本文主要是介绍CGAN原理讲解与源码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.CGAN原理
生成器,输入的是c和z,z是随机噪声,c是条件,对应MNIST数据集,要求规定生成数字是几。
输出是生成的虚假图片。
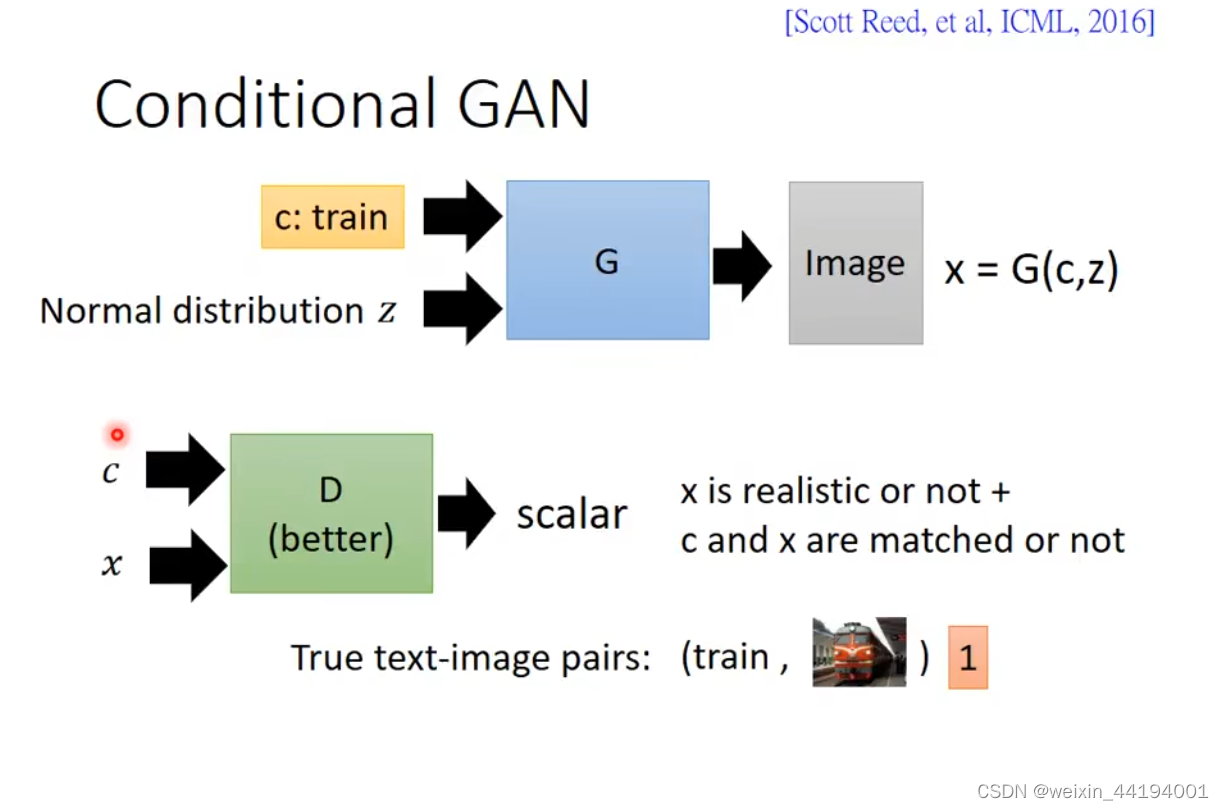
判别器的输入是
1.生成器输出的虚假图片x;
2.对应图片的标签c
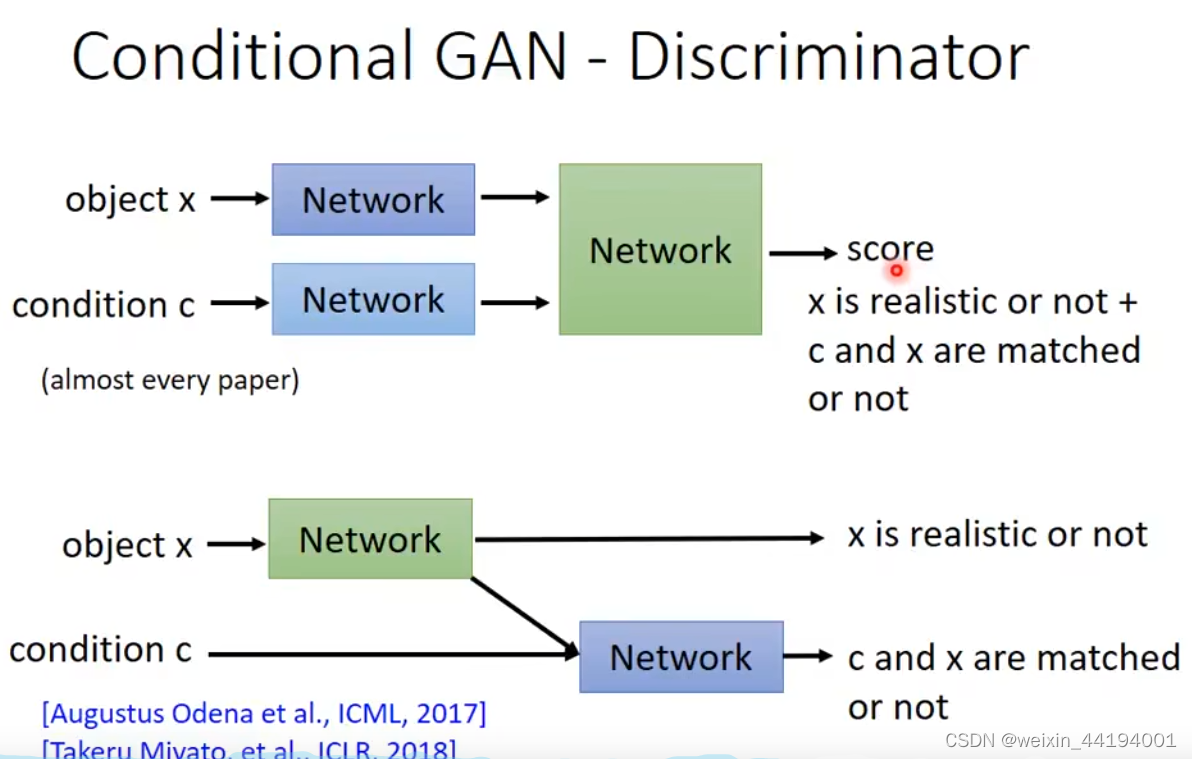
来自真实数据集,且标签是对的,就是1
如果是生成器生成的虚假照片就直接是1,都不需要看是否与标签对应
上面第二张图的意思就是,当图片是来自真实数据集,再来看是否与标签对应
2.CGAN损失函数

上面这个值,生成器越小越好,即判别器认为真实图片是真实图片的概率越低越好,认为虚假图片是真实图片的概率越高越好
判别器越大越好,即判别器认为真实图片是真实图片的概率越大越好,认为虚假图片是真实图片的概率越小越好
criterion(output, label)
在判别器中,
1)output是预测来自真实数据集的图片和标签是否是真实且符合标签的概率,label是1
2)output是预测虚假图片是否是虚假图片的概率,label是0
在生成器中,
output是判别器预测虚假图片是否是真实图片的概率,label是1
以上三种,都是交叉熵越小越好
3.生成器和判别器的源码
class Generator(nn.Module):def __init__(self, num_channel=1, nz=100, nc=10, ngf=64):super(Generator, self).__init__()self.main = nn.Sequential(# 输入维度 110 x 1 x 1nn.ConvTranspose2d(nz + nc, ngf * 8, 4, 1, 0, bias=False),nn.BatchNorm2d(ngf * 8),nn.ReLU(True),# 特征维度 (ngf*8) x 4 x 4nn.ConvTranspose2d(ngf * 8, ngf * 4, 4, 2, 1, bias=False),nn.BatchNorm2d(ngf * 4),nn.ReLU(True),# 特征维度 (ngf*4) x 8 x 8nn.ConvTranspose2d(ngf * 4, ngf * 2, 4, 2, 1, bias=False),nn.BatchNorm2d(ngf * 2),nn.ReLU(True),# 特征维度 (ngf*2) x 16 x 16nn.ConvTranspose2d(ngf * 2, ngf, 4, 2, 1, bias=False),nn.BatchNorm2d(ngf),nn.ReLU(True),# 特征维度 (ngf) x 32 x 32nn.ConvTranspose2d(ngf, num_channel, 4, 2, 1, bias=False),nn.Tanh()# 特征维度. (num_channel) x 64 x 64)self.apply(weights_init)def forward(self, input_z, onehot_label):input_ = torch.cat((input_z, onehot_label), dim=1)n, c = input_.size()input_ = input_.view(n, c, 1, 1)return self.main(input_)class Discriminator(nn.Module):def __init__(self, num_channel=1, nc=10, ndf=64):super(Discriminator, self).__init__()self.main = nn.Sequential(# 输入维度 (num_c3# channel+nc) x 64 x 64 1*64*64的图像和10维的类别 10维类别先转换成10*64*64 然后合并就是11*64*64# 输入通道 输出通道 卷积核的大小 步长 填充#原始输入张量:b 11 64 64nn.Conv2d(num_channel + nc, ndf, 4, 2, 1, bias=False), #b 64 32 32nn.LeakyReLU(0.2, inplace=True),# 特征维度 (ndf) x 32 x 32nn.Conv2d(ndf, ndf * 2, 4, 2, 1, bias=False), #b 64*2 16 16nn.BatchNorm2d(ndf * 2),nn.LeakyReLU(0.2, inplace=True),# 特征维度 (ndf*2) x 16 x 16nn.Conv2d(ndf * 2, ndf * 4, 4, 2, 1, bias=False), #b 64*4 8 8nn.BatchNorm2d(ndf * 4),nn.LeakyReLU(0.2, inplace=True),# 特征维度 (ndf*4) x 8 x 8nn.Conv2d(ndf * 4, ndf * 8, 4, 2, 1, bias=False), #b 64*8 4 4nn.BatchNorm2d(ndf * 8),nn.LeakyReLU(0.2, inplace=True),# 特征维度 (ndf*8) x 4 x 4nn.Conv2d(ndf * 8, 1, 4, 1, 0, bias=False), #b 1 1 1 其实就是一个数值,区间在正无穷到负无穷之间nn.Sigmoid())self.apply(weights_init)def forward(self, images, onehot_label):device = 'cuda' if torch.cuda.is_available() else 'cpu'h, w = images.shape[2:]n, nc = onehot_label.shape[:2]label = onehot_label.view(n, nc, 1, 1) * torch.ones([n, nc, h, w]).to(device)input_ = torch.cat([images, label], 1)return self.main(input_)4.训练过程
MODEL_G_PATH = "./"
LOG_G_PATH = "Log_G.txt"
LOG_D_PATH = "Log_D.txt"
IMAGE_SIZE = 64
BATCH_SIZE = 128
WORKER = 1
LR = 0.0002
NZ = 100
NUM_CLASS = 10
EPOCH = 10data_loader = loadMNIST(img_size=IMAGE_SIZE, batch_size=BATCH_SIZE) #原始图片宽高是28*28的,给改变成64*64
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
netG = Generator().to(device)
netD = Discriminator().to(device)
criterion = nn.BCELoss()
real_label = 1.
fake_label = 0.
optimizerD = optim.Adam(netD.parameters(), lr=LR, betas=(0.5, 0.999))
optimizerG = optim.Adam(netG.parameters(), lr=LR, betas=(0.5, 0.999))g_writer = LossWriter(save_path=LOG_G_PATH)
d_writer = LossWriter(save_path=LOG_D_PATH)fix_noise = torch.randn(BATCH_SIZE, NZ, device=device)
fix_input_c = (torch.rand(BATCH_SIZE, 1) * NUM_CLASS).type(torch.LongTensor).squeeze().to(device)
fix_input_c = onehot(fix_input_c, NUM_CLASS)img_list = []
G_losses = []
D_losses = []
iters = 0print("开始训练>>>")
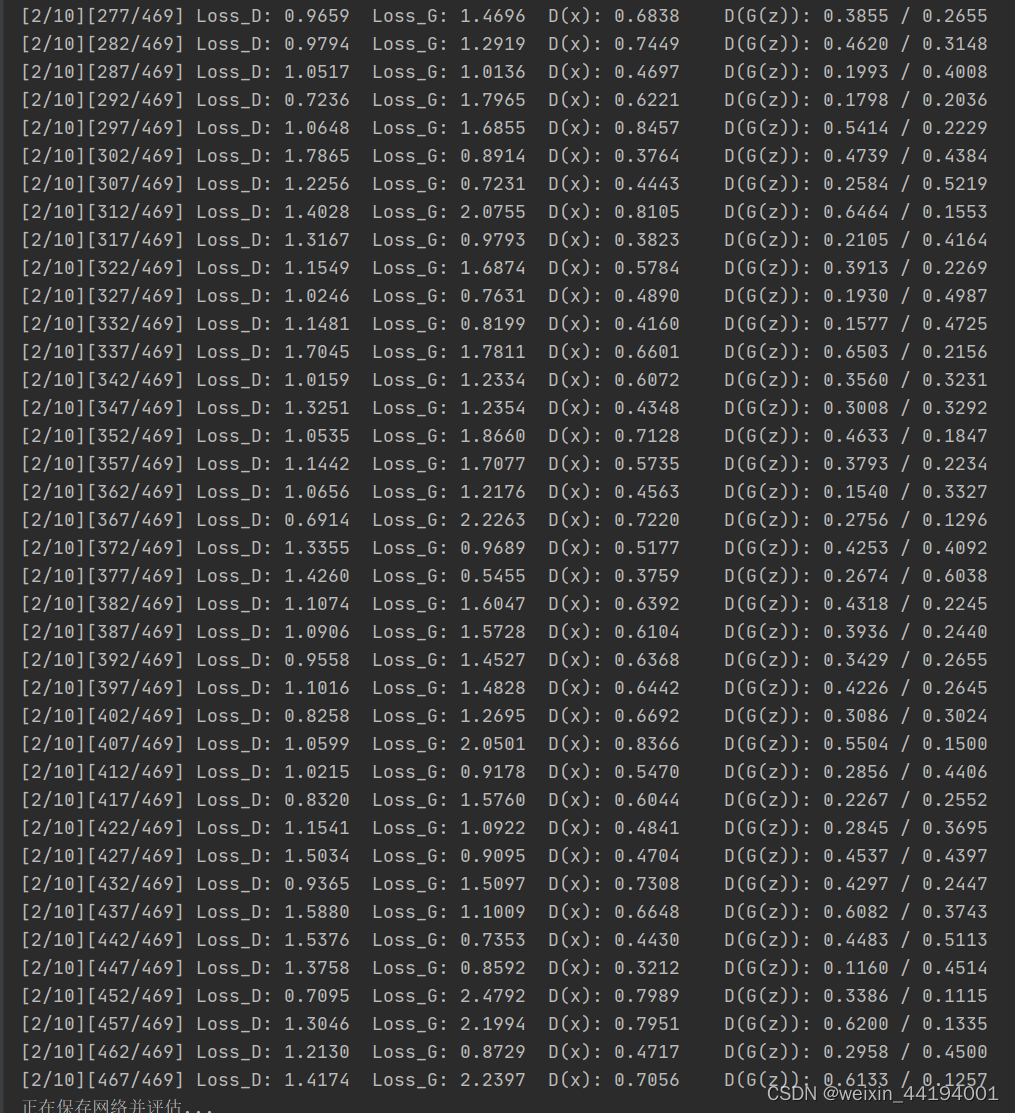
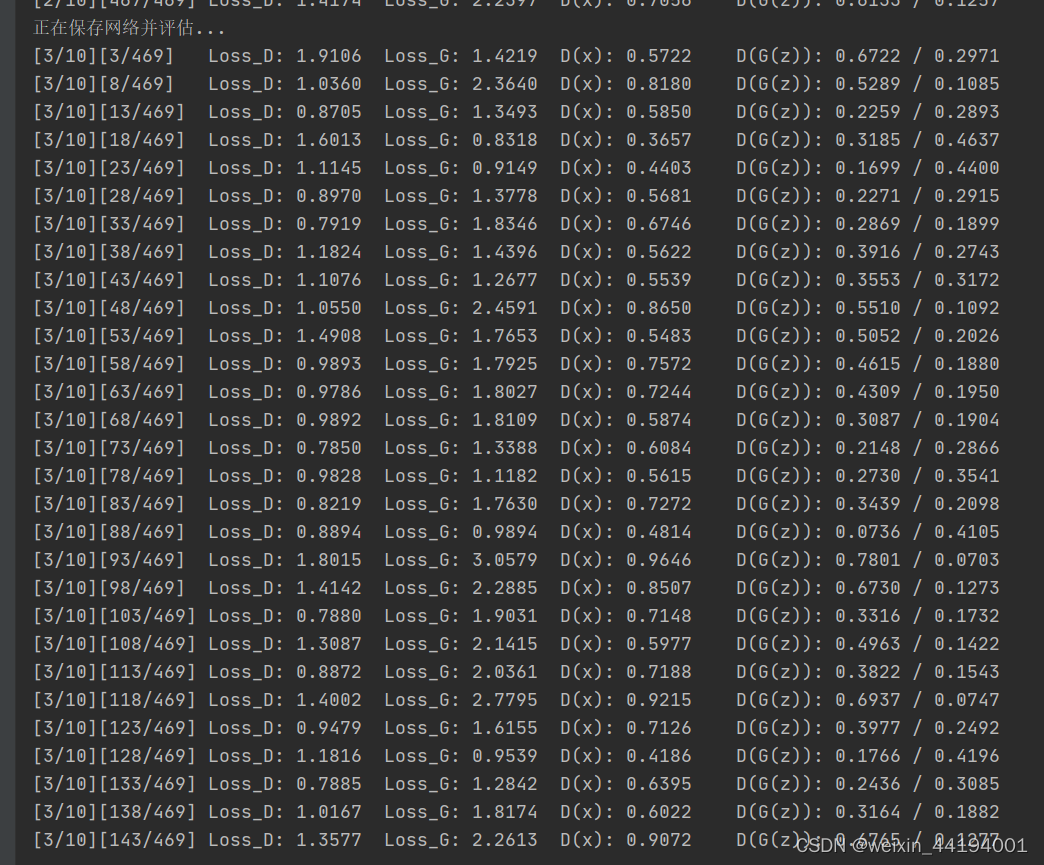
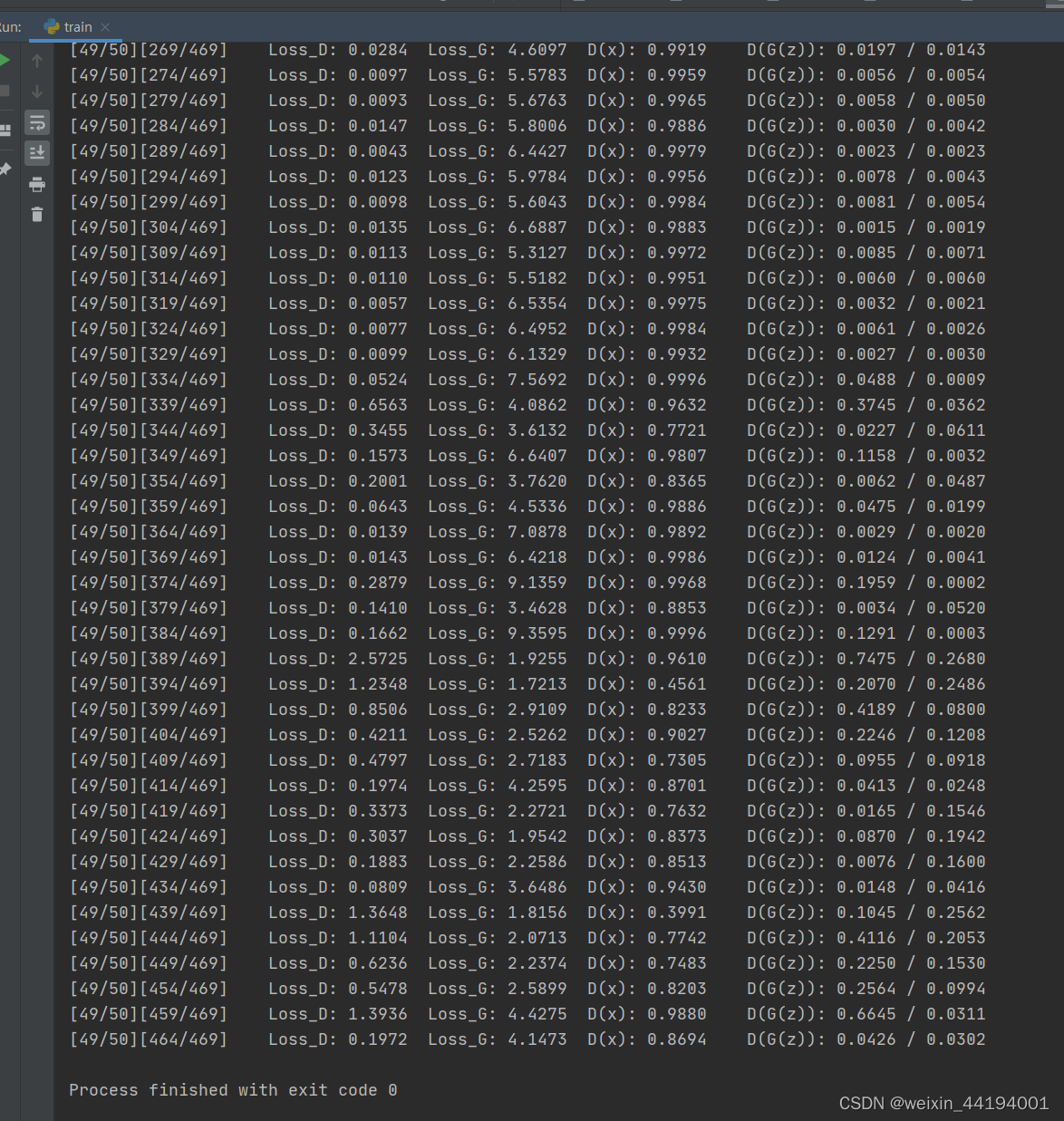
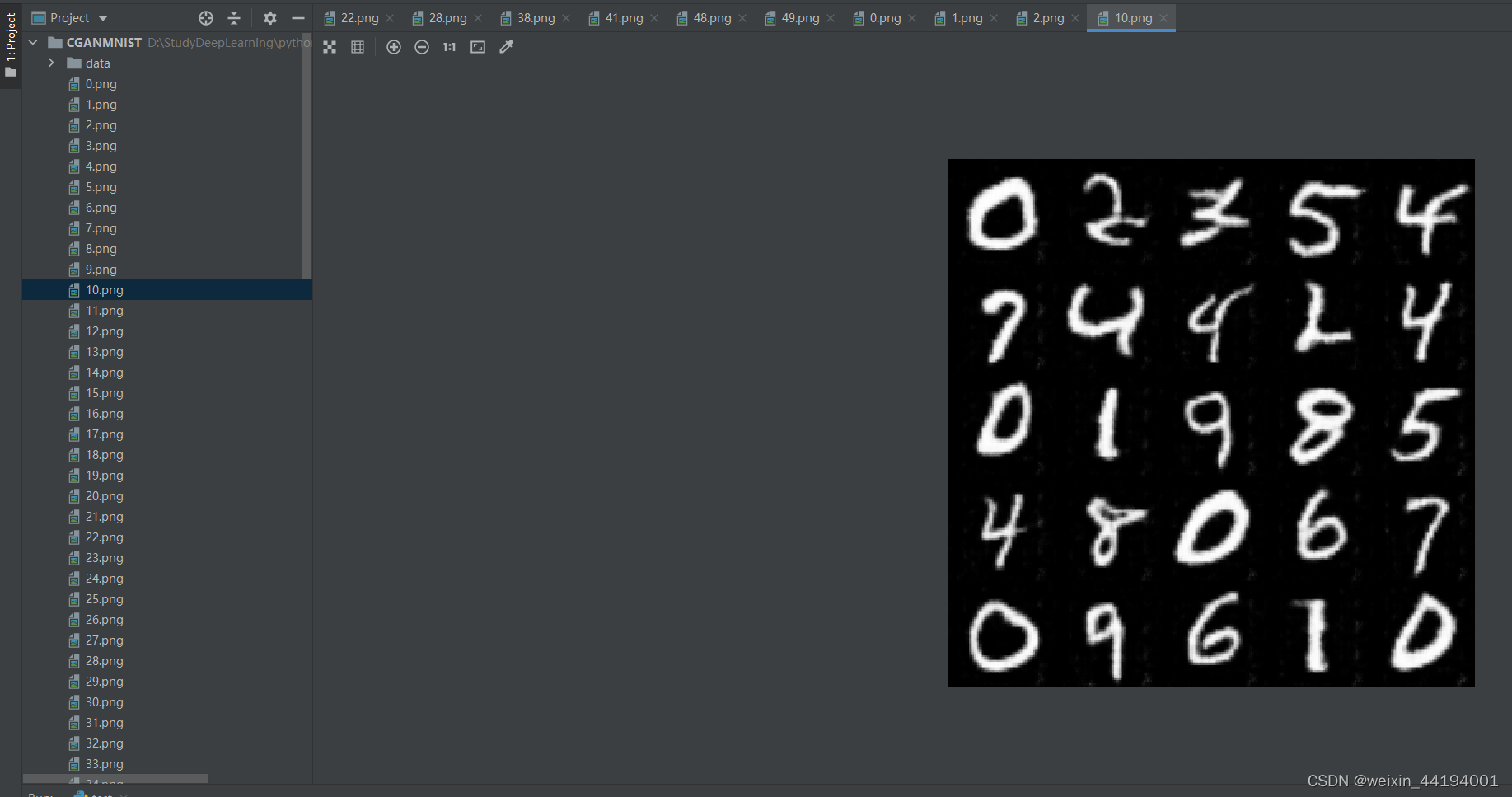
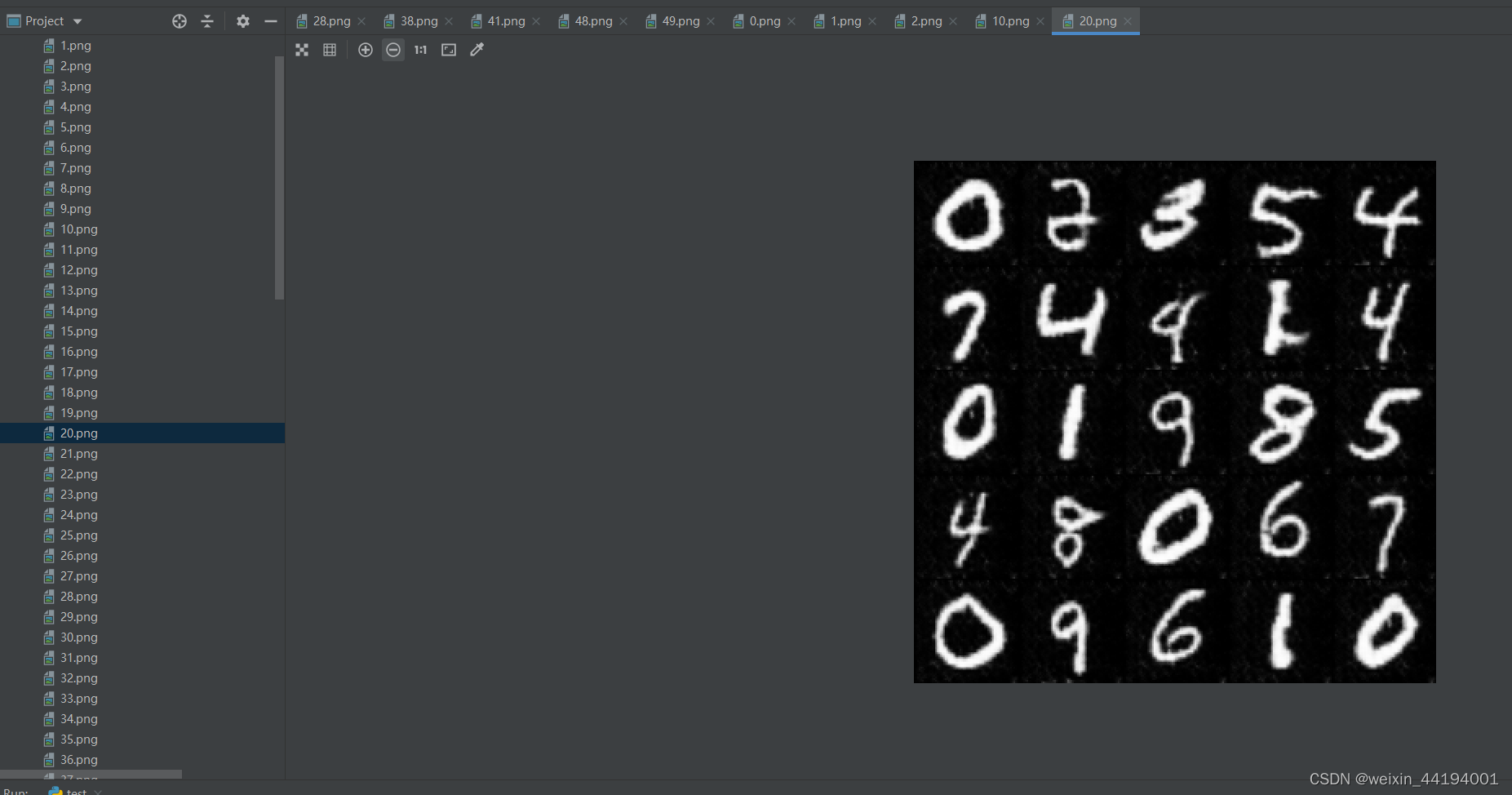
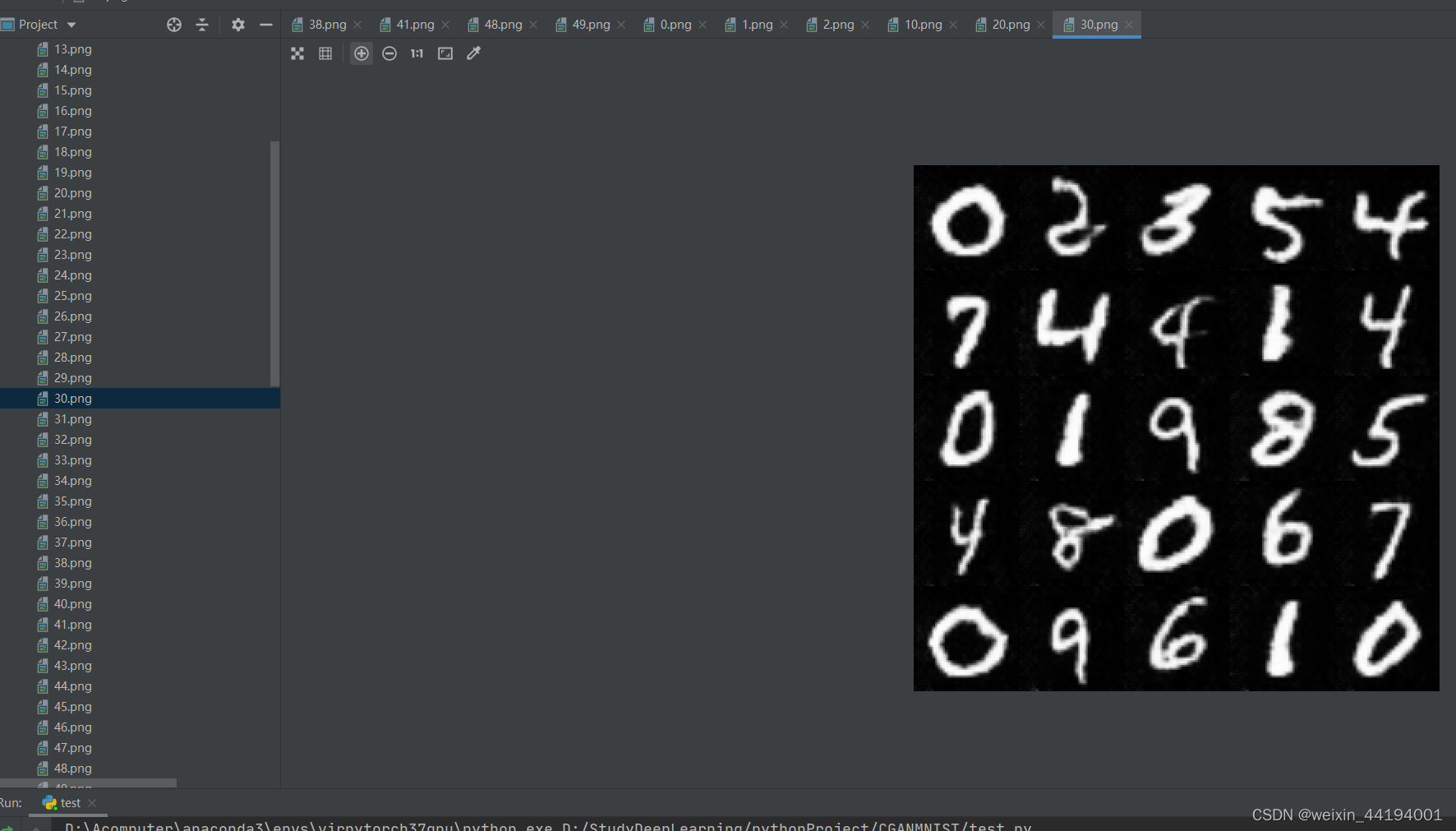
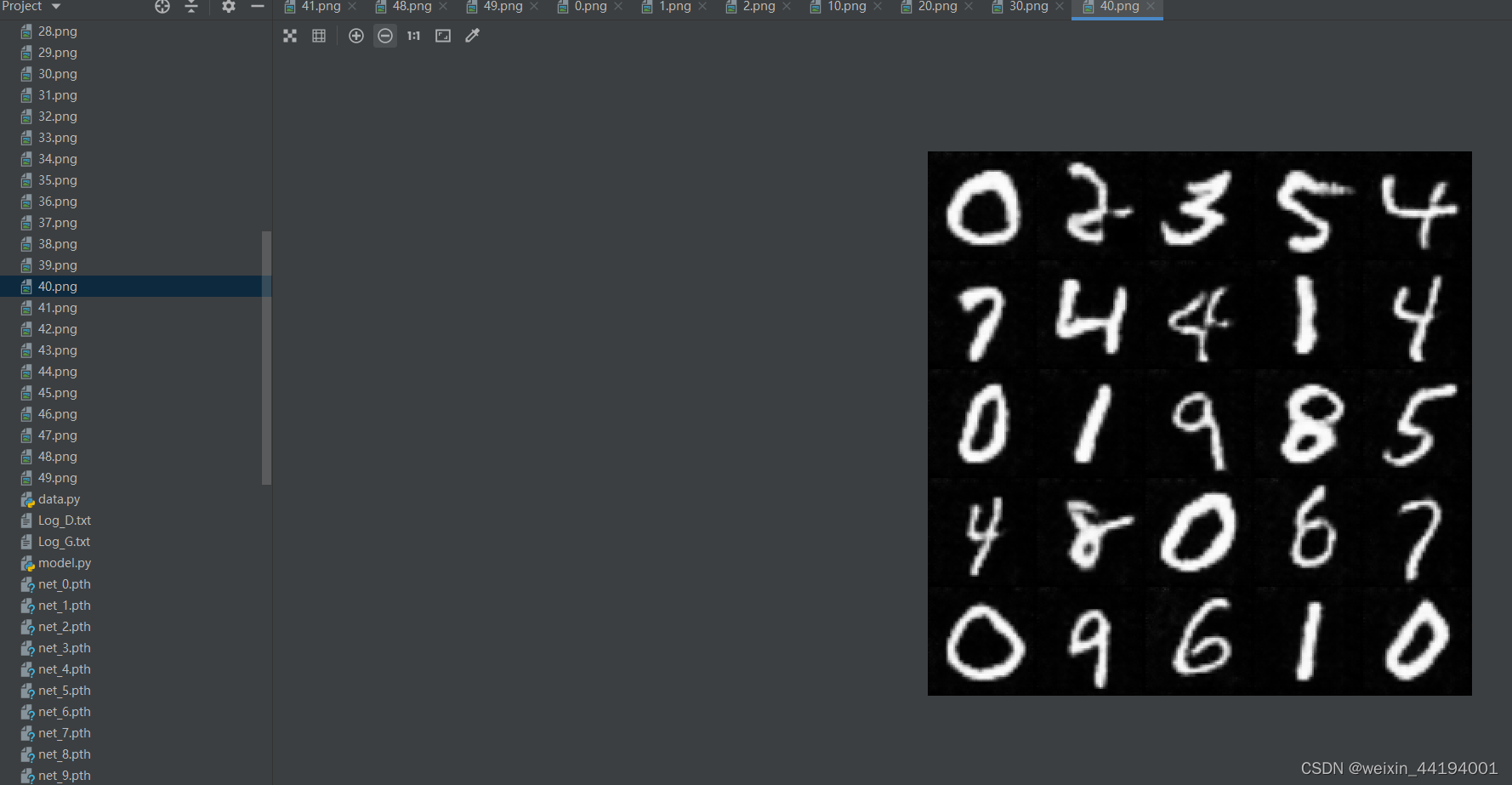
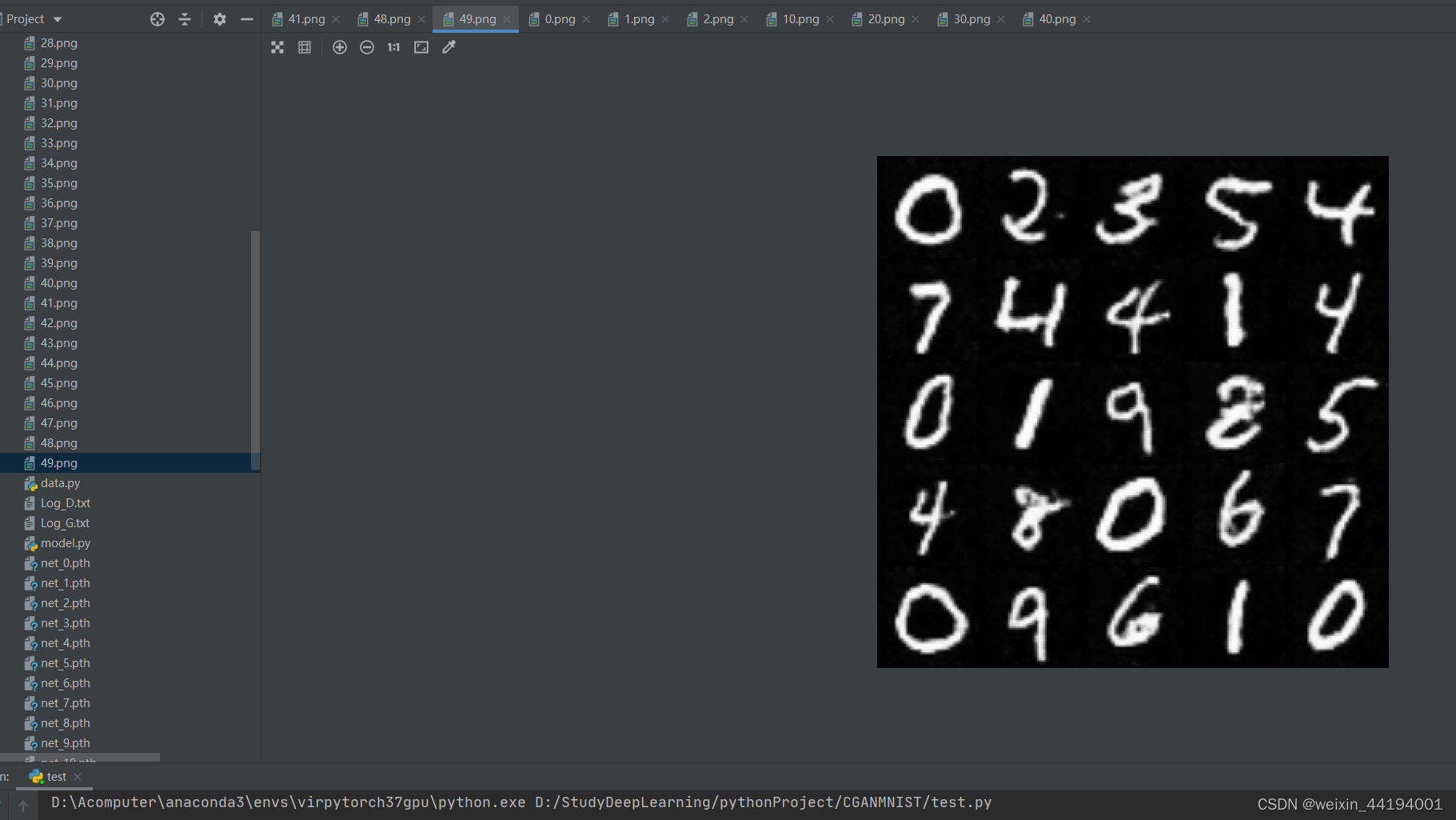
for epoch in range(EPOCH):print("正在保存网络并评估...")save_network(MODEL_G_PATH, netG, epoch)with torch.no_grad():fake_imgs = netG(fix_noise, fix_input_c).detach().cpu()images = recover_image(fake_imgs)full_image = np.full((5 * 64, 5 * 64, 3), 0, dtype="uint8")for i in range(25):row = i // 5col = i % 5full_image[row * 64:(row + 1) * 64, col * 64:(col + 1) * 64, :] = images[i]plt.imshow(full_image)#plt.show()plt.imsave("{}.png".format(epoch), full_image)for data in data_loader:##################################################判别器交叉熵越小越好# 1. 更新判别器D: 最大化 log(D(x)) + log(1 - D(G(z)))# 等同于最小化 - log(D(x)) - log(1 - D(G(z)))#################################################netD.zero_grad()real_imgs, input_c = data #这里的input_c其实就是数据集每一批中的每个图片对应的标签input_c = input_c.to(device)input_c = onehot(input_c, NUM_CLASS).to(device)# 1.1 来自数据集的样本#这里这一步就是想训练判别器,能够识别出是否真实图片,以及图片与对应的标签是否对应real_imgs = real_imgs.to(device)b_size = real_imgs.size(0)label = torch.full((b_size,), real_label, dtype=torch.float, device=device)#上面的torch.full是生成一维的 b_size这么多的,填充值为1.的张量# real_label = 1.# fake_label = 0.# 使用鉴别器对数据集样本做判断output = netD(real_imgs, input_c).view(-1) #view() 方法被用来将模型输出的张量进行扁平化操作,即将张量中的所有元素都展开成一个一维向量# 计算交叉熵损失 -log(D(x))errD_real = criterion(output, label)# 对判别器进行梯度回传errD_real.backward()D_x = output.mean().item() #对同一批预测结果的交叉熵取平均值## 1.2 生成随机向量 这一步想要训练判别器是否能够识别出是虚假图片noise = torch.randn(b_size, NZ, device=device)# 生成随机标签input_c = (torch.rand(b_size, 1) * NUM_CLASS).type(torch.LongTensor).squeeze().to(device)input_c = onehot(input_c, NUM_CLASS)#fix_noise = torch.randn(BATCH_SIZE, NZ, device=device)#fix_input_c = (torch.rand(BATCH_SIZE, 1) * NUM_CLASS).type(torch.LongTensor).squeeze().to(device)#fix_input_c = onehot(fix_input_c, NUM_CLASS)# 来自生成器生成的样本fake = netG(noise, input_c)label.fill_(fake_label)# real_label = 1.# fake_label = 0.# 使用鉴别器对生成器生成样本做判断output = netD(fake.detach(), input_c).view(-1) #view() 方法被用来将模型输出的张量进行扁平化操作,即将张量中的所有元素都展开成一个一维向量# 计算交叉熵损失 -log(1 - D(G(z)))errD_fake = criterion(output, label)# 对判别器进行梯度回传errD_fake.backward()D_G_z1 = output.mean().item()# 对判别器计算总梯度,-log(D(x))-log(1 - D(G(z)))errD = errD_real + errD_fake# 更新判别器optimizerD.step()################################################## 2. 更新生成器G: 最小化 log(D(x)) + log(1 - D(G(z))),# 等同于最小化log(1 - D(G(z))),即最小化-log(D(G(z)))# 也就等同于最小化-(log(D(G(z)))*1+log(1-D(G(z)))*0)# 令生成器样本标签值为1,上式就满足了交叉熵的定义#################################################netG.zero_grad()# 对于生成器训练,令生成器生成的样本为真,label.fill_(real_label)# real_label = 1.# fake_label = 0.output = netD(fake, input_c).view(-1)# 对生成器计算损失errG = criterion(output, label)# 因为这里判别器的角度label真实应该是0,但是站在生成器的角度,label真实应该是1,即生成器希望生成的虚假图片让判别器识别的时候,会误以为1才比较好,即误以为是真实的图片# 所以生成器交叉熵也是越小越好# 对生成器进行梯度回传errG.backward()D_G_z2 = output.mean().item()# 更新生成器optimizerG.step()# 输出损失状态if iters % 5 == 0:print('[%d/%d][%d/%d]\tLoss_D: %.4f\tLoss_G: %.4f\tD(x): %.4f\tD(G(z)): %.4f / %.4f'% (epoch, EPOCH, iters % len(data_loader), len(data_loader),errD.item(), errG.item(), D_x, D_G_z1, D_G_z2))d_writer.add(loss=errD.item(), i=iters)g_writer.add(loss=errG.item(), i=iters)# 保存损失记录G_losses.append(errG.item())D_losses.append(errD.item())iters += 15.关于交叉熵
熵代表确定性,熵越小越好,说明确定性越好
在这里,因为参照的是真实标签,它的熵是0
而交叉熵-熵=相对熵
故相对熵在预测情况相对真实情况的时候,相对熵=交叉熵,相对熵越小,说明预测情况越接近真实情况;
同理,交叉熵越小,说明预测情况越接近真实情况。
在二分类0,1任务中,经过卷积、正则化、激活函数ReLU等操作之后,假如生成了一个(B,1,1,1)的张量,每个值在(无穷小,无穷大)之间,经过sigmoid函数,会变成一个(B,1,1,1)的张量,数值h在(0,1)之间,如果这个h>0.5说明模型预测的是1,如果h<0.5说明模型预测的是0,但是这是模型预测的标签值y*,而还有个真实标签值y。假如现在h=0.6,那么说明模型预测的标签y*是1,真实标签却是0,
交叉熵= -y(lgh) -(1-y)(lg(1-h))
即当y=1时,交叉熵是-lgh 这个情况下,h越大越好
当y=0时,交叉熵是-(lg(1-h)) 这个情况下,h越小越好
6.训练过程运行结果
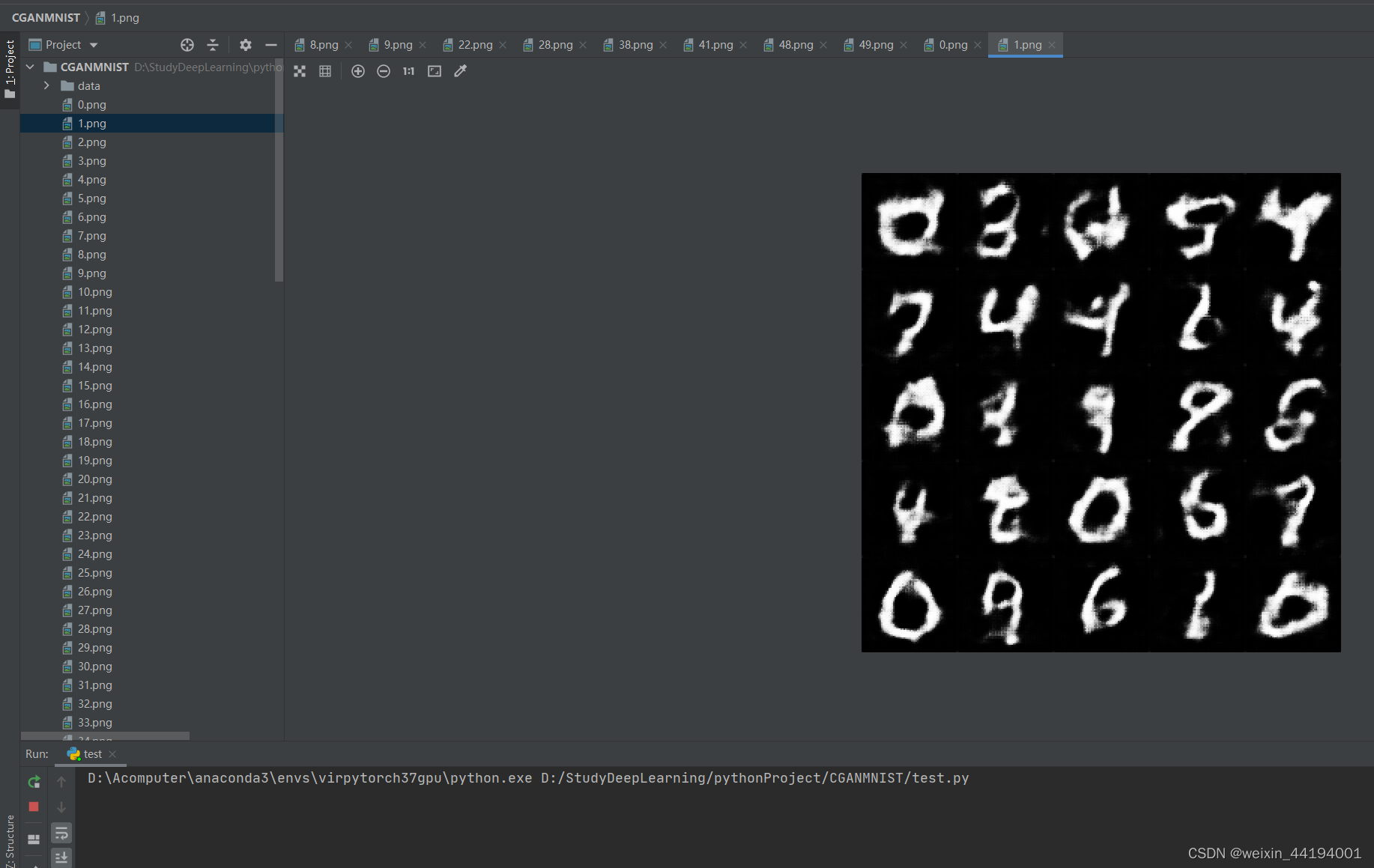
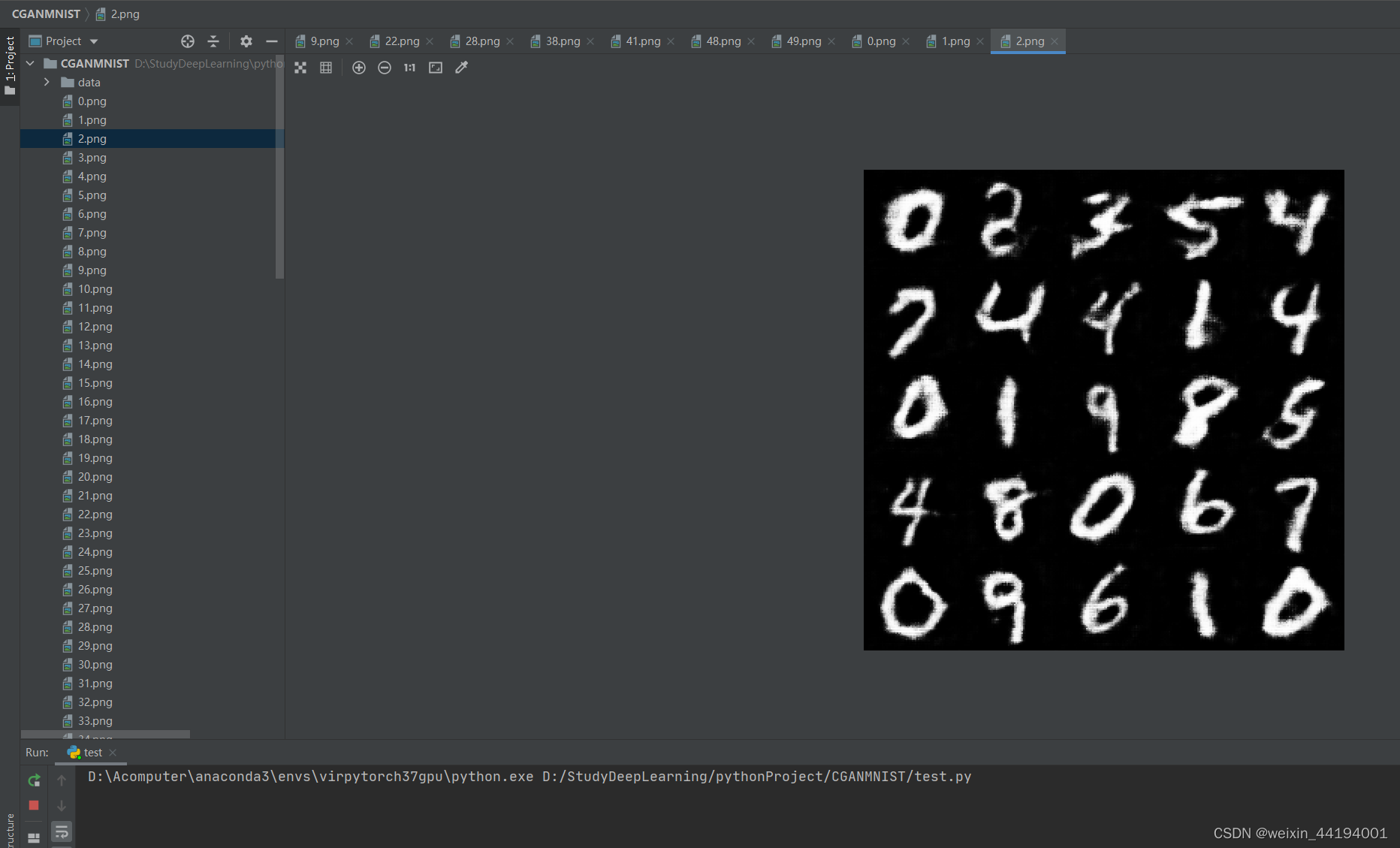
7.测试结果
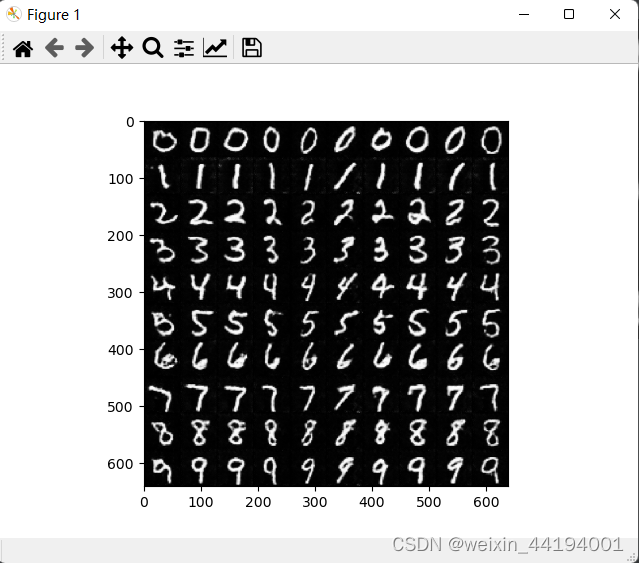
测试代码
NZ = 100
NUM_CLASS = 10
BATCH_SIZE = 10
DEVICE = "cpu"# fix_input_c = (torch.rand(BATCH_SIZE, 1) * NUM_CLASS).type(torch.LongTensor).squeeze().to(DEVICE)netG = Generator()
netG = restore_network("./", "49", netG)
fix_noise = torch.randn(BATCH_SIZE, NZ, device=DEVICE)
fix_input_c = torch.tensor([0, 0, 0, 0, 0, 0, 0, 0, 0, 0])
device = "cuda" if torch.cuda.is_available() else "cpu"
fix_input_c = onehot(fix_input_c, NUM_CLASS)
fix_input_c = fix_input_c.to(device)
fix_noise = fix_noise.to(device)
netG = netG.to(device)
#fake_imgs = netG(fix_noise, fix_input_c).detach().cpu()# images = recover_image(fake_imgs)
# full_image = np.full((1 * 64, 10 * 64, 3), 0, dtype="uint8")
# for i in range(10):
# row = i // 10
# col = i % 10
# full_image[row * 64:(row + 1) * 64, col * 64:(col + 1) * 64, :] = images[i]#fix_noise = torch.randn(BATCH_SIZE, NZ, device=DEVICE)
full_image = np.full((10 * 64, 10 * 64, 3), 0, dtype="uint8")
for num in range(10):input_c = torch.tensor(np.ones(10, dtype="int64") * num)input_c = onehot(input_c, NUM_CLASS)fix_noise = fix_noise.to(device)input_c = input_c.to(device)fake_imgs = netG(fix_noise, input_c).detach().cpu()images = recover_image(fake_imgs)for i in range(10):row = numcol = i % 10full_image[row * 64:(row + 1) * 64, col * 64:(col + 1) * 64, :] = images[i]plt.imshow(full_image)
plt.show()
plt.imsave("hah.png", full_image)这篇关于CGAN原理讲解与源码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





