本文主要是介绍西门子产线整周实训总结(工位二) 2021-01-14,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
西门子产线整周实训总结(工位二)
实训内容概述:

通过XYZ三轴机械手完成搬运动作。详见下视频
《假装有视频》
课程安排:
课程共24学时,周一和周四是整天,周二和周三是半天。

第一天(全天):
1、上课前播放5分钟舒伯特药品包装线视频,给学生一个实际产线的直观印象。
2、讲解521实验室产线整体流程。

3、第二工位功能详细讲解。

4、第二工位电路图读图
先概略的讲10分钟,然后让同学们带着问题去看图30分钟,再详细的讲一节课。最后在黑板上画出后面编程要用的急停信号、X轴、Y轴和Z轴的原位和限位信号的IO分配表。
第一天经验:
- 首先简单介绍下读图方法,包括(1)从第39页主电路开始看。(2)电气标号的规律。(3)如何利用PDF软件的查找功能,如全词匹配。
- 不要仅仅说给同学们40分钟,让他们自己看,第一节课大部分同学都没进入状态,很多同学这40分钟就浪费了,要设计一些问题,让学生带着问题去看。
- 我在读图前,会设计以下问题:急停信号、X轴、Y轴和Z轴的原位和限位信号分别接到PLC的哪些输入点?
- 后续考虑加大难度,将门开关、三色灯、传送带等信号的IO分配加上。
5、第一天最后两个课时,开始软件教学,首先进行组态配置。
(1)添加设备,提前把以下设备信息和配置要点截图发给同学们。
-
PLC:西门子S1500

-
HMI:西门子KTP700

-
伺服:西门子V90

-
软件:博图V15
-
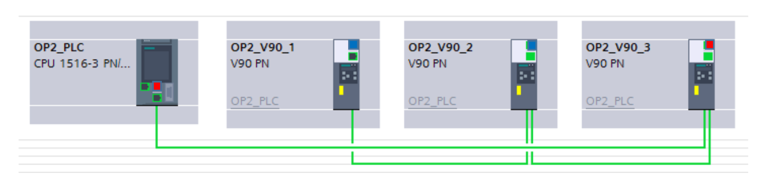
组态网络视图

-
组态拓扑视图
-
V90循环数据交换
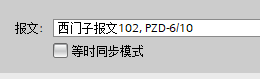
-
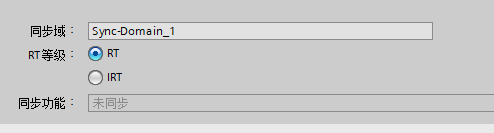
V90同步
(2)建立变量表,把电气识图IO分配的限位和急停信号加进去。

(3)新建X轴工艺对象,重点强调位置限制和回零两部分。

(4)建立X轴控制FC块,只添加使能(Power)模块和对应的使能HMI按钮,然后让每组都编译下载,在第二工位亲自操作一下,通过观察V90伺服的指示灯,来判断是否网络配置正确,是否使能正确。
第一天经验:
- 第一天基本充实的完成此任务。第一天的工作很重要,可以保证组态网络配置正确。每一组都学会了组态配置、X轴工艺对象的建立,为后面增加程序打下基础。
- 一定要让学生学会归档保存,第二天的工作在第一天基础上进行。第一天结束后,要总结下今天的内容,引出第二天的内容。
- 但是会出现一个情况,第一组做完和最后一组可能间隔1个小时,这1个小时,如何给先做完的安排工作,是值得思考的。
第二天(半天):
(1)播放食品包装产线的视频。
(2)回顾第一天的内容,引出第二天的内容(在昨天power块的基础上增加其他几个块)。
(3)带领同学们完成X轴单独控制PLC程序和HMI程序。
(4)每组都要把X轴单独程序进行调试。
第二天经验:
- 第二天只有半天,在第一天网络配置OK的情况下,第二天的内容也并不难,全部9组同学都完成了X轴使能、点动、绝对定位、回零、暂停和复位的功能。
- 在同学们上机试前,要重点检查X轴工艺对象的限位和回零配置,以及限位和回零速度的设置。只要这两个正确,并且Z轴位置不是很靠下,就不会出现安全问题。
- 在上机时,教师要先操作,并讲解每个按钮的含义,尤其是回零和限位开关的作用。
- 总结上午的工作,引出第三天上午的工作,让同学们自主完成Y轴和Z轴的单轴控制。
第三天(半天):
(1)播放包装产线的视频和ABB的YUMI机器人包装的视频,讲解非标自动化的优势。
(2)总结一下X轴独立控制的几个关键步骤,包括:建立工艺对象、建立FC块、DB变量表、用到哪些功能块,尤其是回零Mode=3.
(3)强调Y轴和X轴的配置类似,但是Z轴的工艺对象里面在限位和回零处要有不同处理,以及Z轴电机抱闸的配置。
(4)让同学们开始自主编写Y轴和Z轴的程序,并让他们自己上机操作。
以上4步,前2~3个课时可以完成。
(5)最后1个课时,开始讲解三轴联动的原理,首先讲解线圈复用的原理。
(6)讲解基于逻辑步的编程思路。

(7)带领同学们编到逻辑的第4步即可。强调每一个步骤开始和结束条件是什么。给出取放料位置值。

(8)让同学们开始自己编XYZ三轴运动的程序。有些基础好的同学,可以在第三天就完成三轴联动任务。
第三天经验:
- 总结XYZ联动的要点:三轴如何同时使能、每个步骤结束的标志、最后一步的循环、停止功能要加进去。
- 有一组在第三天就完成了三轴联动,以后考虑增加一点难度的,让先完成的同学可以进阶练习。
- 跟着我做的时候,同学们基本都能一遍过,证明大家听懂了。但是自己写Y和Z时,就会碰到问题,大部分是不够认真导致,通过在线调试都可以排除,问题总结如下:
- DB块重复,直接复制X轴的FC导致
- 画面变量关联错,直接复制X轴的画面导致
- Y轴和Z轴的工艺对象还是配置错
- 没配置Z轴电机抱闸
- 回零没选模式3
- 根画面下载出错
- 没有选总程序就点击下载,只下载了部分程序
- 画面跳转,没有选单击或者按下,而选了激活
第四天(全天):
(1)播放搜集的产线视频
(2)总结昨天的XYZ单轴控制工作和三轴联动编程思路,再次强调线圈复用的要点
(3)检查已做完同学程序
第四天经验:
- 第四天上午非常忙碌,每组都要检查。但是在单轴都正常运行的基础上,就可以保证不会出安全问题。注意Z轴的高度。
- 网线够长,可以插到每个同学电脑下载检查。
- 同学们三轴联动的问题主要有:
- 回零DONE和绝对定位DONE搞错。
- 单独使能和同时使能搞错
- 停止功能没加或弄错
- 线圈复用问题,
- 有些同学用置位和复位来应付线圈复用,但是不熟练,导致逻辑出错。
整周总结:
- 循序渐进的任务安排:识图(找到IO分配)–>使能上机验证(网络配置正确)–>X轴单轴运动(学会函数块)–>XYZ单轴(学生第一次自主编程和上机)—>三轴联动示范前4步(引导思路和关键点)—>三轴联动自主编程和上机试验(和同学们一起发现问题、解决问题,让同学们有成就感)
- 第一天的工作很重要,可以保证组态正确。后面程序就不会出现网络配置、PLC等设备名字错误、IP地址错误这类莫名其妙的故障了。
- 安全问题,只要设置好XYZ三轴工艺的限位和回零,以及确保Z轴不要太靠下的情况下,不会出现撞击事故,可以放心让同学们自主调试。
- 每节课前,可以播放精心挑选的3~5分钟自动化产线的视频,提起同学们的兴趣。
- 由于分组比较多(9~10组),第一组做完和最后一组做完会有较大时间间隔,如何分阶梯设置难度,是本课程下一步重点。
- 同学们的出勤率都可以,但是每组3~4个人,在每组中都有1个挑大梁的同学,和2 ~3个玩手机的同学,基本最后都是这10名同学左右在全程参与,如何调动每个同学的积极性,让能力强和弱的同学都有收获?
这篇关于西门子产线整周实训总结(工位二) 2021-01-14的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




