本文主要是介绍ESP32C3小飞控调试,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ESP32C3小飞控调试 - 1
ESP32C3小飞控板赶在国庆节前发出打样,假期后上班就收到了样板,但是迟迟没有动手调试,这两天终于抽出时间调试了,调试过程还算顺利,基本没有遇到什么大问题,下面记录一下调试过程。
原理图
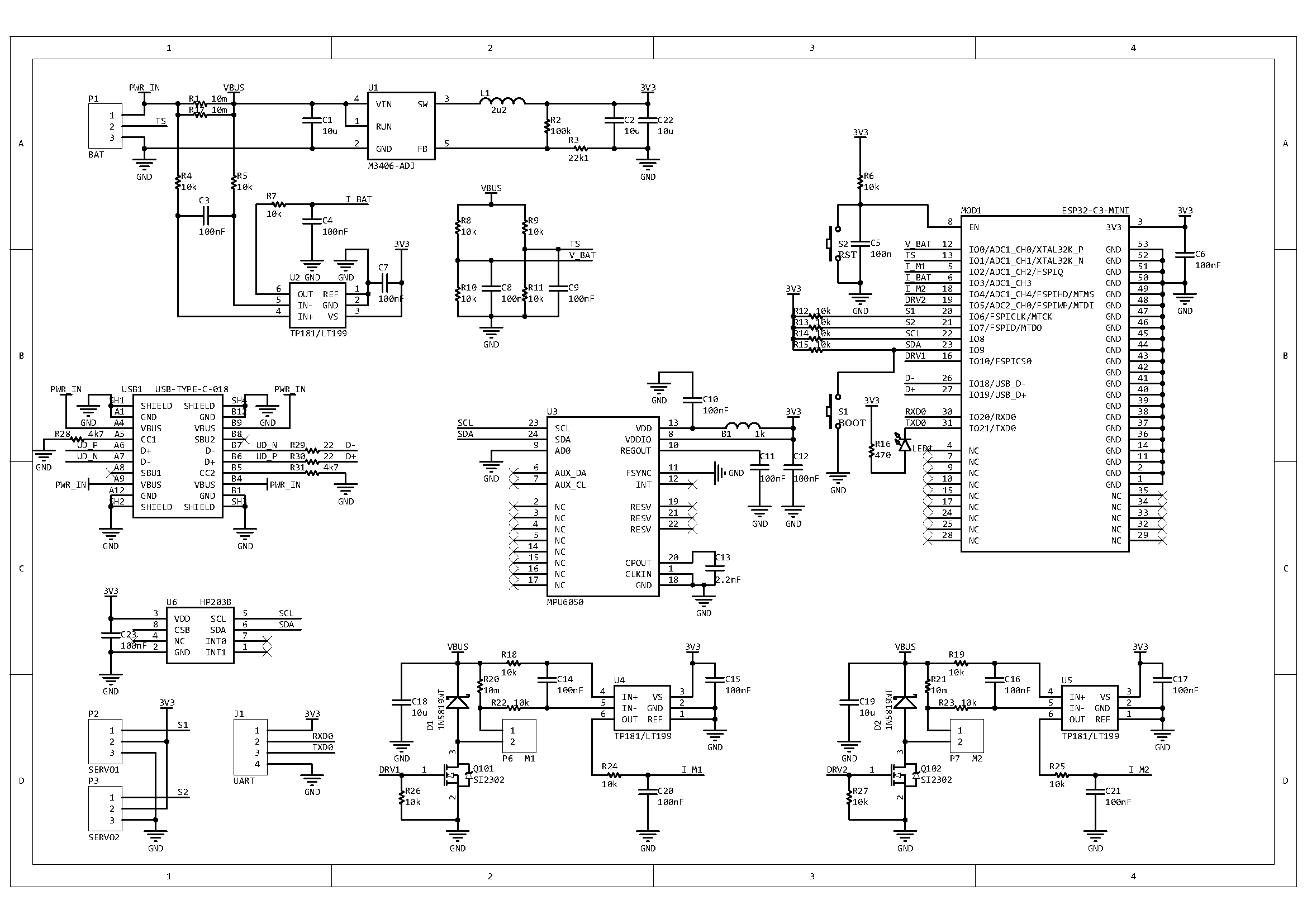
比计划中多加了一个大气压力传感器,用作测高。主要特性:
- 单串锂电池供电,最大工作电压5.5V
- 电源电压、电流感测
- 锂电池温度感测
- DCDC降压电源,效率90%以上
- 3轴加速度计,3轴陀螺仪
- 气压计,高度精度10cm
- 2路动力电机通道,支持电流感测
- 2路数字IO通道
- USB TypeC接口,调试和烧写程序
- 1路串口,可用于连接GPS
PCB
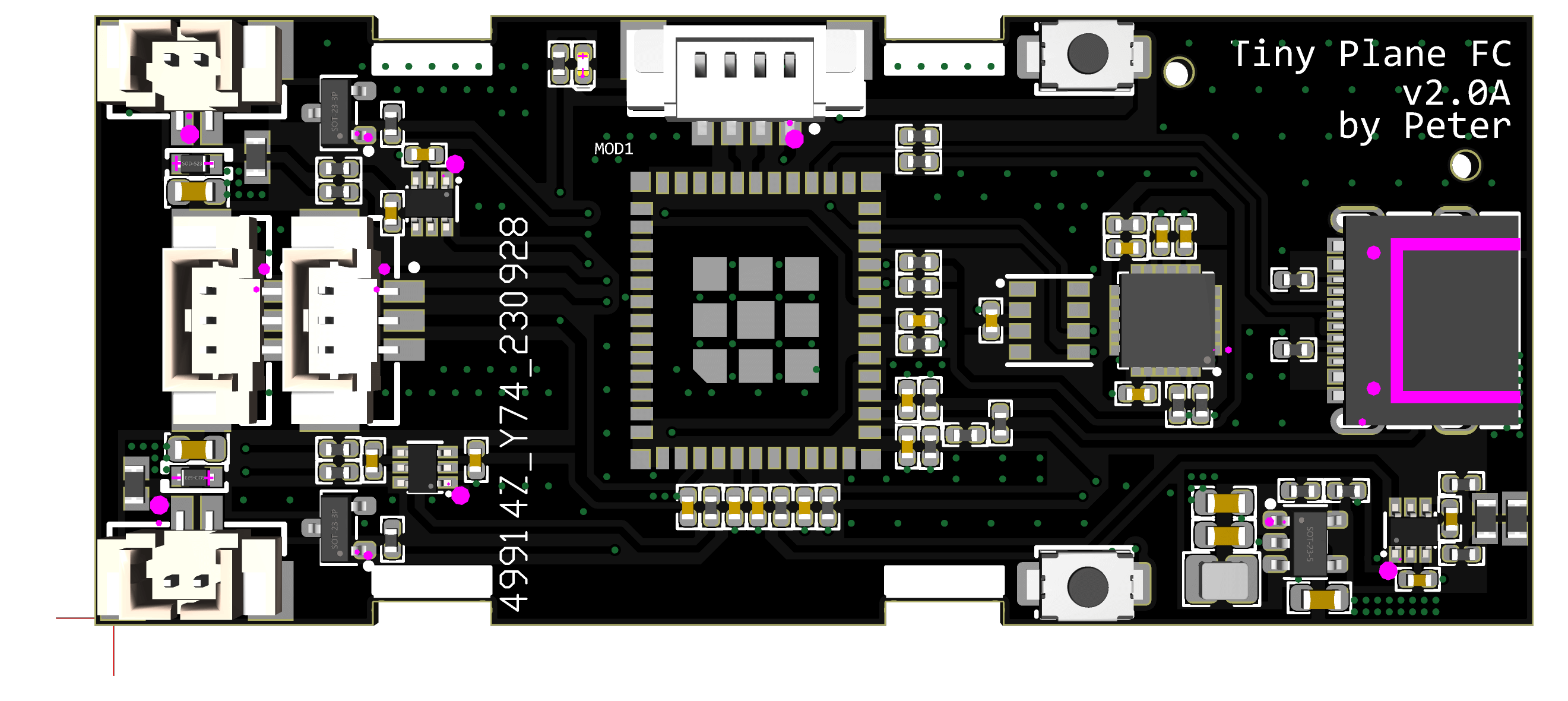
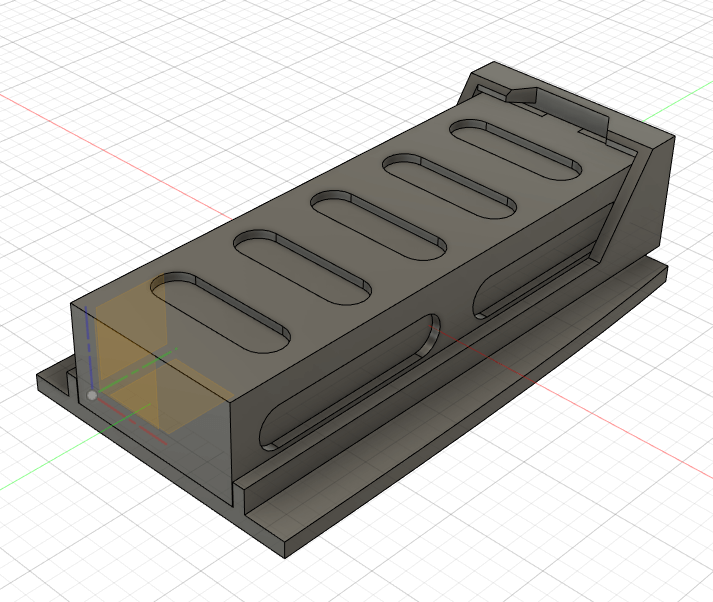
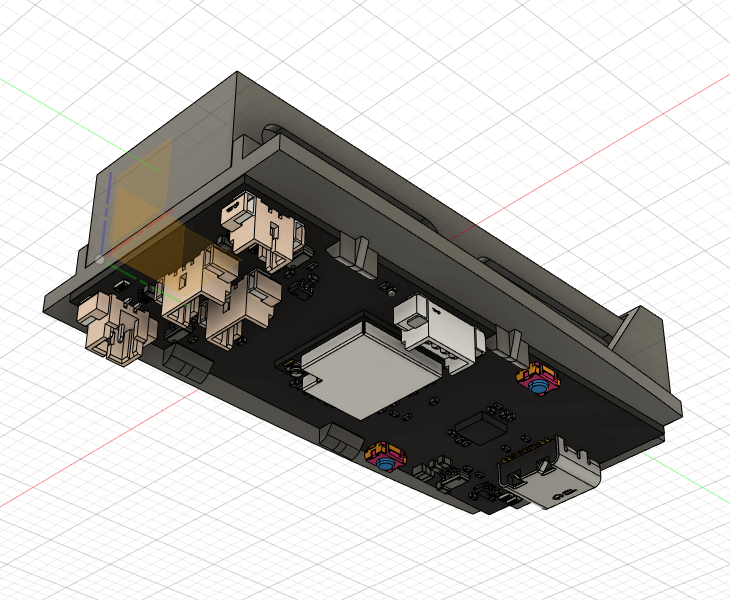
板形主要是为了跟3d打印的机头座舱配合:

这个安装座下面固定飞控电路板,上面装电池:
电路板除了ESP32C3 WiFi模块和气压计都是打样直接贴好的,板子收到后焊ESP32C3模块出了一点问题,5片样板只有一片一次点亮。
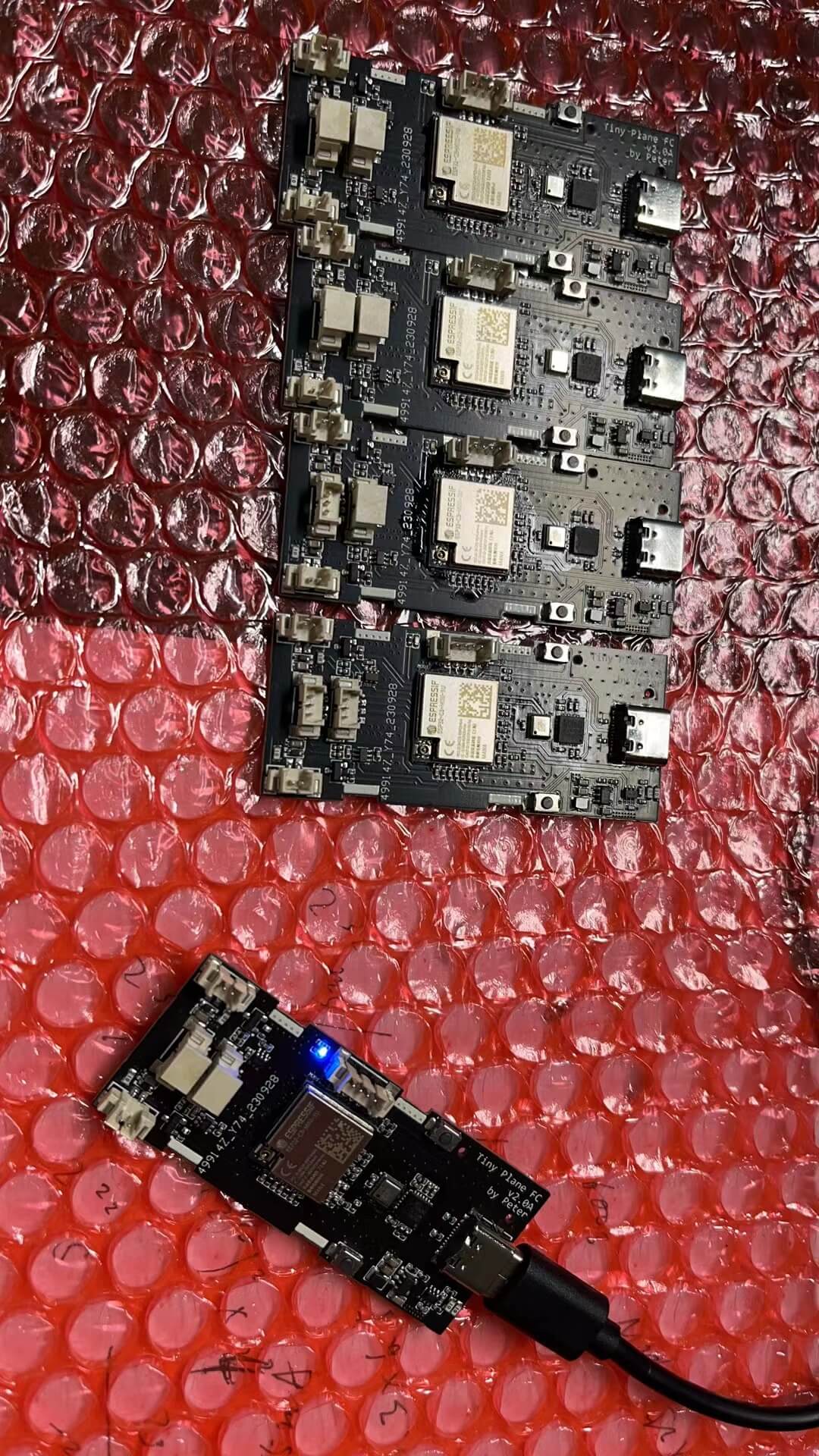
还是大意了啊!是用加热台焊的,没有低温锡膏,就用的中温锡膏,加热台调到200℃,没点亮的板子主要的问题就是模块焊盘没有预先上锡。这个LGA焊盘较多,且很多GND焊盘,用加热台时会导致模块上的焊盘温度不够而不上锡,预先上好锡后,再次放加热台上面,焊锡熔化后再稍微压一下模块,就OK了。
调试
这两天把ADC、I2C、PWM、WiFi都单独跑通了,开始陆续整合,今天把动力电机的调试记录一下。
程序主要就是ADC和PWM的初始化,加上设置PWM占空比和获取ADC读数的函数,比较简单。将WiFi模块连接到局域网后,通过udp通信,由PC控制占空比,并获取ADC读数。
ESP32C3的PWM占空比分辨率还是很高的,5kHz频率下有13位,即8192,我在上位机程序中每0.1s发送一次数据,将占空比加100,加到4000后再每次减100。
ESP32C3小飞控试车
终端窗口中左侧是ESP32C3的调试输出,显示udp通信源地址和收到的占空比数值;右侧是控制端程序输出,有3列,分别是占空比、电机通道1的ADC读数、电机通道2的ADC读数。
从视频中可以看到,单个电机在50%占空比下,静态推力在14g左右,ADC电流值还没校准,显示的是原始读数,精度为12位,即4096。
附上测试程序:
import socket
import time
import structclient_socket = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)server_ip = '192.168.1.79'
server_port = 3333
server_address = (server_ip, server_port)while True:for i in range(80):if i > 40:pwm = 8000 - i * 100else:pwm = i * 100client_socket.sendto(pwm.to_bytes(4, "little") + pwm.to_bytes(4, "little"), server_address)data, _ = client_socket.recvfrom(1024)data1, data2 = struct.unpack("<ii", data)print(pwm, data1, data2)time.sleep(0.1)client_socket.close()
这篇关于ESP32C3小飞控调试的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






