本文主要是介绍对K,要不起,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
KNN算法是一种分类算法,和Kmeans是看起来像但可以说没啥关系。KNN的数据集都是带label的(监督学习),整个分类过程类似于一种投票机制。
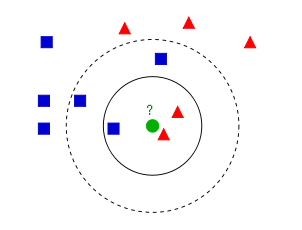
这里KNN的K指的是当我们给样本x分类的时候,我们就从数据集里找跟x距离最近的k个数据点,然后选k个数据点中类别最多的类给x。比如上图:k的取值是能直接决定分类效果的,当k取3时,绿点应被归为红三角(2 >1);当k取5是,绿点又被归为蓝方块(3>2)
KNN没有明显的训练过程,是一种基于记忆的学习。它和Kmeans唯一的共同点可能就是都用到了NN(Nears Neighbor)算法,NN的实现一般使用KD(K-dimension tree)树。既然提到了kd树,我们就继续聊聊它吧。
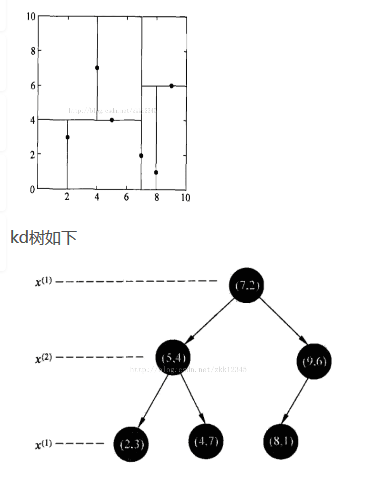
kd树是数据点对k维空间中划分的一种数据结构,主要应用在多维空间数据搜索(如范围搜索和最邻近搜索)。本质上说kd树是一种平衡二叉树。我们以一个例子说明kd树的构建:
给定一个二维空间的数据集T= {(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)}
首先在k维空间某一特征(这里选择第一个特征说明)-->{2,5,9,4,8,7},一般取中点来确定超平面(虽然并不是在任何情况下都是最佳),偶数的话选中间靠后的点,即x(1) = 7,然后分成左右两部分{(2,3),(4,7),(5,4)}和{(8,1),(9,6)};再以第二个特征为准确定超平面,左部分x(2) = 4,以此类推,kd树构建完成:
接着介绍一下在kd树上进行邻近搜索:
比如现在的目标点是(6,1)
1. 通过DFS,在kd树中找到目标点所在的叶节点。
2. 以该叶节点作为当前NN(最邻近)点,计算该节点与目标点之间的距离作为当前的最小距离,这里用欧氏距离。
3. 计算该叶节点父节点到目标点的距离,若小于当前距离,更新最短距离,同时记录之前的NN点。
4. 决定是否进入父节点的另一个子节点:
a) 即第三步的计算结果,如果大,说明没必要继续看其另一边的子树了,以此父节点视为叶节点,重复步骤3。
b) 若小,则进入另一个子节点,重复步骤1,确定另一棵子树中目标点应该在的新叶节点,判断是否更新NN点,接着以此叶节点开始重复步骤3。
以此类推,可以看出整个搜索过程是不断向根节点回退的,回退过程中已经进入过得不再进入。
5. 当退到根节点的时候,此时的NN点即目标点的最邻近点,若求k可以从保存下来的NN点中选择。
Kmeans算法算是一种非常常见而且使用广泛的聚类算法了。它能把样本对象根据各自属性分成K个聚类,如图所示:
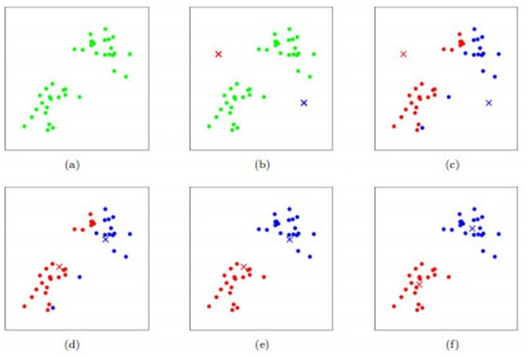
这里K取值为2,Kmeans算法流程就是先初始化k个簇的中心点,根据各点到其距离远近分成K类,接着更新每个簇的中心(即把该簇的所有样本数据坐标相加取平均值),这样不断迭代直至每个簇的中心点不再变化。
Keans因为用到NN,所以也有用到kd树,kmeans把每次更新的簇中心点存成kd树,然后其余的样本点在树中寻找最邻近点确定自己所在的类。
最后总结一下两种算法的异同:
1. KNN是监督的分类算法,Kmeans是无监督的聚类算法。
2. KNN的数据集是带label的,Kmeans则不带。
3. 都有一个给目标点寻找最邻近点的过程,也都用距离相似度来衡量,NN也都用kd树实现。
这篇关于对K,要不起的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!