本文主要是介绍Profinet从站研究-西门子ERTEC 200P典型应用APP4解析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Profinet是什么?
Profinet是一种用于工业自动化领域的通信协议。它是以太网技术在工业现场的应用,旨在实现高速、可靠的数据交换和实时控制。Profinet允许工业设备(如传感器、执行器、PLC等)通过以太网相互通信。
目前有哪些Profinet从站方案?
目前有西门子、瑞萨、赫优讯(Hilscher)、HMS等厂家提供Profinet ASIC 芯片解决方案。其中,西门子作为Profinet的提出者和提倡者,还提供了完整的Profinet从站协议栈。其协议栈对于Profinet技术的研究和应用具有很强的指导作用。
Profinet从站典型应用方式有哪些?
西门子在《Interface_Description_PN_IO_DevKits_V4.7.0.pdf》中提出了4种典型应用方式(简称APP1、APP2、APP3、APP4)。分别对应标准IO、数据量较大的IO节点、实时性要求高(小于1ms)的IO节点以及应用程序复杂的工控节点(例如伺服控制器)4种场景。
其中,APP1~3的应用程序是基于西门子ERTEC 200P芯片提供的开发环境(不熟悉的可以参考芥末博士的系列博文
link)。
APP4概述
APP4与上述的不同主要体现在:
1.硬件上,需要在ERTEC 200P芯片以外单独加一片MCU(此MCU主要用于运行更复杂的工控类应用程序)。下图是西门子官方给出的APP4对应的硬件框图,图中外接的mcu是TI AM3358,操作系统为linux。实际使用中可以替换成其他mcu以及其他实时操作系统(如freertos等)。
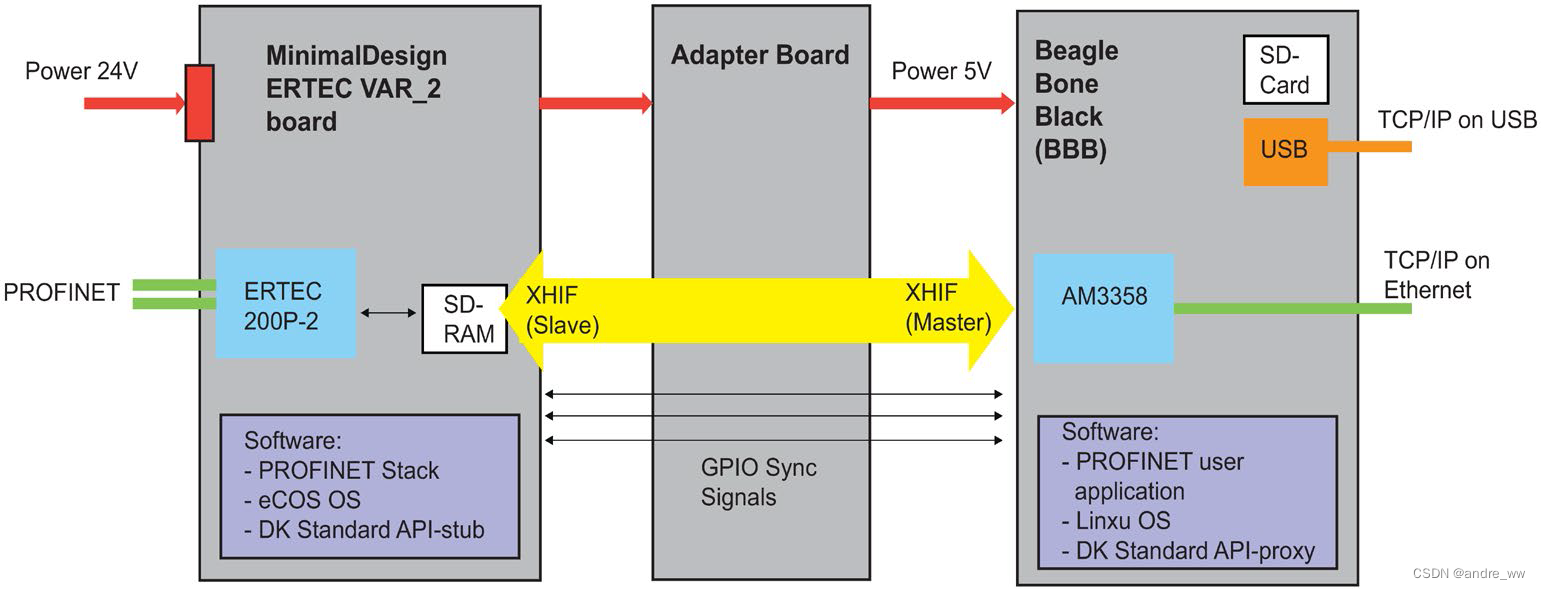
2.驱动上,通过并口(图上叫XHIF,也叫FSMC、FMC等),外部的MCU可以直接操作SDRAM写入/读取数据。同时外部的MCU与ERTEC 200P通过GPIO实现信号的同步。
3.软件上,APP4虽然使用和APP1~3相同的API接口(见西门子官方《Interface_Description_PN_IO_DevKits_V4.7.0.pdf》),但是实际上采用了RPC的通信模式。即当外部MCU需要与Profinet控制器进行交互时,先通过XHIF接口把数据发送给ERTEC 200P,再由ERTEC 200P实现具体的功能,最后再返回结果;反之(Profinet控制器需要与外部MCU进行交互时)亦然。
APP4详解
APP4的程序分为两部分。在西门子开发套件中,源码分别存放于App4_XHIF和App4_XHIF_Host文件夹。这两个文件夹分别对应ERTEC 200P的软件程序和外部MCU的软件程序。
由于ERTEC 200P与外部MCU直接进行交互(A写B读,或者B写A读),所以分析其中一个便可以得知其交互逻辑。以下以App4_XHIF_Host文件夹中(即外部MCU)的代码为例进行分析。
数据存储方式
首先因为外部MCU要通过访问SDRAM与ERTEC 200P进行数据交互,所以先看SDRAM中数据的存储方式。如下图。

由图可知,SDRAM中划分了5个存储区域。前4个存储区域分别用于存放两个方向(ERTEC 200P-》外部MCU和外部MCU-》ERTEC 200P)的周期数据(PNPB_XHIF_SECTION_CYC_IN和PNPB_XHIF_SECTION_CYC_OUT)和非周期数据(PNPB_XHIF_SECTION_ACY_IN和PNPB_XHIF_SECTION_ACY_OUT),最后一个存储区域用于存放程序记录的trace数据。
周期数据存储方式
存储在周期数据存储区(PNPB_XHIF_SECTION_CYC_IN和PNPB_XHIF_SECTION_CYC_OUT)的最小数据结构为:
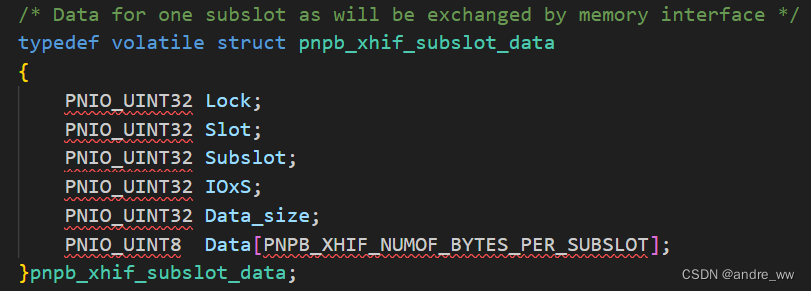
其中,Lock是互斥锁,防止外部MCU和ERTEC 200P同时对同一数据进行操作(读或写);
Slot是槽编号;
Subslot是子槽编号;
IOxS是状态字;
Data_size是数据长度;
Data是数据buffer,长度默认为256字节。
非周期数据存储方式
存储在非周期数据存储区(PNPB_XHIF_SECTION_ACY_IN和PNPB_XHIF_SECTION_ACY_OUT)的最小数据结构为:
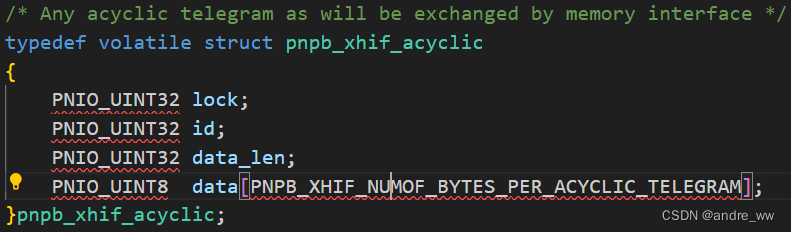
其中,Lock是互斥锁,防止外部MCU和ERTEC 200P同时对同一数据进行操作(读或写);
id是功能的编号,包括设备启动、设备停止、发送告警等(详情见附录)。例如外部MCU想向profinet主站(plc)发送一个事件告警,要先通过数据交互的方式把命令发送给ERTEC 200P,再由ERTEC 200P执行对应的功能。这种方式叫做远程过程调用,简称RPC;
Data_size是参数长度;
Data是参数buffer,存放前面的id对应的功能所需要的参数,长度默认为1024字节。
数据同步方式
外部MCU与ERTEC 200P进行数据交互(读/写SDRAM)后,还需要使用信号通知对方。这里,最简单的实现方式是采用gpio管脚电平信号。
以下为App4_XHIF_Host例程中对gpio管脚的定义:
SEM0是ERTEC 200P的标志位,当SEM0值为1(高电平)时,表示ERTEC 200P已完成启动,正常运行中。
/* SEM0 - ertec ready flag */rv = bbb_gpio_open(GPIO_BANK_0, GPIO_NUM_15, bbb_gpio_input);if(PNPB_OK != rv){printf("Cannot open SEM0 (GPIO library error)!\n");PNPB_LIB_FATAL}
SEM1是非周期数据发送标志位,当外部MCU向ERTEC 200P发送一次非周期数据后,翻转此信号(先拉高在拉低)。通知200P从SDRAM中取数据。
/* Open SEM1 - command to Ertec */if(PNPB_OK != bbb_gpio_open(GPIO_BANK_0, GPIO_NUM_14, bbb_gpio_output)){printf("Cannot open SEM1 (GPIO library error)!\n");PNPB_LIB_FATAL}
SEM3是非周期数据接收标志位,当ERTEC 200P向外部MCU发送一次非周期数据后,翻转此信号(先拉高在拉低)。通知外部MCU从SDRAM中取数据。
/* SEM3 - acyclic receival*/rv = bbb_gpio_open(GPIO_BANK_3, GPIO_NUM_19, bbb_gpio_input);if(PNPB_OK != rv){printf("Cannot open SEM3 (GPIO library error)!\n");PNPB_LIB_FATAL}
SEM2是非周期数据接收确认标志位,当外部MCU收到一次ERTEC 200P发送的非周期数据后,翻转此信号(先拉高在拉低)。与ERTEC 200P进行同步。
/* SEM2 - confirmation of acyclic receival */rv = bbb_gpio_open(GPIO_BANK_3, GPIO_NUM_21, bbb_gpio_output);if(PNPB_OK != rv){printf("Cannot open SEM2 (GPIO library error)!\n");PNPB_LIB_FATAL}
IRT SYNC 0是周期数据接收确认标志位,当ERTEC 200P向外部MCU发送一次周期数据后,翻转此信号(先拉高在拉低)。通知外部MCU从SDRAM中取数据。
/* IRT SYNC 0 - cyclic receival*/rv = bbb_gpio_open(GPIO_BANK_3, GPIO_NUM_17, bbb_gpio_input);if(PNPB_OK != rv){printf("Cannot open IRT SYNC 0 (GPIO library error)!\n");PNPB_LIB_FATAL}
写在最后
以上就是西门子ERTEC 200P典型应用APP4的交互机制分析。
使用工控芯片要做到不仅知其然,更知其所以然。这样不仅会对应用的开发起指导作用,还可以自行调整优化相关api,以实现更好的性能与更大的灵活性。
附录:功能id列表
/* Memory interface telegram IDs - Have to comply with same on Ertec side */
typedef enum PNPB_XHIF_ACYC_TELEGRAMS
{/* Ertec - Host */PNPB_XHIF_ACYC_NO_TELEGRAM = 0,PNPB_XHIF_ACYC_AR_CONNECT_IND,PNPB_XHIF_ACYC_AR_OWNERSHIP_IND,PNPB_XHIF_ACYC_AR_OWNERSHIP_IND_MORE_FOLLOWS,PNPB_XHIF_ACYC_PARAM_END_IND,PNPB_XHIF_ACYC_READY_FOR_INPUT_UPDATE_IND,PNPB_XHIF_ACYC_AR_INDATA_IND,PNPB_XHIF_ACYC_AR_DISCONNECT_IND,PNPB_XHIF_ACYC_REPORT_ARFSU_RECORD,PNPB_XHIF_ACYC_SUB_PLUG_LIST_CBF,PNPB_XHIF_ACYC_ASYNC_REQUEST_DONE,PNPB_XHIF_ACYC_ASYNC_REQUEST_ERROR,PNPB_XHIF_ACYC_REC_READ,PNPB_XHIF_ACYC_REC_READ_MORE_FOLLOWS,PNPB_XHIF_ACYC_REC_WRITE,PNPB_XHIF_ACYC_REC_WRITE_MORE_FOLLOWS,PNPB_XHIF_ACYC_AMR_READ,PNPB_XHIF_ACYC_PE_RESPONSE,PNPB_XHIF_ACYC_PE_REQUEST,PNPB_XHIF_ACYC_PE_REQUEST_MORE_FOLLOWS,PNPB_XHIF_ACYC_NV_DATA_SYNC,PNPB_XHIF_ACYC_NV_DATA_SYNC_MORE_FOLLOWS,PNPB_XHIF_ACYC_NV_DATA_FLASH_DONE,PNPB_XHIF_ACYC_IM_DATA_FLASH_DONE,PNPB_XHIF_ACYC_NV_DATA_RESET_DONE,PNPB_XHIF_ACYC_SUBSTVAL_OUT_READ,PNPB_XHIF_ACYC_SAVE_STATION_NAME,PNPB_XHIF_ACYC_SAVE_IP_ADDR,PNPB_XHIF_ACYC_STORE_REMA_MEM,PNPB_XHIF_ACYC_STORE_REMA_MEM_MORE_FOLLOWS,PNPB_XHIF_ACYC_REPORT_NEW_IP_ADDR,PNPB_XHIF_ACYC_RESET_FACTORY_SETTINGS,PNPB_XHIF_ACYC_RESULT_NEW_DEVICE_ADDRESS,PNPB_XHIF_ACYC_START_LED_BLINK,PNPB_XHIF_ACYC_STOP_LED_BLINK,PNPB_XHIF_ACYC_DEVICE_STARTUP_DONE,PNPB_XHIF_ACYC_TRACE_READY,PNPB_XHIF_ACYC_RETURN_ISR_HANDLE,PNPB_XHIF_ACYC_PERFORM_ISR_CALLBACK,PNPB_XHIF_ACYC_RESPONSE_APDU_STATUS,PNPB_XHIF_ACYC_IM_WRITE,PNPB_XHIF_ACYC_IM_WRITE_MORE_FOLLOWS,PNPB_XHIF_ACYC_IM_READ,PNPB_XHIF_ACYC_IM_STORE,PNPB_XHIF_ACYC_IM_STORE_MORE_FOLLOWS,PNPB_XHIF_ACYC_NV_DATA_STORE_HOST,PNPB_XHIF_ACYC_NV_DATA_STORE_HOST_MORE_FOLLOWS,PNPB_XHIF_ACYC_NV_DATA_SET_DEFAULT,PNPB_XHIF_ACYC_NV_DATA_SET_DEFAULT_MORE_FOLLOWS,/* To find out number of defined cbf telegrams */PNPB_XHIF_ACYC_NUM_OF_ERTEC_HOST_TELEGRAMS,/* Host - Ertec */PNPB_XHIF_ACYC_DIAG_CHANNEL_ADD = 128, /* First in this direction (as featurespec)*/PNPB_XHIF_ACYC_DIAG_CHANNEL_REMOVE,PNPB_XHIF_ACYC_EXT_DIAG_CHANNEL_ADD,PNPB_XHIF_ACYC_EXT_DIAG_CHANNEL_REMOVE,PNPB_XHIF_ACYC_DIAG_GENERIC_ADD,PNPB_XHIF_ACYC_DIAG_GENERIC_REMOVE,PNPB_XHIF_ACYC_PROCESS_ALARM_SEND,PNPB_XHIF_ACYC_STATUS_ALARM_SEND,PNPB_XHIF_ACYC_RET_OF_SUB_ALARM_SEND,PNPB_XHIF_ACYC_UPLOAD_RETRIEVAL_ALARM_SEND,PNPB_XHIF_ACYC_DEVICE_SETUP,PNPB_XHIF_ACYC_DEVICE_SETUP_MORE_FOLLOWS,PNPB_XHIF_ACYC_DEVICE_START,PNPB_XHIF_ACYC_DEVICE_STOP,PNPB_XHIF_ACYC_DEVICE_AR_ABORT,PNPB_XHIF_ACYC_DEVICE_OPEN,PNPB_XHIF_ACYC_ACTIVATE_IO_DAT_XCH,PNPB_XHIF_ACYC_DEACTIVATE_IO_DAT_XCH,PNPB_XHIF_ACYC_SLAVE_REBOOT,PNPB_XHIF_ACYC_SUB_PLUG_LIST,PNPB_XHIF_ACYC_SUB_PLUG,PNPB_XHIF_ACYC_SUB_PULL,PNPB_XHIF_ACYC_SUBSTVAL_OUT_READ_DONE,PNPB_XHIF_ACYC_SET_DEV_STATE,PNPB_XHIF_ACYC_REC_READ_RSP,PNPB_XHIF_ACYC_REC_READ_RSP_MORE_FOLLOWS,PNPB_XHIF_ACYC_REC_WRITE_RSP,PNPB_XHIF_ACYC_REC_WRITE_RSP_MORE_FOLLOWS,PNPB_XHIF_ACYC_AMR_READ_RSP,PNPB_XHIF_ACYC_AMR_READ_RSP_MORE_FOLLOWS,PNPB_XHIF_ACYC_PE_RESPONSE_RSP,PNPB_XHIF_ACYC_PE_RESPONSE_RSP_MORE_FOLLOWS,PNPB_XHIF_ACYC_PE_REQUEST_RSP,PNPB_XHIF_ACYC_NV_DATA_INIT,PNPB_XHIF_ACYC_NV_DATA_INIT_MORE_FOLLOWS,PNPB_XHIF_ACYC_NV_DATA_CLEAR,PNPB_XHIF_ACYC_NV_DATA_STORE,PNPB_XHIF_ACYC_NV_DATA_STORE_MORE_FOLLOWS,PNPB_XHIF_ACYC_NV_DATA_IM_STORE,PNPB_XHIF_ACYC_NV_DATA_IM_STORE_MORE_FOLLOWS,PNPB_XHIF_ACYC_GET_LAST_APDU_STATUS,PNPB_XHIF_ACYC_SET_IOPS,PNPB_XHIF_ACYC_ISO_ACTIVATE_ISR_OBJ,PNPB_XHIF_ACYC_ISO_FREE_OBJ,PNPB_XHIF_ACYC_ISO_ACTIVATE_GPIO_OBJ,PNPB_XHIF_ACYC_HW_WATCHDOG_SET,PNPB_XHIF_ACYC_HW_WATCHDOG_COMMAND,PNPB_XHIF_ACYC_STORE_NEW_MAC,PNPB_XHIF_ACYC_STORE_NEW_IP,PNPB_XHIF_ACYC_STORE_NEW_DEVICE_NAME,PNPB_XHIF_ACYC_TRACE_COMMAND,PNPB_XHIF_ACYC_TRACE_SETTINGS,PNPB_XHIF_ACYC_READ_APDU_STATUS,PNPB_XHIF_ACYC_IM_WRITE_RSP,PNPB_XHIF_ACYC_IM_READ_RSP,PNPB_XHIF_ACYC_IM_READ_RSP_MORE_FOLLOWS,PNPB_XHIF_ACYC_TEST,/* To find out number of defined telegrams */PNPB_XHIF_ACYC_NUM_OF_TELEGRAMS
}PNPB_XHIF_ACYC_TELEGRAMS;
参考资料:
《Interface_Description_PN_IO_DevKits_V4.7.0.pdf》
《Guideline_EvalKit_ERTEC200P_V4.7.0.pdf》
这篇关于Profinet从站研究-西门子ERTEC 200P典型应用APP4解析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


