本文主要是介绍stm32通过I2C实现AHT20温湿度采集,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 使用工具
- 一、I2C总线协议
- 1.1 什么是I2C协议
- 1.2 I2C 协议的物理层和协议层
- 1.3 I2C 基本读写过程
- 1.4 软件IIC和硬件IIC
- 二、通过I2C实现AHT20温湿度采集
- 2.1 AHT20芯片相关信息的了解
- 2.2 硬件连接
- 2.3 添加代码
- 2.4 实验结果展示
- 三、总结
- 四、参考资料
使用工具
软件:Keil 5.31
mcuisp
野火串口调试助手
硬件:STM32F103C8T6核心板
AHT20温湿度采集器
一、I2C总线协议
1.1 什么是I2C协议
I2C 通讯协议(Inter-Integrated Circuit)是由 Phiilps 公司开发的,由于它引脚少,硬件实现简单,可扩展性强,不需要 USART、CAN 等通讯协议的外部收发设备现在被广泛地使用在系统内多个集成电路(IC)间的通讯。
1.2 I2C 协议的物理层和协议层
在计算机科学里,大部分复杂的问题都可以通过分层来简化。如芯片被分为内核层和片上外设,STM32 标准库则是在寄存器与用户代码之间的软件层。
对于通讯协议,我们也以分层的方式来理解,最基本的是把它分为物理层和协议层。
简单来说物理层规定我们用嘴巴还是用肢体来交流,协议层则规定我们用中文还是英文来交流。
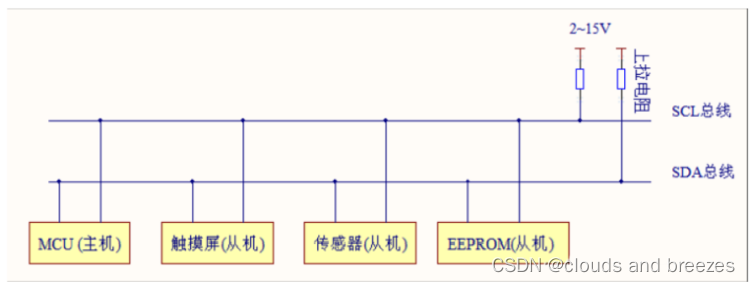
- 物理层
物理层规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输。
I2C 通讯设备之间的常用连接方式如图所示:
- 协议层
I2C 的协议定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地址广播等环节,主要规定通讯逻辑,统一收发双方的数据打包、解包标准。
1.3 I2C 基本读写过程
- 写数据
若配置的方向传输位为“写数据”方向,即下图的情况,广播完地址,接收到应答信号后,主机开始正式向从机传输数据(DATA),数据包的大小为 8 位,主机每发送完一个字节数据,都要等待从机的应答信号(ACK),重复这个过程,可以向从机传输 N 个数据,这个 N 没有大小限制。当数据传输结束时,主机向从机发送一个停止传输信号§,表示不再传输数据。

- 读数据
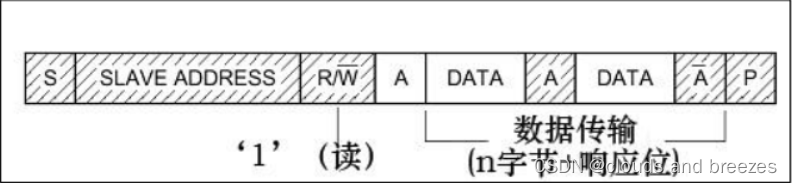
若配置的方向传输位为“读数据”方向,即上图的情况,广播完地址,接收到应答信号后,从机开始向主机返回数据(DATA),数据包大小也为 8 位,从机每发送完一个数据,都会等待主机的应答信号(ACK),重复这个过程,可以返回 N 个数据,这个 N 也没有大小限制。当主机希望停止接收数据时,就向从机返回一个非应答信号(NACK),则从机自动停止数据传输。
1.4 软件IIC和硬件IIC
IIC分为软件IIC和硬件IIC
软件IIC: 软件IIC通信指的是用单片机的两个I/O端口模拟出来的IIC,用软件控制管脚状态以模拟I2C通信波形,软件模拟寄存器的工作方式。
直接使用 CPU 内核按照 I2C 协议的要求控制 GPIO 输出高低电平,从而模拟I2C。
使用: 需要在控制产生 I2C 的起始信号时,控制作为SCL 线的 GPIO 引脚输出高电平,然后控制作为 SDA 线的 GPIO 引脚在此期间完成由高电平至低电平的切换,最后再控制SCL线切换为低电平,这样就输出了一个标准的 I2C 起始信号。
硬件IIC:一块硬件电路,硬件I2C对应芯片上的I2C外设,有相应I2C驱动电路,其所使用的I2C管脚也是专用的,硬件(固件)I2C是直接调用内部寄存器进行配置。
直接利用 STM32 芯片中的硬件 I2C 外设。
使用: 只要配置好对应的寄存器,外设就会产生标准串口协议的时序。在初始化好 I2C 外设后,只需要把某寄存器位置 1,此时外设就会控制对应的 SCL 及 SDA 线自动产生 I2C 起始信号,不需要内核直接控制引脚的电平。
二、通过I2C实现AHT20温湿度采集
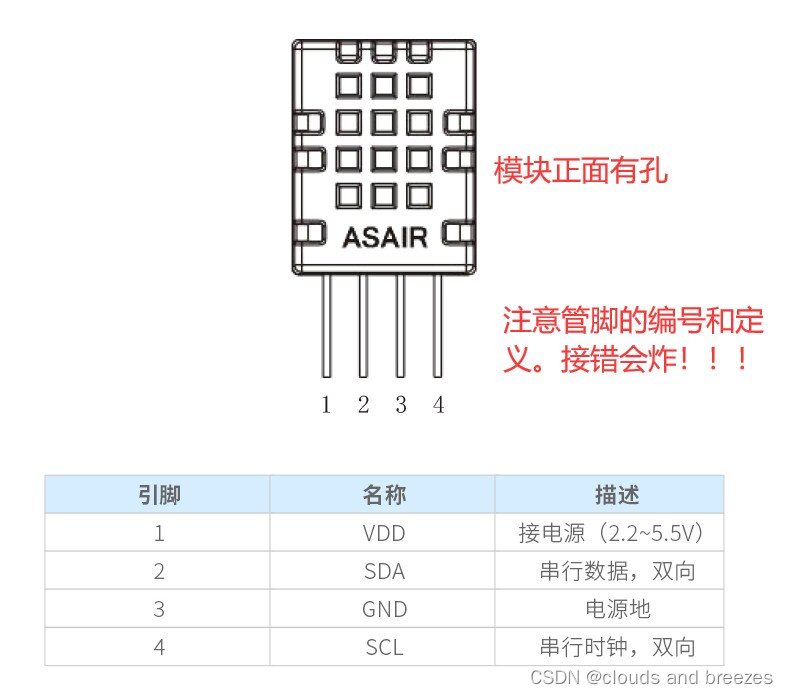
2.1 AHT20芯片相关信息的了解
具体信息请到官方下载对应产品介绍文档,资料链接如下:http://www.aosong.com/class-36.html
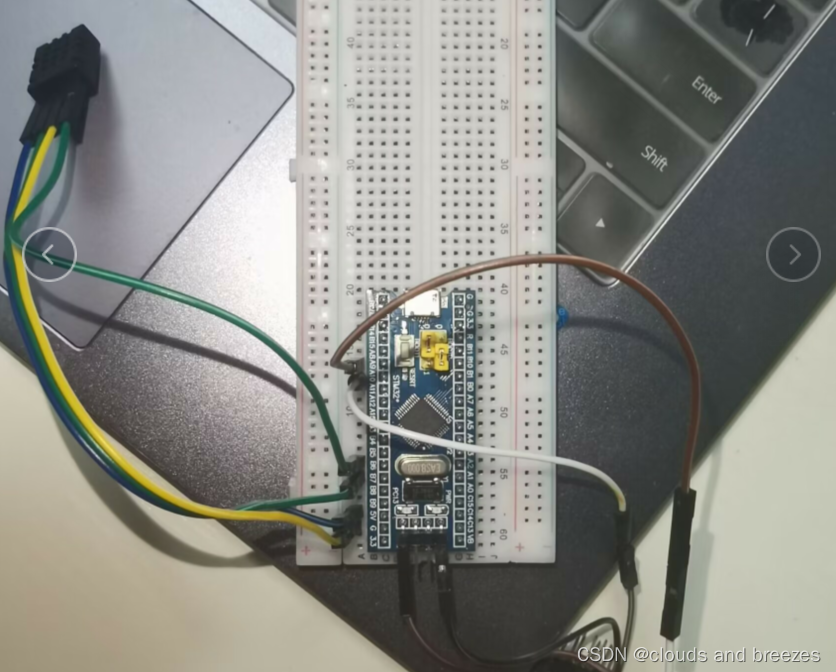
2.2 硬件连接
2.3 添加代码
1.main.c
#include "delay.h"
#include "usart.h"
#include "bsp_i2c.h"int main(void)
{ delay_init(); //ÑÓʱº¯Êý³õʼ»¯ uart_init(115200); //´®¿Ú³õʼ»¯Îª115200IIC_Init();while(1){printf("¿ªÊ¼²âÁ¿£¬ÇëÉԵȣº");read_AHT20_once();delay_ms(1500);}
}
2.usart.c
#include "sys.h"
#include "usart.h"//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********///
//Èç¹ûʹÓÃucos,Ôò°üÀ¨ÏÂÃæµÄÍ·Îļþ¼´¿É.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ʹÓÃ
#endif
//
//STM32¿ª·¢°å
//´®¿Ú1³õʼ»¯ // //
//¼ÓÈëÒÔÏ´úÂë,Ö§³Öprintfº¯Êý,¶ø²»ÐèҪѡÔñuse MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//±ê×¼¿âÐèÒªµÄÖ§³Öº¯Êý
struct __FILE
{ int handle; }; FILE __stdout;
//¶¨Òå_sys_exit()ÒÔ±ÜÃâʹÓðëÖ÷»úģʽ
void _sys_exit(int x)
{ x = x;
}
//Öض¨Òåfputcº¯Êý
int fputc(int ch, FILE *f)
{ while((USART1->SR&0X40)==0);//Ñ»··¢ËÍ,Ö±µ½·¢ËÍÍê±Ï USART1->DR = (u8) ch; return ch;
}
#endif /*ʹÓÃmicroLibµÄ·½·¨*//*
int fputc(int ch, FILE *f)
{USART_SendData(USART1, (uint8_t) ch);while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {} return ch;
}
int GetKey (void) { while (!(USART1->SR & USART_FLAG_RXNE));return ((int)(USART1->DR & 0x1FF));
}
*/#if EN_USART1_RX //Èç¹ûʹÄÜÁ˽ÓÊÕ
//´®¿Ú1ÖжϷþÎñ³ÌÐò
//×¢Òâ,¶ÁÈ¡USARTx->SRÄܱÜÃâĪÃûÆäÃîµÄ´íÎó
u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.
//½ÓÊÕ״̬
//bit15£¬ ½ÓÊÕÍê³É±êÖ¾
//bit14£¬ ½ÓÊÕµ½0x0d
//bit13~0£¬ ½ÓÊÕµ½µÄÓÐЧ×Ö½ÚÊýÄ¿
u16 USART_RX_STA=0; //½ÓÊÕ״̬±ê¼Ç void uart_init(u32 bound){//GPIO¶Ë¿ÚÉèÖÃGPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //ʹÄÜUSART1£¬GPIOAʱÖÓ//USART1_TX PA.9GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³öGPIO_Init(GPIOA, &GPIO_InitStructure);//USART1_RX PA.10GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈëGPIO_Init(GPIOA, &GPIO_InitStructure); //Usart1 NVIC ÅäÖÃNVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//ÇÀÕ¼ÓÅÏȼ¶3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //×ÓÓÅÏȼ¶3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨµÀʹÄÜNVIC_Init(&NVIC_InitStructure); //¸ù¾ÝÖ¸¶¨µÄ²ÎÊý³õʼ»¯VIC¼Ä´æÆ÷//USART ³õʼ»¯ÉèÖÃUSART_InitStructure.USART_BaudRate = bound;//Ò»°ãÉèÖÃΪ9600;USART_InitStructure.USART_WordLength = USART_WordLength_8b;//×Ö³¤Îª8λÊý¾Ý¸ñʽUSART_InitStructure.USART_StopBits = USART_StopBits_1;//Ò»¸öֹͣλUSART_InitStructure.USART_Parity = USART_Parity_No;//ÎÞÆæżУÑéλUSART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//ÎÞÓ²¼þÊý¾ÝÁ÷¿ØÖÆUSART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //ÊÕ·¢Ä£Ê½USART_Init(USART1, &USART_InitStructure); //³õʼ»¯´®¿ÚUSART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//¿ªÆôÖжÏUSART_Cmd(USART1, ENABLE); //ʹÄÜ´®¿Ú }void USART1_IRQHandler(void) //´®¿Ú1ÖжϷþÎñ³ÌÐò{u8 Res;
#ifdef OS_TICKS_PER_SEC //Èç¹ûʱÖÓ½ÚÅÄÊý¶¨ÒåÁË,˵Ã÷ҪʹÓÃucosIIÁË.OSIntEnter();
#endifif(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //½ÓÊÕÖжÏ(½ÓÊÕµ½µÄÊý¾Ý±ØÐëÊÇ0x0d 0x0a½áβ){Res =USART_ReceiveData(USART1);//(USART1->DR); //¶ÁÈ¡½ÓÊÕµ½µÄÊý¾Ýif((USART_RX_STA&0x8000)==0)//½ÓÊÕδÍê³É{if(USART_RX_STA&0x4000)//½ÓÊÕµ½ÁË0x0d{if(Res!=0x0a)USART_RX_STA=0;//½ÓÊÕ´íÎó,ÖØпªÊ¼else USART_RX_STA|=0x8000; //½ÓÊÕÍê³ÉÁË }else //»¹Ã»ÊÕµ½0X0D{ if(Res==0x0d)USART_RX_STA|=0x4000;else{USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;USART_RX_STA++;if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//½ÓÊÕÊý¾Ý´íÎó,ÖØпªÊ¼½ÓÊÕ } }} }
#ifdef OS_TICKS_PER_SEC //Èç¹ûʱÖÓ½ÚÅÄÊý¶¨ÒåÁË,˵Ã÷ҪʹÓÃucosIIÁË.OSIntExit();
#endif
}
#endif
3.usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h" //STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********///
//STM32¿ª·¢°å
//´®¿Ú1³õʼ»¯ #define USART_REC_LEN 200 //¶¨Òå×î´ó½ÓÊÕ×Ö½ÚÊý 200
#define EN_USART1_RX 1 //ʹÄÜ£¨1£©/½ûÖ¹£¨0£©´®¿Ú1½ÓÊÕextern u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.Ä©×Ö½ÚΪ»»Ðзû
extern u16 USART_RX_STA; //½ÓÊÕ״̬±ê¼Ç
//Èç¹ûÏë´®¿ÚÖжϽÓÊÕ£¬Ç벻ҪעÊÍÒÔϺ궨Òå
void uart_init(u32 bound);
#endif
4.bsp_i2c.c
#include "bsp_i2c.h"
#include "delay.h"uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t AHT20_status=0;uint32_t H1=0; //Humility
uint32_t T1=0; //Temperatureuint8_t AHT20_OutData[4];
uint8_t AHT20sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};void IIC_Init(void)
{ GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE ); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //ÍÆÍìÊä³öGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);IIC_SCL=1;IIC_SDA=1;}
//²úÉúIICÆðʼÐźÅ
void IIC_Start(void)
{SDA_OUT(); //sdaÏßÊä³öIIC_SDA=1; IIC_SCL=1;delay_us(4);IIC_SDA=0;//START:when CLK is high,DATA change form high to low delay_us(4);IIC_SCL=0;//ǯסI2C×ÜÏߣ¬×¼±¸·¢ËÍ»ò½ÓÊÕÊý¾Ý
}
//²úÉúIICÍ£Ö¹ÐźÅ
void IIC_Stop(void)
{SDA_OUT();//sdaÏßÊä³öIIC_SCL=0;IIC_SDA=0;//STOP:when CLK is high DATA change form low to highdelay_us(4);IIC_SCL=1; IIC_SDA=1;//·¢ËÍI2C×ÜÏß½áÊøÐźÅdelay_us(4);
}
//µÈ´ýÓ¦´ðÐźŵ½À´
//·µ»ØÖµ£º1£¬½ÓÊÕÓ¦´ðʧ°Ü
// 0£¬½ÓÊÕÓ¦´ð³É¹¦
u8 IIC_Wait_Ack(void)
{u8 ucErrTime=0;SDA_IN(); //SDAÉèÖÃΪÊäÈë IIC_SDA=1;delay_us(1); IIC_SCL=1;delay_us(1); while(READ_SDA){ucErrTime++;if(ucErrTime>250){IIC_Stop();return 1;}}IIC_SCL=0;//ʱÖÓÊä³ö0 return 0;
}
//²úÉúACKÓ¦´ð
void IIC_Ack(void)
{IIC_SCL=0;SDA_OUT();IIC_SDA=0;delay_us(2);IIC_SCL=1;delay_us(2);IIC_SCL=0;
}
//²»²úÉúACKÓ¦´ð
void IIC_NAck(void)
{IIC_SCL=0;SDA_OUT();IIC_SDA=1;delay_us(2);IIC_SCL=1;delay_us(2);IIC_SCL=0;
}
//IIC·¢ËÍÒ»¸ö×Ö½Ú
//·µ»Ø´Ó»úÓÐÎÞÓ¦´ð
//1£¬ÓÐÓ¦´ð
//0£¬ÎÞÓ¦´ð
void IIC_Send_Byte(u8 txd)
{ u8 t; SDA_OUT(); IIC_SCL=0;//ÀµÍʱÖÓ¿ªÊ¼Êý¾Ý´«Êäfor(t=0;t<8;t++){ IIC_SDA=(txd&0x80)>>7;txd<<=1; delay_us(2); //¶ÔTEA5767ÕâÈý¸öÑÓʱ¶¼ÊDZØÐëµÄIIC_SCL=1;delay_us(2); IIC_SCL=0; delay_us(2);}
}
//¶Á1¸ö×Ö½Ú£¬ack=1ʱ£¬·¢ËÍACK£¬ack=0£¬·¢ËÍnACK
u8 IIC_Read_Byte(unsigned char ack)
{unsigned char i,receive=0;SDA_IN();//SDAÉèÖÃΪÊäÈëfor(i=0;i<8;i++ ){IIC_SCL=0; delay_us(2);IIC_SCL=1;receive<<=1;if(READ_SDA)receive++; delay_us(1); } if (!ack)IIC_NAck();//·¢ËÍnACKelseIIC_Ack(); //·¢ËÍACK return receive;
}void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr)
{IIC_Start(); if(device_addr==0xA0) //eepromµØÖ·´óÓÚ1×Ö½ÚIIC_Send_Byte(0xA0 + ((addr/256)<<1));//·¢Ë͸ߵØÖ·elseIIC_Send_Byte(device_addr); //·¢Æ÷¼þµØÖ·IIC_Wait_Ack(); IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·IIC_Wait_Ack(); IIC_Send_Byte(data); //·¢ËÍ×Ö½Ú IIC_Wait_Ack(); IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ if(device_addr==0xA0) //delay_ms(10);elsedelay_us(2);
}uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead) //¶Á¼Ä´æÆ÷»ò¶ÁÊý¾Ý
{ uint16_t data;IIC_Start(); if(device_addr==0xA0)IIC_Send_Byte(0xA0 + ((addr/256)<<1));elseIIC_Send_Byte(device_addr); IIC_Wait_Ack();IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·IIC_Wait_Ack(); IIC_Start(); IIC_Send_Byte(device_addr+1); //·¢Æ÷¼þµØÖ·IIC_Wait_Ack();if(ByteNumToRead == 1)//LM75ζÈÊý¾ÝΪ11bit{data=IIC_Read_Byte(0);}else{data=IIC_Read_Byte(1);data=(data<<8)+IIC_Read_Byte(0);}IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ return data;
}/**********
*ÉÏÃ沿·ÖΪIO¿ÚÄ£¿éI2CÅäÖÃ
*
*´ÓÕâÒÔÏ¿ªÊ¼ÎªAHT20µÄÅäÖÃI2C
*º¯ÊýÃûÓÐIICºÍI2CµÄÇø±ð£¬Çë×¢Ò⣡£¡£¡£¡£¡
*
*2020/2/23×îºóÐÞ¸ÄÈÕÆÚ
*
***********/
void read_AHT20_once(void)
{delay_ms(10);reset_AHT20();delay_ms(10);init_AHT20();delay_ms(10);startMeasure_AHT20();delay_ms(80);read_AHT20();delay_ms(5);
}void reset_AHT20(void)
{I2C_Start();I2C_WriteByte(0x70);ack_status = Receive_ACK();if(ack_status) printf("1");else printf("1-n-");I2C_WriteByte(0xBA);ack_status = Receive_ACK();if(ack_status) printf("2");else printf("2-n-");I2C_Stop();/*AHT20_OutData[0] = 0;AHT20_OutData[1] = 0;AHT20_OutData[2] = 0;AHT20_OutData[3] = 0;*/
}void init_AHT20(void)
{I2C_Start();I2C_WriteByte(0x70);ack_status = Receive_ACK();if(ack_status) printf("3");else printf("3-n-"); I2C_WriteByte(0xE1);ack_status = Receive_ACK();if(ack_status) printf("4");else printf("4-n-");I2C_WriteByte(0x08);ack_status = Receive_ACK();if(ack_status) printf("5");else printf("5-n-");I2C_WriteByte(0x00);ack_status = Receive_ACK();if(ack_status) printf("6");else printf("6-n-");I2C_Stop();
}void startMeasure_AHT20(void)
{//------------I2C_Start();I2C_WriteByte(0x70);ack_status = Receive_ACK();if(ack_status) printf("7");else printf("7-n-");I2C_WriteByte(0xAC);ack_status = Receive_ACK();if(ack_status) printf("8");else printf("8-n-");I2C_WriteByte(0x33);ack_status = Receive_ACK();if(ack_status) printf("9");else printf("9-n-");I2C_WriteByte(0x00);ack_status = Receive_ACK();if(ack_status) printf("10");else printf("10-n-");I2C_Stop();
}void read_AHT20(void)
{uint8_t i;for(i=0; i<6; i++){readByte[i]=0;}//-------------I2C_Start();I2C_WriteByte(0x71);ack_status = Receive_ACK();readByte[0]= I2C_ReadByte();Send_ACK();readByte[1]= I2C_ReadByte();Send_ACK();readByte[2]= I2C_ReadByte();Send_ACK();readByte[3]= I2C_ReadByte();Send_ACK();readByte[4]= I2C_ReadByte();Send_ACK();readByte[5]= I2C_ReadByte();SendNot_Ack();//Send_ACK();I2C_Stop();//--------------if( (readByte[0] & 0x68) == 0x08 ){H1 = readByte[1];H1 = (H1<<8) | readByte[2];H1 = (H1<<8) | readByte[3];H1 = H1>>4;H1 = (H1*1000)/1024/1024;T1 = readByte[3];T1 = T1 & 0x0000000F;T1 = (T1<<8) | readByte[4];T1 = (T1<<8) | readByte[5];T1 = (T1*2000)/1024/1024 - 500;AHT20_OutData[0] = (H1>>8) & 0x000000FF;AHT20_OutData[1] = H1 & 0x000000FF;AHT20_OutData[2] = (T1>>8) & 0x000000FF;AHT20_OutData[3] = T1 & 0x000000FF;}else{AHT20_OutData[0] = 0xFF;AHT20_OutData[1] = 0xFF;AHT20_OutData[2] = 0xFF;AHT20_OutData[3] = 0xFF;printf("ʧ°ÜÁË");}printf("\r\n");printf("ζÈ:%d%d.%d",T1/100,(T1/10)%10,T1%10);printf("ʪ¶È:%d%d.%d",H1/100,(H1/10)%10,H1%10);printf("\r\n");
}uint8_t Receive_ACK(void)
{uint8_t result=0;uint8_t cnt=0;IIC_SCL = 0;SDA_IN(); delay_us(4);IIC_SCL = 1;delay_us(4);while(READ_SDA && (cnt<100)){cnt++;}IIC_SCL = 0;delay_us(4);if(cnt<100){result=1;}return result;
}void Send_ACK(void)
{SDA_OUT();IIC_SCL = 0;delay_us(4);IIC_SDA = 0;delay_us(4);IIC_SCL = 1;delay_us(4);IIC_SCL = 0;delay_us(4);SDA_IN();
}void SendNot_Ack(void)
{SDA_OUT();IIC_SCL = 0;delay_us(4);IIC_SDA = 1;delay_us(4);IIC_SCL = 1;delay_us(4);IIC_SCL = 0;delay_us(4);IIC_SDA = 0;delay_us(4);
}void I2C_WriteByte(uint8_t input)
{uint8_t i;SDA_OUT();for(i=0; i<8; i++){IIC_SCL = 0;delay_ms(5);if(input & 0x80){IIC_SDA = 1;//delaymm(10);}else{IIC_SDA = 0;//delaymm(10);}IIC_SCL = 1;delay_ms(5);input = (input<<1);}IIC_SCL = 0;delay_us(4);SDA_IN();delay_us(4);
} uint8_t I2C_ReadByte(void)
{uint8_t resultByte=0;uint8_t i=0, a=0;IIC_SCL = 0;SDA_IN();delay_ms(4);for(i=0; i<8; i++){IIC_SCL = 1;delay_ms(3);a=0;if(READ_SDA){a=1;}else{a=0;}//resultByte = resultByte | a;resultByte = (resultByte << 1) | a;IIC_SCL = 0;delay_ms(3);}SDA_IN();delay_ms(10);return resultByte;
}void set_AHT20sendOutData(void)
{/* --------------------------* 0xFA 0x06 0x0A temperature(2 Bytes) humility(2Bytes) short Address(2 Bytes)* And Check (1 byte)* -------------------------*/AHT20sendOutData[3] = AHT20_OutData[0];AHT20sendOutData[4] = AHT20_OutData[1];AHT20sendOutData[5] = AHT20_OutData[2];AHT20sendOutData[6] = AHT20_OutData[3];// AHT20sendOutData[7] = (drf1609.shortAddress >> 8) & 0x00FF;
// AHT20sendOutData[8] = drf1609.shortAddress & 0x00FF;// AHT20sendOutData[9] = getXY(AHT20sendOutData,10);
}void I2C_Start(void)
{SDA_OUT();IIC_SCL = 1;delay_ms(4);IIC_SDA = 1;delay_ms(4);IIC_SDA = 0;delay_ms(4);IIC_SCL = 0;delay_ms(4);
}void I2C_Stop(void)
{SDA_OUT();IIC_SDA = 0;delay_ms(4);IIC_SCL = 1;delay_ms(4);IIC_SDA = 1;delay_ms(4);
}
5.bsp_i2c.h
#ifndef __BSP_I2C_H
#define __BSP_I2C_H#include "sys.h"
#include "delay.h"
#include "usart.h"
//ʹÓÃIIC1 ¹ÒÔØM24C02,OLED,LM75AD,HT1382 PB6,PB7#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}//IO²Ù×÷º¯Êý
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //ÊäÈëSDA //IICËùÓвÙ×÷º¯Êý
void IIC_Init(void); //³õʼ»¯IICµÄIO¿Ú
void IIC_Start(void); //·¢ËÍIIC¿ªÊ¼ÐźÅ
void IIC_Stop(void); //·¢ËÍIICÍ£Ö¹ÐźÅ
void IIC_Send_Byte(u8 txd); //IIC·¢ËÍÒ»¸ö×Ö½Ú
u8 IIC_Read_Byte(unsigned char ack);//IIC¶ÁÈ¡Ò»¸ö×Ö½Ú
u8 IIC_Wait_Ack(void); //IICµÈ´ýACKÐźÅ
void IIC_Ack(void); //IIC·¢ËÍACKÐźÅ
void IIC_NAck(void); //IIC²»·¢ËÍACKÐźÅvoid IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr);
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead);//¼Ä´æÆ÷µØÖ·£¬Æ÷¼þµØÖ·£¬Òª¶ÁµÄ×Ö½ÚÊý void read_AHT20_once(void);
void reset_AHT20(void);
void init_AHT20(void);
void startMeasure_AHT20(void);
void read_AHT20(void);
uint8_t Receive_ACK(void);
void Send_ACK(void);
void SendNot_Ack(void);
void I2C_WriteByte(uint8_t input);
uint8_t I2C_ReadByte(void);
void set_AHT20sendOutData(void);
void I2C_Start(void);
void I2C_Stop(void);
#endifdelay.c
#include "delay.h"
#include "sys.h"//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********///
//Èç¹ûʹÓÃucos,Ôò°üÀ¨ÏÂÃæµÄÍ·Îļþ¼´¿É.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ʹÓÃ
#endif
// //STM32¿ª·¢°å
//ʹÓÃSysTickµÄÆÕͨ¼ÆÊýģʽ¶ÔÑÓ³Ù½øÐйÜÀí
//°üÀ¨delay_us,delay_ms//
static u8 fac_us=0;//usÑÓʱ±¶³ËÊý
static u16 fac_ms=0;//msÑÓʱ±¶³ËÊý
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
//systickÖжϷþÎñº¯Êý,ʹÓÃucosʱÓõ½
void SysTick_Handler(void)
{ OSIntEnter(); //½øÈëÖжÏOSTimeTick(); //µ÷ÓÃucosµÄʱÖÓ·þÎñ³ÌÐò OSIntExit(); //´¥·¢ÈÎÎñÇл»ÈíÖжÏ
}
#endif//³õʼ»¯ÑÓ³Ùº¯Êý
//µ±Ê¹ÓÃucosµÄʱºò,´Ëº¯Êý»á³õʼ»¯ucosµÄʱÖÓ½ÚÅÄ
//SYSTICKµÄʱÖӹ̶¨ÎªHCLKʱÖÓµÄ1/8
//SYSCLK:ϵͳʱÖÓ
void delay_init()
{#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.u32 reload;
#endifSysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //Ñ¡ÔñÍⲿʱÖÓ HCLK/8fac_us=SystemCoreClock/8000000; //ΪϵͳʱÖÓµÄ1/8 #ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.reload=SystemCoreClock/8000000; //ÿÃëÖӵļÆÊý´ÎÊý µ¥Î»ÎªK reload*=1000000/OS_TICKS_PER_SEC;//¸ù¾ÝOS_TICKS_PER_SECÉ趨Òç³öʱ¼ä//reloadΪ24λ¼Ä´æÆ÷,×î´óÖµ:16777216,ÔÚ72MÏÂ,Ô¼ºÏ1.86s×óÓÒ fac_ms=1000/OS_TICKS_PER_SEC;//´ú±íucos¿ÉÒÔÑÓʱµÄ×îÉÙµ¥Î» SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //¿ªÆôSYSTICKÖжÏSysTick->LOAD=reload; //ÿ1/OS_TICKS_PER_SECÃëÖжÏÒ»´Î SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //¿ªÆôSYSTICK
#elsefac_ms=(u16)fac_us*1000;//·ÇucosÏÂ,´ú±íÿ¸ömsÐèÒªµÄsystickʱÖÓÊý
#endif
} #ifdef OS_CRITICAL_METHOD //ʹÓÃÁËucos
//ÑÓʱnus
//nusΪҪÑÓʱµÄusÊý.
void delay_us(u32 nus)
{ u32 ticks;u32 told,tnow,tcnt=0;u32 reload=SysTick->LOAD; //LOADµÄÖµ ticks=nus*fac_us; //ÐèÒªµÄ½ÚÅÄÊý tcnt=0;told=SysTick->VAL; //¸Õ½øÈëʱµÄ¼ÆÊýÆ÷Öµwhile(1){tnow=SysTick->VAL; if(tnow!=told){ if(tnow<told)tcnt+=told-tnow;//ÕâÀï×¢ÒâÒ»ÏÂSYSTICKÊÇÒ»¸öµÝ¼õµÄ¼ÆÊýÆ÷¾Í¿ÉÒÔÁË.else tcnt+=reload-tnow+told; told=tnow;if(tcnt>=ticks)break;//ʱ¼ä³¬¹ý/µÈÓÚÒªÑÓ³ÙµÄʱ¼ä,ÔòÍ˳ö.} };
}
//ÑÓʱnms
//nms:ÒªÑÓʱµÄmsÊý
void delay_ms(u16 nms)
{ if(OSRunning==TRUE)//Èç¹ûosÒѾÔÚÅÜÁË { if(nms>=fac_ms)//ÑÓʱµÄʱ¼ä´óÓÚucosµÄ×îÉÙʱ¼äÖÜÆÚ {OSTimeDly(nms/fac_ms);//ucosÑÓʱ}nms%=fac_ms; //ucosÒѾÎÞ·¨ÌṩÕâôСµÄÑÓʱÁË,²ÉÓÃÆÕͨ·½Ê½ÑÓʱ }delay_us((u32)(nms*1000)); //ÆÕͨ·½Ê½ÑÓʱ,´ËʱucosÎÞ·¨Æô¶¯µ÷¶È.
}
#else//²»ÓÃucosʱ
//ÑÓʱnus
//nusΪҪÑÓʱµÄusÊý.
void delay_us(u32 nus)
{ u32 temp; SysTick->LOAD=nus*fac_us; //ʱ¼ä¼ÓÔØ SysTick->VAL=0x00; //Çå¿Õ¼ÆÊýÆ÷SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //¿ªÊ¼µ¹Êý do{temp=SysTick->CTRL;}while(temp&0x01&&!(temp&(1<<16)));//µÈ´ýʱ¼äµ½´ï SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //¹Ø±Õ¼ÆÊýÆ÷SysTick->VAL =0X00; //Çå¿Õ¼ÆÊýÆ÷
}
//ÑÓʱnms
//×¢ÒânmsµÄ·¶Î§
//SysTick->LOADΪ24λ¼Ä´æÆ÷,ËùÒÔ,×î´óÑÓʱΪ:
//nms<=0xffffff*8*1000/SYSCLK
//SYSCLKµ¥Î»ÎªHz,nmsµ¥Î»Îªms
//¶Ô72MÌõ¼þÏÂ,nms<=1864
void delay_ms(u16 nms)
{ u32 temp; SysTick->LOAD=(u32)nms*fac_ms;//ʱ¼ä¼ÓÔØ(SysTick->LOADΪ24bit)SysTick->VAL =0x00; //Çå¿Õ¼ÆÊýÆ÷SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //¿ªÊ¼µ¹Êý do{temp=SysTick->CTRL;}while(temp&0x01&&!(temp&(1<<16)));//µÈ´ýʱ¼äµ½´ï SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //¹Ø±Õ¼ÆÊýÆ÷SysTick->VAL =0X00; //Çå¿Õ¼ÆÊýÆ÷
}
#endifsys.c
#include "sys.h"//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/// //STM32¿ª·¢°å
//ϵͳÖжϷÖ×éÉèÖû¯ //********************************************************************************
void NVIC_Configuration(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //ÉèÖÃNVICÖжϷÖ×é2:2λÇÀÕ¼ÓÅÏȼ¶£¬2λÏìÓ¦ÓÅÏȼ¶}将上式代码添加到工程文件
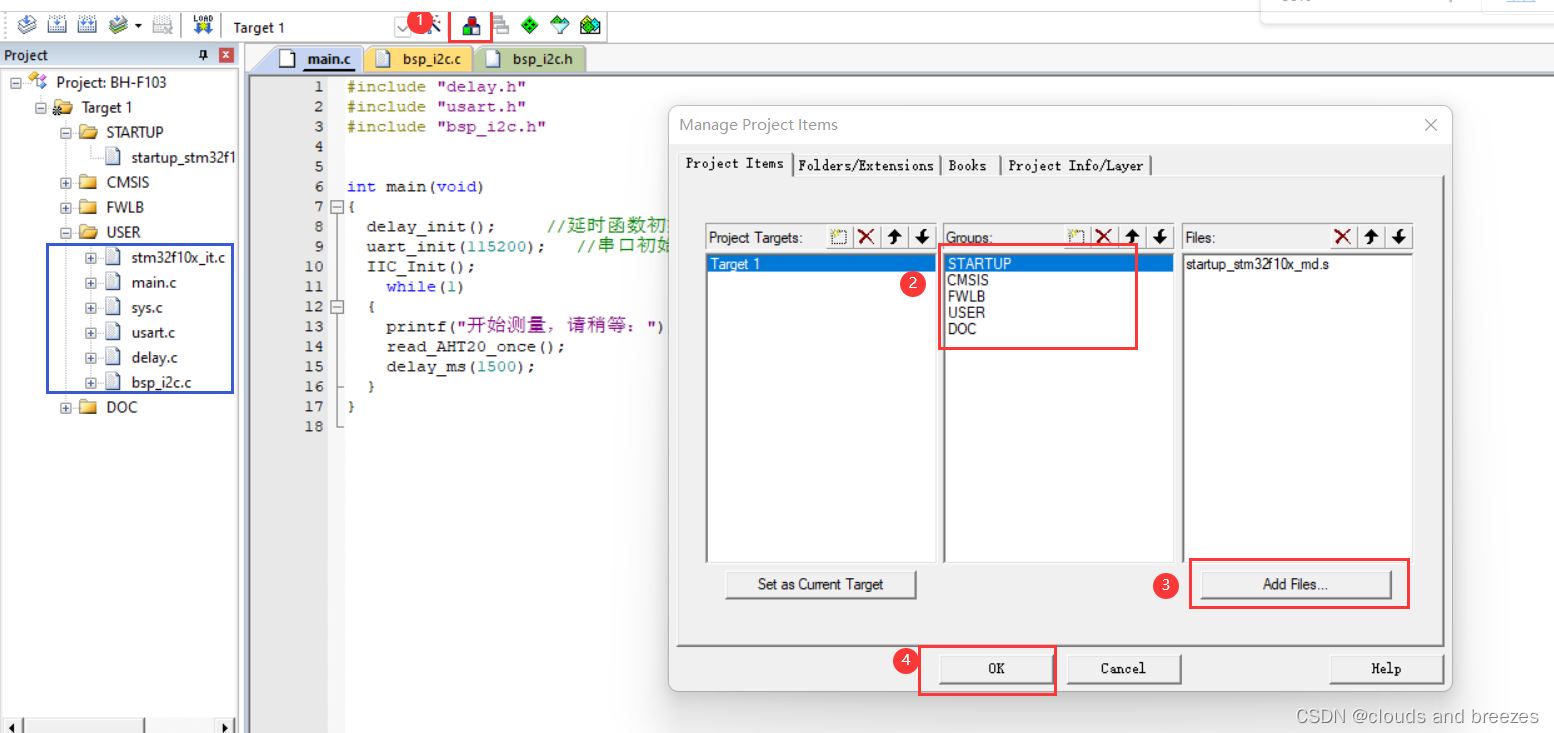
2.4 实验结果展示
三、总结
通过本次实验,了解了I2C总线协议的具体内容、了解了硬件I2C和模拟I2C的主要区别,同时也学习了传感器的使用,受益匪浅。
四、参考资料
https://blog.csdn.net/qq_43279579/article/details/111597278
https://blog.csdn.net/hhhhhh277523/article/details/111397514
https://blog.csdn.net/qq_54496810/article/details/121426752
https://blog.csdn.net/qq_46467126/article/details/121436790
这篇关于stm32通过I2C实现AHT20温湿度采集的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






