本文主要是介绍手把手系列--STM32 QSPI操作指南,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本主题相关内容
手把手系列--华邦W25Q64JV Flash操作指南_coder.mark的博客-CSDN博客_w25q64手册![]() https://blog.csdn.net/tianizimark/article/details/121712792手把手系列--华邦W25Q128JV Flash操作指南_coder.mark的博客-CSDN博客_w25q128jv
https://blog.csdn.net/tianizimark/article/details/121712792手把手系列--华邦W25Q128JV Flash操作指南_coder.mark的博客-CSDN博客_w25q128jv![]() https://blog.csdn.net/tianizimark/article/details/121717803理解SPI/Dual SPI/Quad SPI/QPI之间的区别_coder.mark的博客-CSDN博客
https://blog.csdn.net/tianizimark/article/details/121717803理解SPI/Dual SPI/Quad SPI/QPI之间的区别_coder.mark的博客-CSDN博客![]() https://blog.csdn.net/tianizimark/article/details/124608851
https://blog.csdn.net/tianizimark/article/details/124608851
一、目的
前段时间淘了一块STM32H750XBH6_ArtPi开发板,板载两颗华邦的Flash芯片,一颗为W25Q64JV(8Mbytes),通过STM32H750XBH6的QUADSPI控制用于XIP;一颗为W25Q128JV(16Mbytes)用于数据存储。
然后W25Q64JV使用Quad SPI方式连接,W25Q128JV使用标准SPI连接。
本博文基于此开发板从基础给大家介绍一下STM32 Quad SPI的功能。
按照惯例,我们从官网找到如下资料。
参考ST官方Quad SPI使用文档

Quad-SPI接口一般用于数据存储或者用于代码执行。
另外官网还有一个特别好的中文资料

二、介绍
QUADSPI系统框图


STM32系列芯片上的Quad-SPI允许主机和外部Quad-SPI存储设备之间进行四根数据线通信;其支持传统的SPI也支持双线模式;Quad-SPI使用最多6根线。

我们开发板上的芯片为STM32H750XBH6,其Quad-SPI支持的SDR(单时钟速率下)最大时钟频率为133MHz, DDR(双时钟速率下)为100MHz;硬件FIFO最大32字节,支持双Flash,即BINK1和BINK2,并且这两个BANK可以级联组成一个8线的外部存储;内存映射模式下最大支持256Mbytes的大小,间接模式下支持4Gbytes空间。
在内存映射模式下,Quad-SPI接口被映射到AHB总线上,也就是说AHB总线可以直接读取数据(即通过指针直接读取)。

Quad-SPI接口提供了一个完全可配置的帧格式,最大包含五个阶段并且每个阶段都可以完全配置(也就是说每个阶段的数据长度和数据线数完全可以独立配置)。
从上图我们可以看到这五个阶段分别为指令阶段、地址阶段、交替(可选)字节阶段、空指令阶段、数据阶段。一般情况下都是会有指令阶段。进行数据读写时一般包括指令、地址、数据阶段l;特殊情况下尤其是高速数据读写时需要设置空指令周期(和外部Flash芯片强相关)。
指令阶段

指令阶段只可以发送一个字节的数据,通过往寄存器QUADSPI_CCR[7:0]的INSTRUCTION字段写入即可。指令可以通过1/2/4线发送。一般1线的比较常见。

IMODE[1:0]=00代表没有指令阶段。
地址阶段

地址阶段可以发送1/2/3/4个字节,写入QUADSPI_AR寄存器即可;可以通过1/2/4线发送,通过ADSIZE指定地址字节长度,通过ADMODE指定是否有地址/1线/2线/4线模式。
交替字节阶段

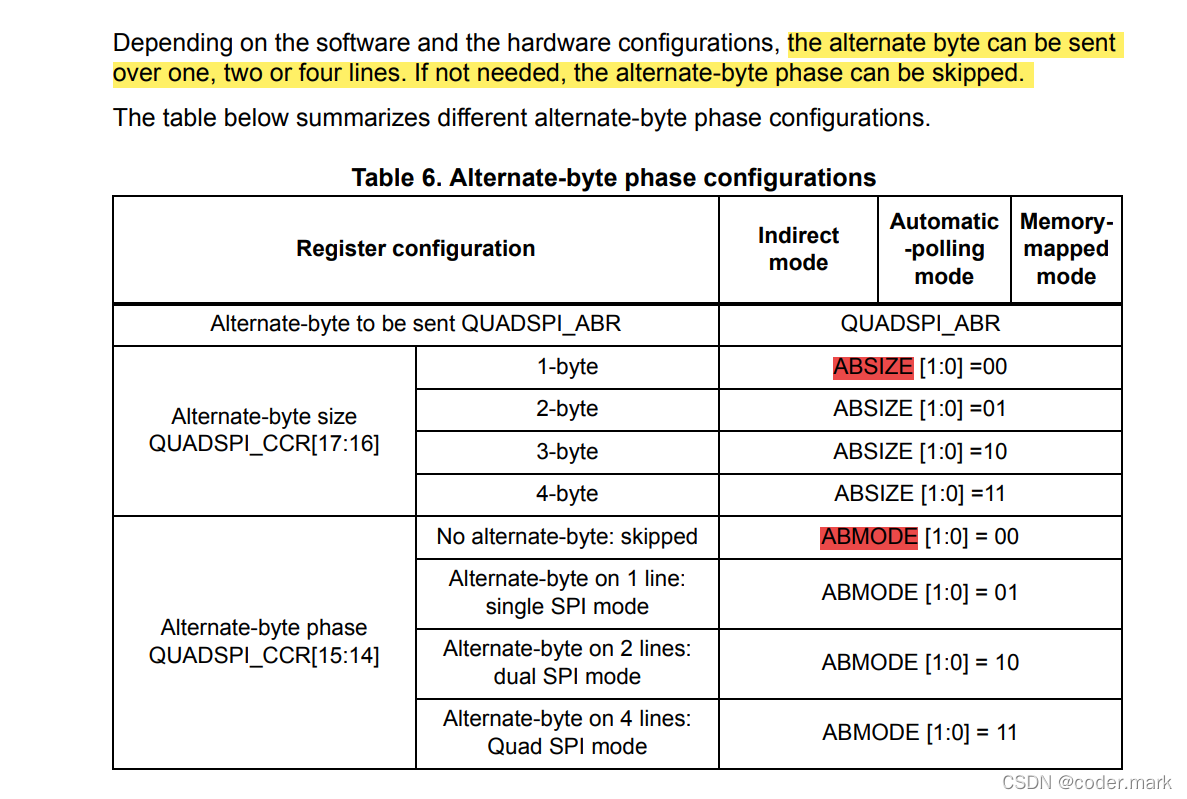
通过ABSIZE指定发送的1/2/3/4字节,通过ABMODE指定是否有交替字节、1/2/4线发送。选项字节写入QUADSPI_ABR寄存器。
空指令阶段

空指令周期用于高速通信的场景中,用于确保数据信号从输出模式转变为输入模式。
通过DCYC[4:0]最大可以设置31个周期。
注意:如果使用了QUADSPI硬件配置并且此周期内使用Quad-SPI或者Dual-SPI模式,则IO2被硬件强制设置为0来金庸写保护功能并且IO被硬件强制设置为1来禁用保持功能。
数据阶段
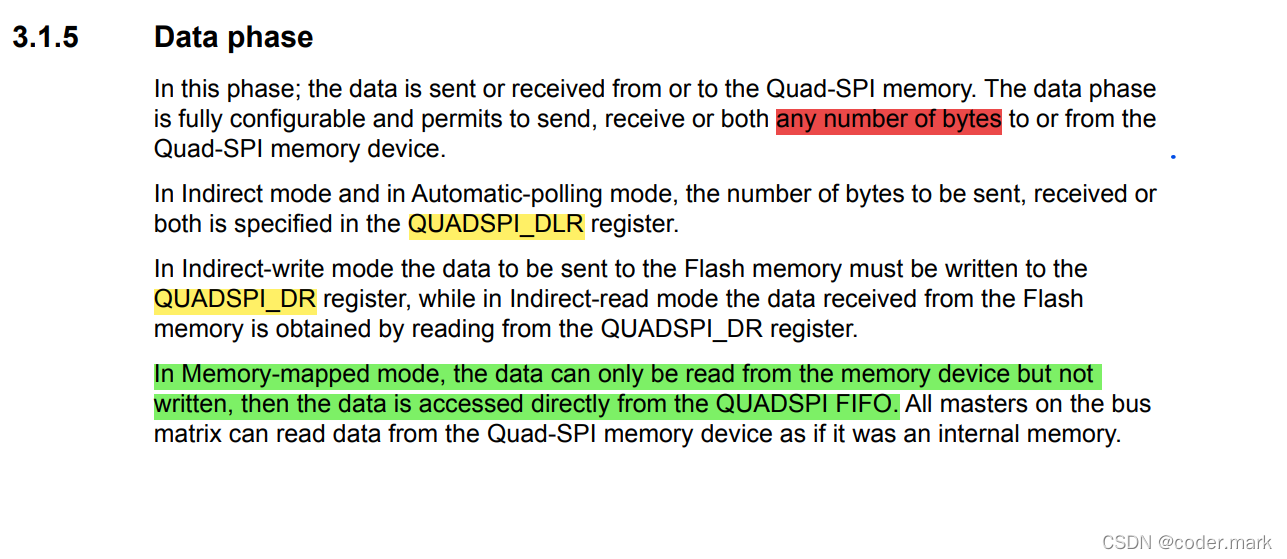
数据阶段可以配置读写任意字节的数据。通过QUADSPI_DLR设置数据长度,通过QUADSPI_DR寄存器读写数据;
在内存映射模式下只能读取数据,其通过QUADSPI FIFO进行读取。总线矩阵上的任意主机都可以将其当作内部存储进行读取数据。

数据阶段可以1/2/4线发送,也可以没有数据阶段。如果QUADSPI_DLR=0xFFFFFFFF,则数据传输直到字节数等于FSIZE。
硬件配置

上图是标准SPI模式。注意IO0只能输出,IO1只能输入。

上图是dual-SPI模式,注意注意IO0/IO1为双向通信。

上图是Quad-SPI模式,注意注意IO0/IO1/IO2/IO3为双向通信。
双闪存模式

双闪存模式下,指令、地址、交替字节、空指令周期同时发送给BINK1和BINK2。


三种操作模式
间接模式
间接模式用于读写、擦除操作;所有的操作都是通过QUADSPI数据寄存器来执行,可以使用CPU也可以使用中断和DMA;也用于配置Quad-SPI Flash内存。
传输的数据通过数据寄存器和FIFO。
自动轮询模式用于检测Flash内存中的状态寄存器的改变并产生中断,在检查擦除或者编程操作时特别有用(检查擦除或者编程是否完成)。
状态标志轮询模式

用于读取Quad-SPI Flash内存的状态以及用于检测擦除或者编程的完成。开发者可以配置轮询周期以及轮询的掩码和匹配模式(与/或);当匹配发生时,自动产生中断并且停止。
内存映射模式

用于读操作;将外部Quad-SPI Flash存储空间看作是内部空间,这样任何AHB主设备就可以自动读取;使用内存映射模式,QuadSPI自动管理预取机制,这可以优化外部Flash的读写执行性能 。

内存映射模式下最大访问大小为256Mbytes,访问地址为0x90000000 - 0x9FFFFFFF;
代码可以直接从外部Quad-SPI存储器里面执行。
不支持直接从外部Quad-SPI Flash启动,但是可以先从内部Flash启动,然后配置QUADSPI为内存映射模式,然后就可以从外部Quad-SPI Flash执行代码。
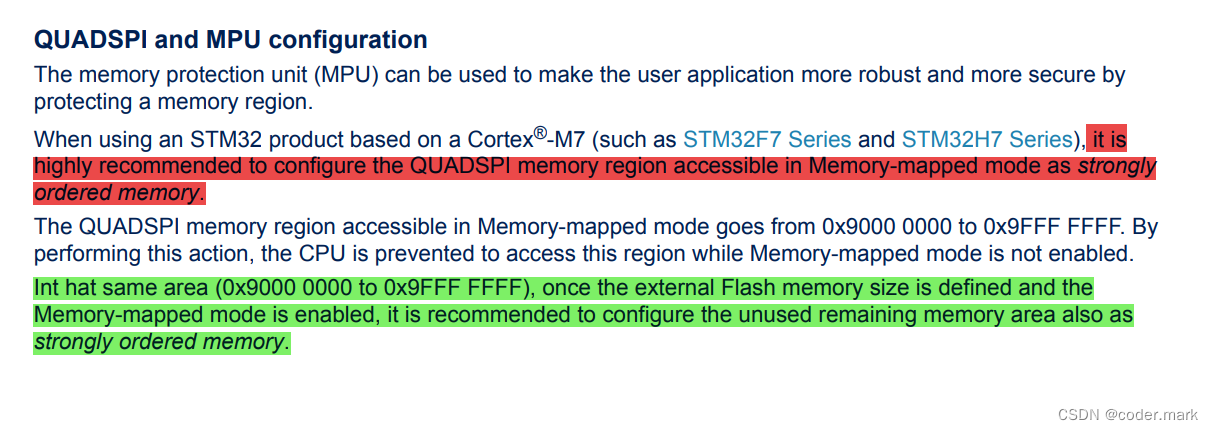
上图是内存映射模式下建议的MPU设置为strongly-ordered类型,关于这个知识点请参考
理解STM32上的MPU和Cache (一)_coder.mark的博客-CSDN博客_单片机mpu![]() https://blog.csdn.net/tianizimark/article/details/124698926
https://blog.csdn.net/tianizimark/article/details/124698926
中断描述

总共有5个中断,分别为超时、状态匹配(状态轮询模式时)、FIFO达到阈值(间接模式)、传输完成(间接模式下QUADSPI_DLR指定的字节数的数据已经发送完成)(所有模式下传输被终止)、传输错误(间接模式下地址越界);
使用中断必须使能QUADSPI全局中断。
DMA描述

间接模式下可以DMA读写外部Quad-SPI Flash,内存映射模式下只支持读取。
在DMA模式下,DMA负责过程控制。
当QUADSPI FIFO达到阈值条件并且DMAEN位已经设置,则QUADSPI产生DMA请求到DMA控制器。
如果DMAEN已经为1,如果需要更改FTHRES/FMODE则DMA控制器必须先禁用。
三、实战
经过上面的讲解,大家应该对QUADSPI已经有了一个大致了解,下面我们通过代码工程来进一步加深理解。
本篇我们只讲述CPU轮询方式控制,至于中断和DMA方式的实现,后面再给大家讲解。(要先给大家讲解一下移植FreeRTOS,不然中断或者DMA模式跟轮询的方式效果上没有大的差别)。
下面我们来创建一个工程,为了简单我们还是使用STM32CubeMX生成一个Keil MDK工程
参考《手把手系列--使用STM32CubeMX生成代码工程》
为方便学习,这边提供的已经准备好的工程给大家下载
链接:https://pan.baidu.com/s/1G_k7gXvPgc9O-sy3aqGBpw
提取码:r2fl
工程中我们提供了W25Q64JV的驱动源码,下面我们根据源码一一讲解如何使用Quad-SPI。
我们在Keil MDK工作下添加W25Q64JV分组用于存放其驱动代码。
在主函数中我们做了如下操作

初始化HAL,设置系统时钟,设置GPIO,设置QUADSPI,初始化并复位W25Q64JV;然后我们读取了一下W25Q64JV的ID,如果成功则先读取一下地址为0的4Kbytes的数据,然后我们进行写数据,再读取出来,通过调试模式,查看test_buf的数据是否跟我们代码设置的一样。
关于W25Q64JV的描述请参考《手把手系列--华邦W25Q64JV Flash操作指南》。
我们就以W25Q64JV的写使能命令为例说明

首先我们先来看QSPI_CommandTypeDef这个结构体

Instruction字段设定我们需要发送的指令,当前我们设定为W25Q64JV_WRITE_ENABLE(0x06);
Address字段设定我们需要发送的地址(当前指令下不需要发送地址);
AlternateBytes字段设定交替字节阶段的数据(当前指令下不需要交替字节);
AddressSize字段设定地址阶段的字节数(当前指令下不需要地址);
AlternateBytesSize字段设定交替字节阶段的字节数(当前指令下不需要交替字节);
DummyCycles字段设定空指令阶段的周期数(当前指令下不需要空指令);
InstructionMode字段设定指令的发送方式,即选用1/2/4线进行指令的发送;根据W25Q64JV芯片手册说明,我们应该选用一线,即QSPI_INSTRUCTION_1_LINE;
AddressMode字段设定地址的发送方式,即选用1/2/4线进行地址的发送(当前指令下不需要发送地址字节);
AlternateByteMode字段设定交替字节的发送方式,即选用1/2/4线进行交替字节的发送(当前指令下不需要发送交替字节);
DataMode字段设定数据的发送方式,即选用1/2/4线进行交替字节的发送(当前指令下不需要发送数据);
NbData字段设定需要发送的数据字节的数量(当前指令下不需要发送数据);
DdrMode字段设定使用double date rate,即双数据速率,即一个时钟周期内发送两个bit(当前指令下不需要);
当我们设定好结构体相关字段后,我们就可以调用HAL_QSPI_Command接口发送请求,由于这条指令只有发送没有接收,所以我们不需要调用HAL_QSPI_Receive获取数据。
这其实是Quad-SPI间接模式的使用(即通过STM32 Quad-SPI寄存器来控制W25Q64JV)。
接下来我们再分析一下这条函数调用
HAL_QSPI_AutoPolling(&hqspi, &cmd, &conf, HAL_QPSI_TIMEOUT_DEFAULT_VALUE)
首先我们需要看下cmd这个变量,我们设定了Instruction为W25Q64JV_STATUS_REG1(读W25Q64JV状态寄存器1的值);
我们又定义了一个QSPI_AutoPollingTypeDef类型的变量

字段Match设定匹配值;
字段Mask设定需要匹配掩码;
字段Interval设定状态轮询的周期;
字段StatusBytesSize设定读取的状态字节数;
字段MatchMode设定匹配的模式(与、或);
字段AutomaticStop设定匹配成功后是否自动停止;
由于我们需要检测状态寄存器1的bit1位是否为1(WEL位为1);故我们如下设定:

这其实是Quad-SPI状态轮询机制的使用。
QSPI_W25Q64JV_WriteEnable这个接口就是W25Q64JV进行擦除、页编程必须要调用的。
下面我们再看下擦除操作的代码

在擦除接口中,我们首先先发送了写使能指令,然后发送了擦除指令并且设置了擦除首地址,注意该接口入参SectorAddress必须时4096的整数倍,这个是由Flash芯片决定的;擦除指令发送完后我们通过状态轮询模式检查Flash是否真正擦除完毕。
我们再看一下写数据接口

特别要注意的是QSPI_W25Q64JV_Write这个接口实现细节,这个接口会根据当前Flash内部的数据来决定是否需要先进行擦除然后再页编程。
首先我们通过对入参WriteAddr取整获取该地址所在的区号,取余获取该地址在区内的偏移。
然后读取该区的所有数据并判断从区内偏移处往后的数据是否全为0xFF;如果是则说明不需要擦除,可以直接编程;否则我们需要擦除整个区,并把当前要写入的数据填充到w25q64jv_buf对应位置后再编程。
至于其他接口的实现细节,大家可以阅读源码分析。
至此,STM32 Quad-SPI的基础知识基本讲解完毕,后续要继续添加中断和DMA的使用。
这篇关于手把手系列--STM32 QSPI操作指南的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





