本文主要是介绍UART(Universal Asynchronous Receiver Transmitter:通用异步收发器),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
UART(Universal Asynchronous Receiver Transmitter:通用异步收发器)
UART协议虽然速率较低,但协议简单,实现起来很便捷。
UART有4个pin(VCC, GND, RX, TX), 用的TTL电平, 低电平为0(0V),高电平为1(3.3V或以上)。
COM口是我们台式机上面常用的口(下图),9个pin, 用的RS232电平, 它是负逻辑电平,它定义+5~+12V为低电平,而-12~-5V为高电平
如果与电脑连接,因为电脑是串口电平不同的单片机电平, 须要用到MAX232 进行电平转换
IO口对外,一般有 推拉方式 开漏式
串口,所谓串口就是一个移位寄存器。 数据-------》 缓冲器 ---》移位寄存器 移位寄存器-----》缓冲器
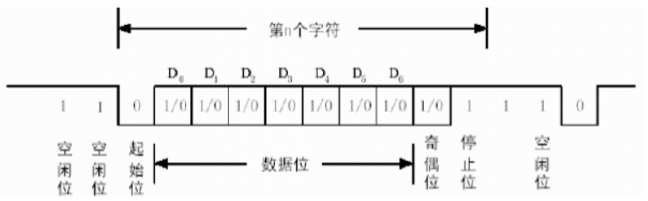
需要了解UART协议的几个参数,解释如下:
波特率:即每秒可以传输的码元个数
起始位:先发出一个逻辑”0”的信号,表示传输数据的开始。
数据位:可以选择的值有5,6,7,8这四个值,可以传输这么多个值为0或者1的bit位。这个参数最好为8,因为如果此值为其他的值时当你传输的是ASCII值时一般解析肯定会出问题。理由很简单,一个ASCII字符值为8位,如果一帧的数据位为7,那么还有一位就是不确定的值,这样就会出错。
校验位:数据位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验数据传送的正确性。就比如传输“A”(01000001)为例。
1、当为奇数校验:”A”字符的8个bit位中有两个1,那么奇偶校验位为1才能满足1的个数为奇数(奇校验)。
2、当为偶数校验:”A”字符的8个bit位中有两个1,那么奇偶校验位为0才能满足1的个数为偶数(偶校验)。
此位还可以去除,即不需要奇偶校验位。
停止位:它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率也就越慢。
空闲位:没有数据传输时线路上的电平状态。为逻辑1。
传输方向:即数据是从高位(MSB)开始传输还是从低位(LSB)开始传输。
这里配置以下:波特率115200,数据位8位,停止位1,无校验位
因为波特率为115200,因此码元宽度为1s/115200=8.68us
凌通MUC
UART 工作在主机模式下 void Usart_Init(void)
{SCON = 0x50; //Set UART as mode1 and enable reception.TMOD |= 0x20; //Initialize Timer1 as mode2.PCON = T1ovDiv2;TL1 = 0x75;TH1 = 0x75; //Set Baud rate as 115200 bps 0x8AES = 0; //Disable Uart Interrupt(Optional)TR1 = 1; //Start Timer1 Counter
}void usart_transmit(unsigned char dat)
{SBUF = dat; //Send 0xaa to TX.while(~TI); //Wait uart finishs transfer dataTI=0;
}void printf_uart(unsigned char *cstring)
{while((*cstring)!='\0'){usart_transmit(*cstring);cstring++;}
}8051f93XX--------------------------------------------------------------------
void UART0_Init (void)
{SCON0 = 0x10; // SCON0: 8-bit variable bit rate// level of STOP bit is ignored// RX enabled// ninth bits are zeros// clear RI0 and TI0 bits
-------------------------#if (SYSCLK/BAUDRATE/2/256 < 1) TH1 = -(SYSCLK/BAUDRATE/2);CKCON &= ~0x0B; // T1M = 1; SCA1:0 = xxCKCON |= 0x08;#elif (SYSCLK/BAUDRATE/2/256 < 4) TH1 = -(SYSCLK/BAUDRATE/2/4);CKCON &= ~0x0B; // T1M = 0; SCA1:0 = 01CKCON |= 0x01;#elif (SYSCLK/BAUDRATE/2/256 < 12) TH1 = -(SYSCLK/BAUDRATE/2/12);CKCON &= ~0x0B; // T1M = 0; SCA1:0 = 00#else TH1 = -(SYSCLK/BAUDRATE/2/48);CKCON &= ~0x0B; // T1M = 0; SCA1:0 = 10CKCON |= 0x02;#endif
-------------------------TL1 = TH1; // Init Timer1TMOD &= ~0xf0; // TMOD: timer 1 in 8-bit autoreloadTMOD |= 0x20;TR1 = 1; // START Timer1TI0 = 1; // Indicate TX0 ready
}//中断模式,一般中断模式都是作从机
//-----------------------------------------------------------------------------
// UART0_Interrupt
//-----------------------------------------------------------------------------
//
// This routine is invoked whenever a character is entered or displayed on the
// Hyperterminal.
//
//-----------------------------------------------------------------------------INTERRUPT(UART0_ISR, INTERRUPT_UART0)
{if (RI0 == 1){if( UART_Buffer_Size == 0) { // If new word is enteredUART_Input_First = 0; }RI0 = 0; // Clear interrupt flagByte = SBUF0; // Read a character from UARTif (UART_Buffer_Size < UART_BUFFERSIZE){UART_Buffer[UART_Input_First] = Byte; // Store in arrayUART_Buffer_Size++; // Update array's sizeUART_Input_First++; // Update counter}}if (TI0 == 1) // Check if transmit flag is set{TI0 = 0; // Clear interrupt flagif (UART_Buffer_Size != 1) // If buffer not empty{// If a new word is being outputif ( UART_Buffer_Size == UART_Input_First ) {UART_Output_First = 0; }// Store a character in the variable byteByte = UART_Buffer[UART_Output_First];if ((Byte >= 0x61) && (Byte <= 0x7A)) { // If upper case letterByte -= 32; }SBUF0 = Byte; // Transmit to HyperterminalUART_Output_First++; // Update counterUART_Buffer_Size--; // Decrease array size}else{UART_Buffer_Size = 0; // Set the array size to 0TX_Ready = 1; // Indicate transmission complete}}
}//-----------------------------------------------------------------------------
// putchar
//-----------------------------------------------------------------------------
//
// Return Value : None
// Parameters : character to send to UART
//
// This function outputs a character to the UART.
//-----------------------------------------------------------------------------
void putchar (char c)
{if (c == '\n'){while (!TI0);TI0 = 0;SBUF0 = 0x0d;}while (!TI0);TI0 = 0;SBUF0 = c;
}//-----------------------------------------------------------------------------
// getchar
//-----------------------------------------------------------------------------
//
// Return Value : character received from UART
// Parameters : None
//
// This function returns a character from the UART.
//-----------------------------------------------------------------------------
char getchar (void)
{char c;while (!RI0);c = SBUF0;RI0 = 0;return c;
}
这篇关于UART(Universal Asynchronous Receiver Transmitter:通用异步收发器)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



