本文主要是介绍汽车电子相关术语,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
SOA
SOA(Service-Oriented Architecture,面向服务的架构)是一种在计算机环境中设计、开发、部署和管理离散模型的方法。是由Garnter1996年提出的概念,将应用程序的不同功能单元(称为服务)进行拆分,并通过这些服务之间定义良好的接口和协议联系起来。接口是采用中立的方式进行定义的,目的是为了让软件变的有弹性,能够快速响应业务的需求,使开发人员以最小的软件变更应对迭代多变的需求
SOA基于以下概念:
系统由一组服务组成,其中一个服务可以依次使用另一个服务,应用程序可以根据其需要使用一个或多个服务。
服务可以驻留在应用程序运行的本地ECU上,也可以位于正在运行AP另一个实例的远程ECU上。
参考:soa是什么意思 • Worktile社区
QNX(Quantum Neutrino X)
QNX成立于1980年,是全世界第一个类UNIX的符合POSIX标准的微内核的影实时操作系统,广泛用于汽车、医疗设备和其他嵌入式系统中。它提供了一个高效的、可靠的平台,可以运行复杂的应用程序和控制系统
参考:选择Linux还是QNX - 知乎
QNX在汽车领域的基础软件操作系统地位以及深度的覆盖率-电子发烧友网
POSIX
可移植操作系统接口(Portable Operating System Interface of UNIX,缩写为 POSIX )
参考:posix是什么都不知道,还好意思说你懂Linux? - 知乎
Linux 黑话解释:什么是 POSIX? | Linux 中国 - 知乎
CPU(Central Processing Unit)
CPU是一台计算机的运算核心和控制核心。CPU由运算器、控制器和寄存器及实现它们之间联系的数据、控制及状态的总线构成。众所周知的三级流水线:取址、译码、执行的对象就是CPU,差不多所有的CPU的运作原理可分为四个阶段:提取(Fetch)、解码(Decode)、执行(Execute)和写回(Writeback)。 CPU从存储器或高速缓冲存储器中取出指令,放入指令寄存器,并对指令译码,并执行指令。所谓的计算机的可编程性主要是指对CPU的编程。
MMU(MemoryManagementUnit)
内存管理单元. 针对各种CPU, MMU是个可选的配件. MMU负责的是虚拟地址与物理地址的转换. 提供硬件机制的内存访问授权.(现代 CPU 的应用中,基本上都选择了使用 MMU)
参考:初探 MMU_爱洋葱的博客-CSDN博客
MPU (Micro Processor Unit)
MPU 叫微处理器(不是微控制器MCU,很多人会把微处理器和微控制器混淆),通常代表一个功能强大的CPU(暂且理解为增强版的CPU吧),但不是为任何已有的特定计算目的而设计的芯片。这种芯片往往是个人计算机和高端工作站的核心CPU。例如Intel 的X86,ARM的一些Cortex-A芯片如飞思卡尔i.MX6、全志A20、TI AM335X等都属于MPU。
MCU(Micro Control Unit)
MCU叫微控制器,其实就是我们平常说的单片机。是指随着大规模集成电路的出现及其发展,将计算机的CPU、RAM、ROM、定时计数器和多种I/O接口集成在一片芯片上,形成芯片级的芯片,比如51、STC、AVR、Cortex-M这些芯片,内部除了CPU外还有RAM、ROM,也就是在一块芯片中集成了整个计算机系统,可以直接加简单的外围器件(电阻,电容)就可以运行代码了。它本质上仍是一个完整的单片机,有处理器,有各种接口,所有的开发都是基于已经存在的系统架构,应用者要做的就是开发软件程序和加外部设备。而像ARM(Cortex-A系列)直接放代码是运行不了的,因为它本质上只是增强版的CPU,必须添加相应的RAM和ROM。
MCU和MPU的区别
MCU在一块芯片中集成了整个计算机系统,可以直接加简单的外围器件(电阻,电容)就可以运行代码了。它本质上仍是一个完整的单片机,有处理器,有各种接口,所有的开发都是基于已经存在的系统架构,应用者要做的就是开发软件程序和加外部设备。
MPU如ARM的Cortex-A系列,直接放代码是运行不了的,因为它本质上只是增强版的CPU,必须添加相应的RAM和ROM。
SoC(System on Chip)
SoC整体的一个电路系统,完成一个具体功能的东西:指的是片上系统,MPU只是芯片级的芯片,而SoC是系统级的芯片,它既MCU那样有内置RAM、ROM同时又像MPU那样强大,不单单是放简单的代码,可以放系统级的代码,也就是说可以运行操作系统(以Linux OS为主)(将就认为是MCU集成化与MPU强处理力各优点二合一)。
CPU与SoC的区别
SoC可以认为是将MCU集成化与MPU强处理力各优点二合一,其中MCU是CPU集成了各类外设,MPU是增强版的CPU。可以从下图中直观地看出CPU与SoC的区别。
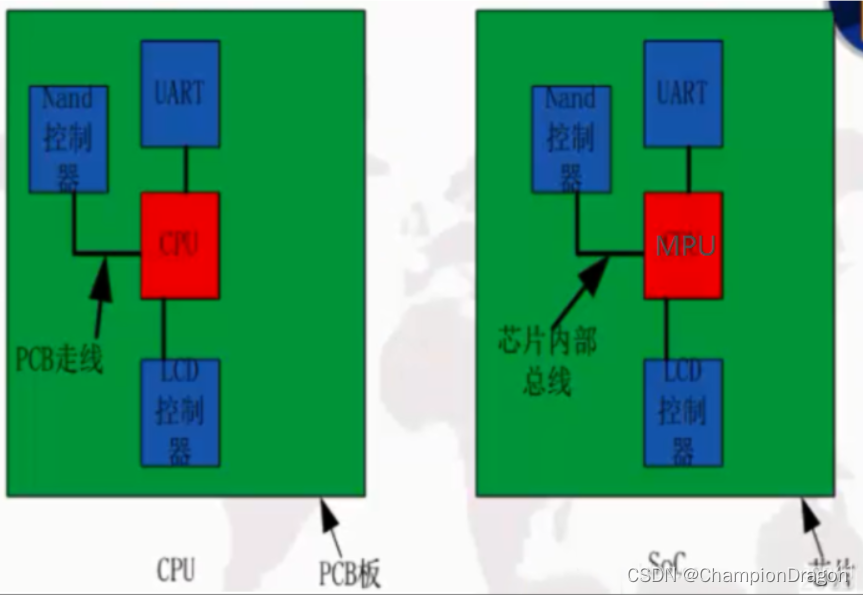
目前芯片的发展方向是从CPU到SoC,现在已经没有纯粹的CPU了,都是SoC。ARM出卖的内核其实就是CPU(当然还需要总线),各种外设是半导体厂商自己添加的。
SoPC(System On a Programmable Chip)
与上述几项概念相比,SoPC的出现频率并不是那么高,但这并不影响它的重要性。SOPC是System On a Programmable Chip的缩写,即 可编程片上系统,SoPC与MCU、MPU、SoC最明显的区别在于:可更改硬件配置,也就是说自己构造芯片。
举个例子说明便于理解,单片机的硬件配置是固化好了的, 我们能够编程修改的就是软件配置,本来是串口通信功能,通过修改代码变成AD采样功能,也就是说硬件配置是固定了的,我们只能通过修改软件来选择其中的一项或多项功能;而SoPC可以修改硬件配置信息使其成为相应的芯片,可以是MCU,也可以是SoC。
SoPC与MCU、MPU、SoC的区别
SoPC与MCU、MPU、SoC最明显的区别在于:可更改硬件配置,也就是说自己构造芯片。
举个例子说明便于理解,单片机的硬件配置是固化好了的, 我们能够编程修改的就是软件配置,本来是串口通信功能,通过修改代码变成AD采样功能,也就是说硬件配置是固定了的,我们只能通过修改软件来选择其中的一项或多项功能;而SoPC可以修改硬件配置信息使其成为相应的芯片,可以是MCU,也可以是SoC。
ECU
电控单元(ECU)是发动机的综合控制装置。它的功用是根据自身存储的程序对发动机各传感器输入的各种信息进行运算、处理、判断、然后输出指令,控制有关执行器动作,达到快速、准确、自动控制发动机工作的目的。
高级驾驶辅助系统(Advanced Driving Assistance System)
是利用安装在车上的各式各样传感器(毫米波雷达、激光雷达、单\双目摄像头以及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
TBOX (Telemastic Box)
汽车T-box主要用于与后台系统/移动应用进行通信,实现对移动应用的车辆信息显示和控制。用户通过移动应用发送控制命令后,TSP(Telematics Service Provider/远程信息服务提供商)后台
会向汽车T-box发送监控请求命令,此功能可以帮助用户远程启动车辆、打开空调、将座椅调整到适当位置等。
原理:
汽车T-BOX通过CAN总线与主机通信,实现指令和信息的传输,包括车辆状态信息、钥匙状态信息、控制指令等;通过音频连接,双方可以共享麦克风和扬声器输出。ACC关闭后,为了确保汽车T-BOX的工作电流较低,通信模块将断开数据链路,只保留短信接收和电话输入功能。
作用:
T-box分为7种工作状态,每个状态由B+、ACC、通信(呼叫、数据、短信)、GPS和can的不同状态表示。T-box可以深入读取汽车can总线数据和专用协议。T-box终端具有双核处理OBD模块和双核处理CPU架构,它分别采集与汽车总线DCan、kcan和ptcan相关的总线数据和专用协议反向控制。
缩略语
Hypervisor 智能汽车虚拟化
OTA 在线升级服务
RDS(Remote Diagnostic Service) 远程诊断服务/模块
UDS(Unifiled Diagnostic Service) 统一诊断服务
CDN(Content Delivery NetWork) 内容分发网络
Master OTA OTA主控程序
Sub OTA (简称SubDA或Sub) OTA子控程序
SMI (Sub-Master Interactive) Master主控与Sub子控交互模块
VCI (Vehicle-Cloud Interactive) 车云交互模块
HMI (Human Machine Interface) 人机交互模块
MU (Master Unit) 逻辑主控模块
DU (Download Upload Unit) 下载上传模块
UU (Update Unit) 升级刷写模块
PU (Patch Unit) 差分还原模块
UA (Update Agent) 升级代理
IA (Interface Agent) 接口代理
ECU (Electrical Control Unit) 电子控制单元
TBOX (Telemastic Box) 车载远程监控终端
IVI (In-Vehicle Infotainment) 车载主机
IC (Instrument Cluster) 智能仪表
RPC (Remote Procedure Call) 进程间远程过程调用
API (Application Programming Interface) 应用程序编程接口
FTP (File Transfer Protocol) 文件传输协议
HTTP (Hypertext Transfer Protocol) 超文本传输协议
HTTPS (Hypertext Transfer Protocol Secure) 超文本传输安全协议
MQTT(Message Queuing Telemetry Transport) 消息队列遥测传输协议
MQTTS(Message Queuing Telemetry Transport Secure) 消息队列遥测传输安全协议
PKI (Public Key Infrastructure) 公钥基础设施
WS(WebSocket) 一种基于HTTP在单个TCP连接上实现全双工通信的协议
WSS (WebSocket Secure) WebSocket安全协议
CAN (Controller Area Network) 汽车控制器局域网
CAN总线有动力总成PCAN,底盘控制CCAN,整车控制BCAN,娱乐ECAN,诊断DCAN五种。
CAN UA 基于CAN总线的ECU刷写代理模块
TBox UA TBox升级代理模块
IVI UA IVI升级代理模块
IC UA IC升级代理模块
DoIP (Diagnostic communication over Internet Protocol) 基于IP网络的诊断协议
DoIP UA TBox升级程序
IVI Updater IVI升级程序
IC Updater IC升级程序
Master Interface 主控程序接口
Master IA 主控程序接口代理
Sub IA 子控程序接口代理
LIN(Local Interconnect Network)也是一种通信协议,但它通常用于连接低速率和简单控制设备,比如窗户升降、后视镜调节等
HAD(Autonomous Vehicle, Self-driving car) 自动驾驶汽车
是不需要驾驶员亲自操作,汽车自主识别行驶环境来判断危险情况、规划行驶路径,将驾驶员的操作频率降到最低,并能够自主安全行驶的汽车。L0到L2称为ADAS辅助驾驶,L3及以上称为AD自动驾驶,中间为L2+
ADCU(Autonomous Driving Control Unit) 自动驾驶域控制器
作为一个智能计算平台,面向L3~L5级无人驾驶应用,它能 够将计算密集型传感器数据处理和传感器融合工作与控制策略开发集成到一个控制单元中,并有助于建立结构化和有组织的 车辆控制器网络。可以用于无人物流配送、无人环卫、无人矿车、无人巴士、智能工程机械等应用领域。
OSEK(open systems and the corresponding interfaces for automotive electronics) 德国的汽车电子类开放系统和对应接口标准
VDX (vehicle distributed executive)汽车分布式执行标准
OSEK/VDX是应用在模块和静态实时操作系统上的标准,由主要的汽车制造商和供应商,研究机构以及软件开发商发起
ESC(Electronic-Stability-Controller) 车身电子稳定控制系统
它是一种辅助驾驶者控制车辆的主动安全技术,同时也是汽车防抱死制动系统和牵引力控制系统功能的进一步扩展,在ESC上可以看到ABS和TCS功能的影子,可以说是目前车辆安全电子设备的集大成者。
STM32 ST公司基于ARM Cortex-M内核开发的32位微控制器
Flexray 一种优于CAN的通讯模式
CDC(Cockpit Domain Controller) 座舱域控制器 将多个不同操作系统和安全级别的功能融合到一个平台上,以高集成、高性能、高扩展性等方面的优势满足车主的个性化需求智能座舱域包括HUD、仪表盘和车载娱乐信息系统(In-Vehicle Infotainment,简称IVI)三个最主要的组成部分
HUD(Head Up Display) 抬头显示/平视显示系统
是指以车辆驾驶员为中心、盲操作、多功能仪表盘。它的作用,就是把时速、导航等重要的行车信息,投影到驾驶员前面的风挡玻璃上,让驾驶员尽量做到不低头、不转头就能看到时速、导航等重要的驾驶信息
这篇关于汽车电子相关术语的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






