信道采用8位插值采样,24个语音信道加上一个数据分帧位(用于标识帧的结束和下一帧的开始),总共8×24+1=193bit,构成一个帧。因为每秒钟采样8000次,也就是说每秒钟产生8000个帧,那么每秒钟速率就是193×8 000/1000000=1.544Mbps。标准T1帧格式如下图所示,其中包括23个信道用于数据传输,1个信道用于信令控制,另加一个分帧位,共193bit。
2.2 T1组帧
T1的组帧方法有D4和ESF两种。
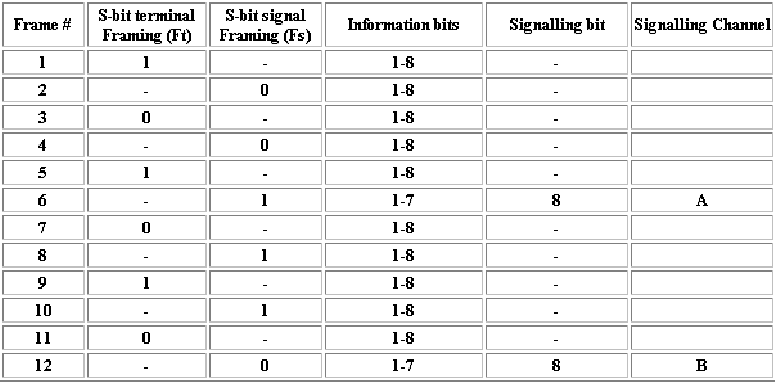
在一正常的 T1 帧中,192 位用于数据,1个位用于组帧。但是在T1中这个单独的位不能简单自如地来传送保持T1线路同步的信令信息。因此,人们创建了超帧格式(superframe format,SF)来处理这个问题。SF也就是D4,由12个T1帧组成,这12个组帧位要经历下面的 12位模式:100011011100。也就是说,第1个帧中的组帧位为1,下面3个帧的组帧位为0,再下两个帧的组帧位为1,直到12位模式结束。一旦到达了最后,就再重新开始。接收器通过在12个帧的每193个位中寻找这种特定的模式,就可以建立帧的同步。SF帧的12位控制字的奇数位(称为Ft位,对应帧称为终端帧)用来标志帧和超帧边界以便接收设备能够正确的处理用户数据;控制字的偶数位(称为Fs位,对应帧称为信令帧)用来携带信令标志。其格式如下图所示:
另一种组帧方法,称为T1扩展超帧格式(extendedsuperframeformat,ESF)。在ESF中,24个帧组成一组,产生24个组帧位。这些组帧位可分解为以下3种功能:
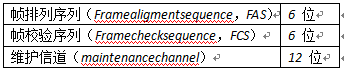
FAS在其6位中使用了一种重复的模式(001011),以确保帧进行了正确的同步。如果接收器失去了同步(滑动, slip),它将在下面的5个帧中查找到相应的位的模式(24个T1帧每ESF帧*5个ESF 帧=120个帧)。
FCS只用于错误检测,而不能进行错误校正。
维护信道,也称为设备数据链接(FacilitiesDataLink,FDL),是一个 4Kbps 的附带信道,用于网络维护和操作。然而,PRI并不对该信道有何具体操作。
ESF帧格式和D4帧格式基本相同,如下图所示:
2.3 T1告警介绍
- 故障告警:
LOS(Loss of Signal:信号丢失)。T1的LOS也叫Red Alarm:红色告警。
AIS(Alarm Indication Signal:告警指示信号)。T1的AIS也叫Blue Alarm:蓝色告警。
RAI(Remote Alarm Indication:远端告警指示)。RAI也叫Yellow Alarm:黄色告警。
LFA(Loss of frame alignment:帧失步)- 事件告警:
CRC6 Error(CRC6 检测错)
BER of Frame Alignment > 1e-3(帧定位信号误码率过大)
Slip(滑码)2.4 T1-CAS信令解析
T1线路一般采用E&M随路信令,当然,E&M信令也可以用于E1线路。
在语音实施过程当中,T1 在每第六个帧循环中插入信令信息。每第六个帧中每个信道的最低有效位(LSB)用于携带信令,如下图所示:
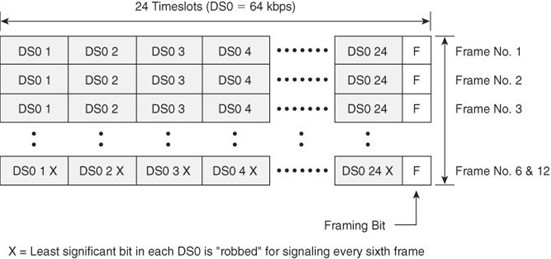
当然,这种方式肯定会对整个语音的质量有所影响(因为这里只能用 7 个 bit 来描述采样数据)但影响不会很明显,因为最后一位的变化对数值的影响不大。这种方式称之为夺位信令(Robbed-bit Signaling,RBS)。由于信令在每个通道中都有出现,所以我们也称之为带内信令。并且,由于这些位是专门保留给各自的语音通道,所以又称之为 CAS。
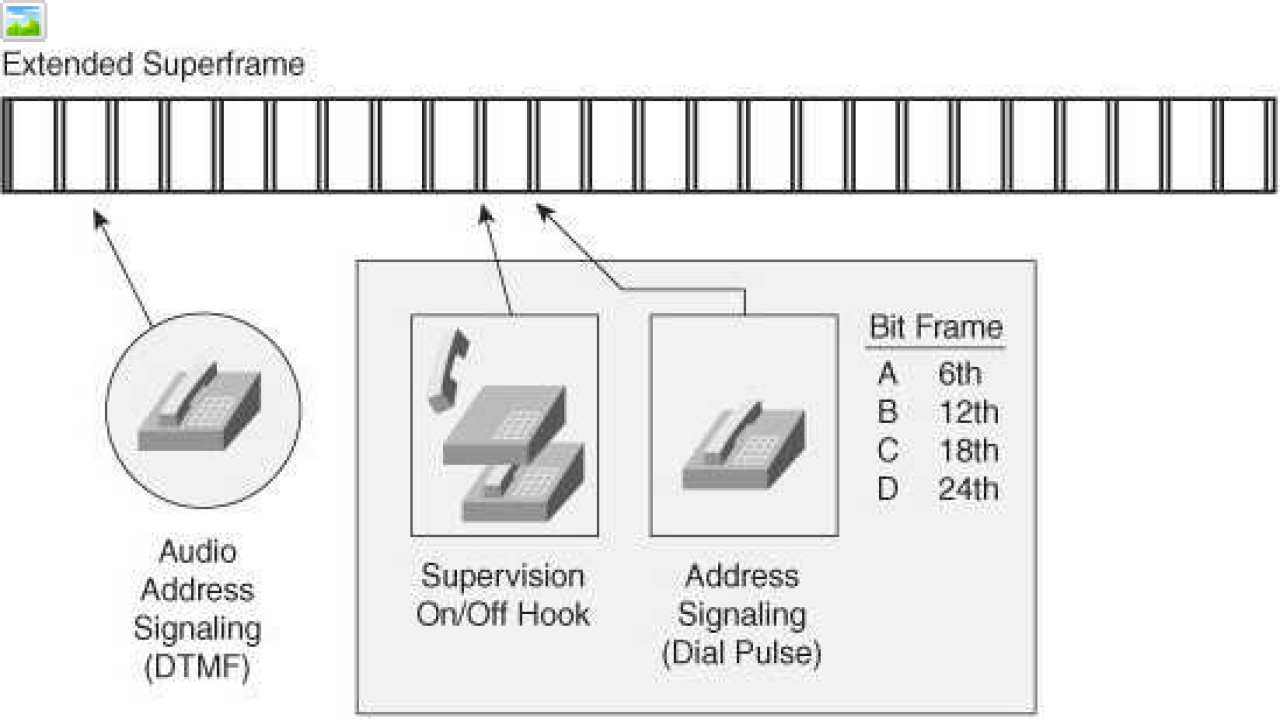
若在 SF 中实施这种方法,在第六个帧中实现 A bit,第 12 帧中实现 b bit。对于语音控制来说,A 和 B 这两个 bit 可以提供近端和远端的摘机提示。A,B bit 能够表示不同的信令状态或控制特性(on-hook,off-hook,idle,busy,ringing,addressing)。
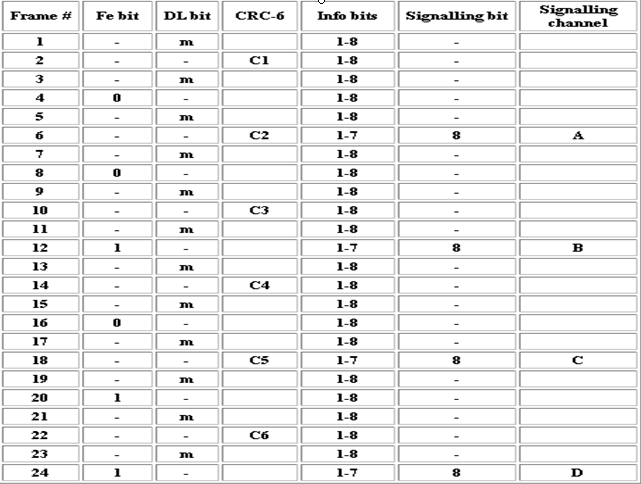
ESF 在 6,12,18,24 帧中使用 RBS,所以它可以提供一些附加的信令信息,这四个 bit 可以称之为 ABCD bit。下图中所示的,就是ESF在RBS 中的被夺取位,可以用来携带 E&M 或者 FSX/FXO 的状态信息,这些状态信息可以实现呼叫的管理,虽然 DTMF 或音频信息使用数据通道传递,但是其他的管理信令必须使用 CAS。

3、E1帧结构及其组帧
3.1 E1帧结构
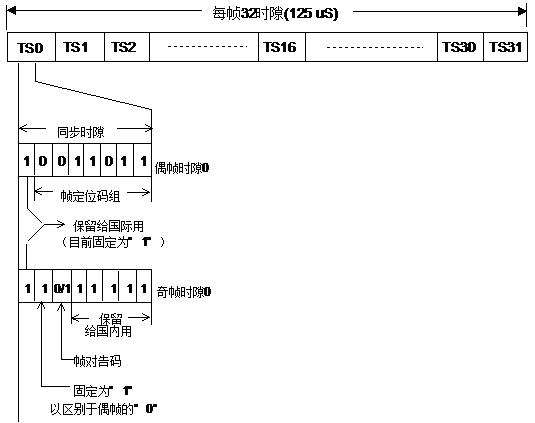
E1有成帧,成复帧与不成帧三种方式,在成帧的E1中第0时隙用于传输帧同步数据,其余31个时隙可以用于传输有效数据;在成复帧的E1中,除了第0时隙外,第16时隙是用于传输信令的,只有第1到15,第17到第31共30个时隙可用于传输有效数据;而在不成帧的E1中,所有32个时隙都可用于传输有效数据。如下图所示:

在E1信道中,8bit组成一个时隙(TS,也就是前面所说的”8位插值采样”),32个时隙的编号就是TS0~TS31,32个时隙组成了一个帧(F)。
在一个帧中,TS0主要用于传送帧定位信号(FAS)、CRC-4(循环冗余校验)和对端告警指示,TS16主要传送随路信令(CAS)、复帧定位信号和复帧对端告警指示,用户不可用来传输数据。TS1~TS15和TS17~TS31共30个时隙传送话音或数据等信息。我们称TS1~TS15和TS17~TS31为”净荷”,TS0和TS16为”开销”。如果采用带外公共信道信令(CCS),TS16就失去了传送信令的用途,该时隙也可用来传送信息信号,这时帧结构的净荷为TS1~TS31,开销只有TS0了。
所谓”带外”是指所用信道不在线路总频带内,而是另外开辟一个信道,这样就节省了这部分的开销。与之对应的就是”带内”,它就是指所用信道在线路的总频带内。
奇偶帧是E1基本帧格式,被称为“双帧格式” 。在奇偶帧中,TS0发送的内容是不一样的,如下图所示:
根据以上各时隙的不同用途,我们可以把E1线路的PCM编码分为以下几种。
PCM30:PCM30用户可用时隙为30个,即TS1~TS15和TS17~TS31。采用带内公共信道方式,TS16传送信令,无CRC校验。
PCM31:PCM31用户可用时隙为31个,即TS1~TS15和TS16~TS31。采用带外公共信道方式,TS16不传送信令,无CRC校验。
PCM30C:PCM30C用户可用时隙为30个,即TS1~TS15和TS17~TS31。采用带内公共信道方式,TS16传送信令,有CRC校验。
PCM31C:PCM31C用户可用时隙为31个,即TS1~TS15和TS16~TS31。采用带外公共信道方式,TS16不传送信令,有CRC校验。3.2 E1组帧
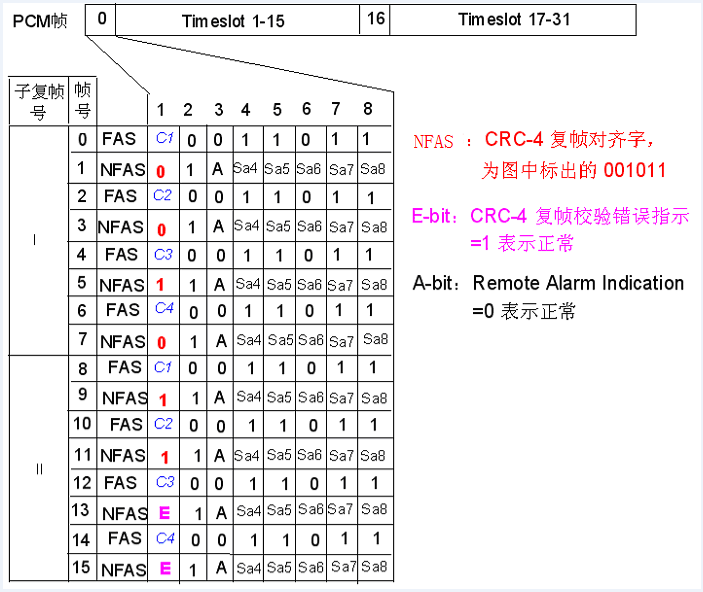
在E1线路中,32个时隙组成了一个帧(F),16个帧组成一个复帧(MF)。E1复帧格式包括CAS复帧格式和CRC4复帧格式。CAS复帧已基本不使用,CRC-4复帧由ITU-T G.704建议使用 。所以,E1常用的组帧方法有CRC4 和NO-CRC4两种。
CRC4复帧中TS0时序格式如下图所示:
CAS复帧TS16时序介绍:
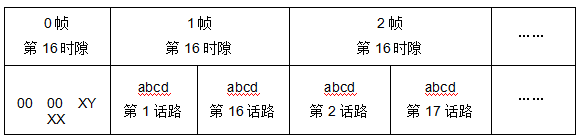
CAS信令的特点是一个CRC复帧中每一帧(不包括第0帧)的TS16被拆分为高4位和低4位,分别对应不同的语音通道的控制命令,譬如第1帧TS16的高4位就是第1通道的信令,低4位就是第16通道的信令。这样一个CRC复帧,去掉0帧后,还有15帧,正好对应了30个E1通道。而第0帧的TS16前4个比特用作复帧同步,后4个比特中用一个比特作复帧失步对告。CAS复帧中TS16的分配情况如下图所示:
3.3 E1告警信号
- 故障告警:
LOS(Loss of signal:信号丢失)
AIS(Alarm Indication Signal:告警指示信号)
LFA(Loss of frame alignment:帧失步)
RAI(Remote Alarm Indication:远端告警指示)
LMFA(Loss of Mulitframe Alignment:复帧失步)
RMFA(Remote Multiframe Alignment:复帧对告)
TS16-AIS(TS16 Alarm Indication Signal:16时隙AIS信号)- 事件告警:
CRC4 Error(CRC4检测错)
BER of Frame Alignment > 1e-3(帧定位信号误码率过大)
Slip(滑码)
这篇关于ISDN帧格式介绍的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








