本文主要是介绍【实验记录】(杂七杂八),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.基于视觉语义路标的智能手机室内定位与建图研究_高煜昕
p19 介绍了智能终端的数据集ADVIO数据集,使用iPhone采集,针对视觉和惯导联合开发,具有描述真是复杂场景以及高质量真值的优点。
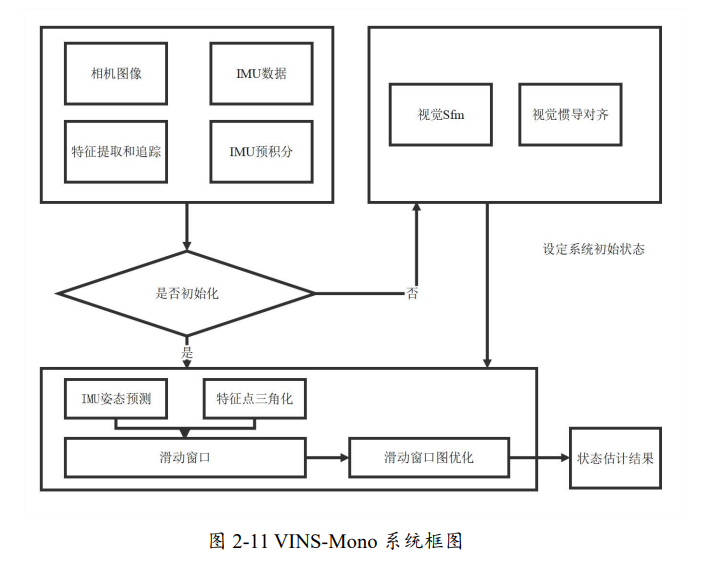
p20 论证了vins-mono、vins-fusion和orb-slam3等主流slam框架的性能, 对比发现后vins-mono运行ADVIO数据集时的定位与建图更优秀。
突发奇想:用双目视觉的回环后的值可以做“真值”吗?
2.A Continuous Positioning Algorithm Based on RTK and VI-SLAM With Smartphones
||| 实验手机为小米8,利用kalibr标定,校准过程中应该保证有良好的光照,减少光线不稳定引起的曝光和运动模糊。
imu_utils校准的参数是乐观的,因为他们是根据静态传感器计算的。根据经验,直接实用配置参数进行实验,vinsmono性能会很差。
小米8的传感器成本低廉,动态性能较差。用户应该放大噪声参数,以便vinsmono不会过于相信有巨大噪声的imu测量结果。
小论文还能贴出配置过程参数?!


|V 结论和展望:
未来,我们将把RTK和VI-SLAM的输出更紧密地耦合起来。我们还将开发我们的应用程序来收集其他星座和其他传感器(如磁力计)的测量结果。
3.Porting A Visual Inertial SLAM Algorithm To Android Devices
摘要: Android 在所有移动操作系统中拥有最大的市场份额,作为目标平台特别受关注。
3.1:
These two different inputs led to the calibration results printed in Table 1 & 2. As can be seen, the reprojection error from the printed checkerboard is quite large compared to the one from the screen checkerboard. The reason for that is presumably that the printed paper had built up slightly uneven waves due to the large amount of printer ink. The surface not being completely flat caused the error to be more than twice as big. Modern flat-panel displays serve the purpose of a perfect plane reasonably well.
可以看出,与显示器屏幕的重投影误差相比,印刷棋盘的误差要打大。其原因大概是由于打印机墨水量较多,打印的纸张上出现了轻微不均匀的波浪。表面不完全平坦导致误差增加两倍以上。现代平板显示器相当好の实现了完美平面的目的。

5.2 实验表现
由于传感器输入对框架的质量和性能都有直接影响,因此使用公开数据集进行比较没有什么意义。
相反,选择了在实际条件下进行测试,将不同的平台暴露在相同的环境条件下。
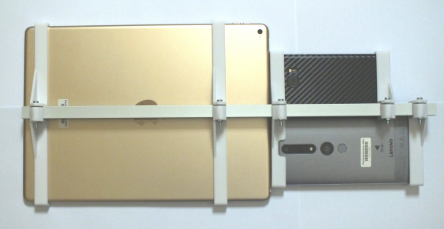
当然,从物理上讲,不可能产生完全相同的条件,因为摄像机不可能全部位于同一位置。为了提供尽可能最佳的近似值,设计了一种可以将设备牢固地固定在其上的测试装置。
这篇关于【实验记录】(杂七杂八)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








