本文主要是介绍STM32cubeMX开发 NANDflash 之H27U4G8F2E 问题记录,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
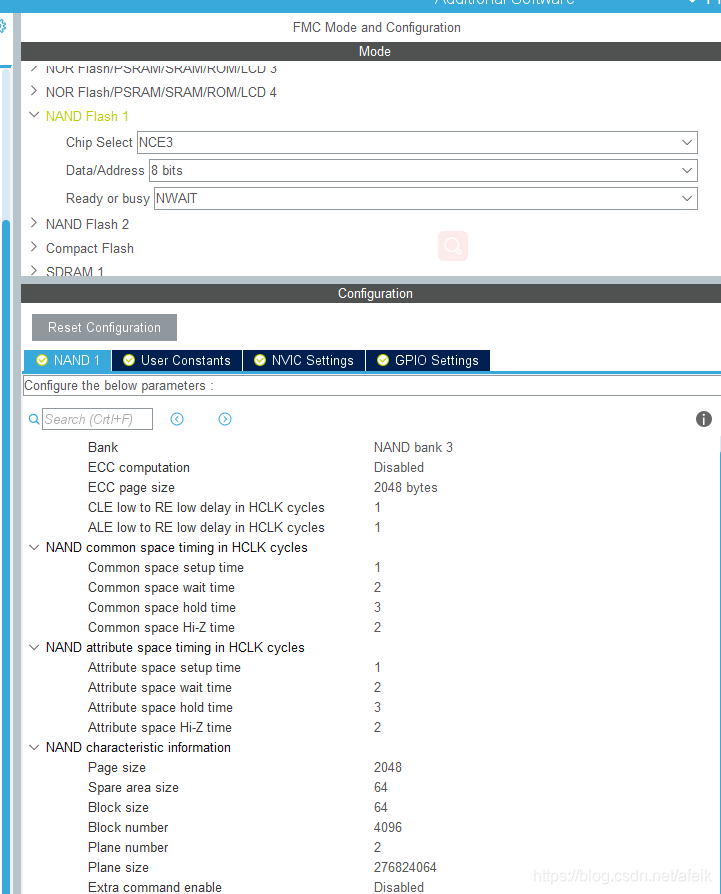
stm32cubemx配置
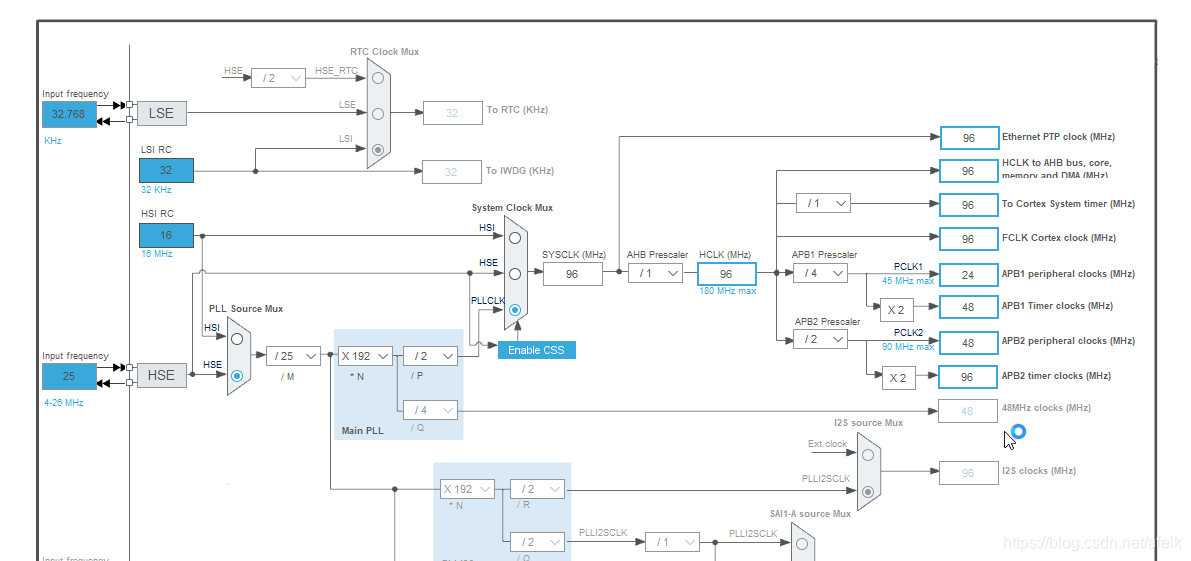
时钟配置
代码部分
/********************************************************************************* File Name : FMC.c* Description : This file provides code for the configuration* of the FMC peripheral.******************************************************************************* @attention** <h2><center>© Copyright (c) 2020 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************//* Includes ------------------------------------------------------------------*/
#include "fmc.h"/* USER CODE BEGIN 0 *//* USER CODE END 0 */NAND_HandleTypeDef hnand1;/* FMC initialization function */
void MX_FMC_Init(void)
{FMC_NAND_PCC_TimingTypeDef ComSpaceTiming = {0};FMC_NAND_PCC_TimingTypeDef AttSpaceTiming = {0};/** Perform the NAND1 memory initialization sequence*/hnand1.Instance = FMC_NAND_DEVICE;/* hnand1.Init */hnand1.Init.NandBank = FMC_NAND_BANK3;hnand1.Init.Waitfeature = FMC_NAND_PCC_WAIT_FEATURE_ENABLE;hnand1.Init.MemoryDataWidth = FMC_NAND_PCC_MEM_BUS_WIDTH_8;hnand1.Init.EccComputation = FMC_NAND_ECC_DISABLE;hnand1.Init.ECCPageSize = FMC_NAND_ECC_PAGE_SIZE_2048BYTE;hnand1.Init.TCLRSetupTime = 0;hnand1.Init.TARSetupTime = 0;/* hnand1.Config */hnand1.Config.PageSize = 2048;hnand1.Config.SpareAreaSize = 64;hnand1.Config.BlockSize = 64;hnand1.Config.BlockNbr = 4096;hnand1.Config.PlaneNbr = 2;hnand1.Config.PlaneSize = 276824064;hnand1.Config.ExtraCommandEnable = DISABLE;/* ComSpaceTiming */ComSpaceTiming.SetupTime = 0;ComSpaceTiming.WaitSetupTime = 1;ComSpaceTiming.HoldSetupTime = 3;ComSpaceTiming.HiZSetupTime = 1;/* AttSpaceTiming */AttSpaceTiming.SetupTime = 0;AttSpaceTiming.WaitSetupTime = 1;AttSpaceTiming.HoldSetupTime = 3;AttSpaceTiming.HiZSetupTime = 1;if (HAL_NAND_Init(&hnand1, &ComSpaceTiming, &AttSpaceTiming) != HAL_OK){Error_Handler( );}}static uint32_t FMC_Initialized = 0;static void HAL_FMC_MspInit(void){/* USER CODE BEGIN FMC_MspInit 0 *//* USER CODE END FMC_MspInit 0 */GPIO_InitTypeDef GPIO_InitStruct = {0};if (FMC_Initialized) {return;}FMC_Initialized = 1;/* Peripheral clock enable */__HAL_RCC_FMC_CLK_ENABLE();/** FMC GPIO Configuration PE7 ------> FMC_D4PE8 ------> FMC_D5PE9 ------> FMC_D6PE10 ------> FMC_D7PD11 ------> FMC_CLEPD12 ------> FMC_ALEPD14 ------> FMC_D0PD15 ------> FMC_D1PD0 ------> FMC_D2PD1 ------> FMC_D3PD4 ------> FMC_NOEPD5 ------> FMC_NWEPD6 ------> FMC_NWAITPG9 ------> FMC_NCE3*//* GPIO_InitStruct */GPIO_InitStruct.Pin = GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;GPIO_InitStruct.Alternate = GPIO_AF12_FMC;HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);/* GPIO_InitStruct */GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_12|GPIO_PIN_14|GPIO_PIN_15 |GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_4|GPIO_PIN_5 |GPIO_PIN_6;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;GPIO_InitStruct.Alternate = GPIO_AF12_FMC;HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);/* GPIO_InitStruct */GPIO_InitStruct.Pin = GPIO_PIN_9;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;GPIO_InitStruct.Alternate = GPIO_AF12_FMC;HAL_GPIO_Init(GPIOG, &GPIO_InitStruct);/* USER CODE BEGIN FMC_MspInit 1 *//* USER CODE END FMC_MspInit 1 */
}void HAL_NAND_MspInit(NAND_HandleTypeDef* nandHandle){/* USER CODE BEGIN NAND_MspInit 0 *//* USER CODE END NAND_MspInit 0 */HAL_FMC_MspInit();/* USER CODE BEGIN NAND_MspInit 1 *//* USER CODE END NAND_MspInit 1 */
}static uint32_t FMC_DeInitialized = 0;static void HAL_FMC_MspDeInit(void){/* USER CODE BEGIN FMC_MspDeInit 0 *//* USER CODE END FMC_MspDeInit 0 */if (FMC_DeInitialized) {return;}FMC_DeInitialized = 1;/* Peripheral clock enable */__HAL_RCC_FMC_CLK_DISABLE();/** FMC GPIO Configuration PE7 ------> FMC_D4PE8 ------> FMC_D5PE9 ------> FMC_D6PE10 ------> FMC_D7PD11 ------> FMC_CLEPD12 ------> FMC_ALEPD14 ------> FMC_D0PD15 ------> FMC_D1PD0 ------> FMC_D2PD1 ------> FMC_D3PD4 ------> FMC_NOEPD5 ------> FMC_NWEPD6 ------> FMC_NWAITPG9 ------> FMC_NCE3*/HAL_GPIO_DeInit(GPIOE, GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10);HAL_GPIO_DeInit(GPIOD, GPIO_PIN_11|GPIO_PIN_12|GPIO_PIN_14|GPIO_PIN_15 |GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_4|GPIO_PIN_5 |GPIO_PIN_6);HAL_GPIO_DeInit(GPIOG, GPIO_PIN_9);/* USER CODE BEGIN FMC_MspDeInit 1 *//* USER CODE END FMC_MspDeInit 1 */
}void HAL_NAND_MspDeInit(NAND_HandleTypeDef* nandHandle){/* USER CODE BEGIN NAND_MspDeInit 0 *//* USER CODE END NAND_MspDeInit 0 */HAL_FMC_MspDeInit();/* USER CODE BEGIN NAND_MspDeInit 1 *//* USER CODE END NAND_MspDeInit 1 */
}
/*** @}*//*** @}*//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2020 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header *//* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include "fmc.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */#include "nandflash.h"/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_FMC_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */HAL_Delay (500);if(nandflash())HAL_UART_Transmit(&huart1,"read nandflash failed",sizeof("read nandflash failed"),100);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage */__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);/** Initializes the CPU, AHB and APB busses clocks */RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 25;RCC_OscInitStruct.PLL.PLLN = 192;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = 4;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB busses clocks */RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state *//* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{ /* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
#include "fmc.h"
#include "usart.h"NAND_IDTypeDef nand_ID;
NAND_AddressTypeDef NAND_Address;void nand_init(uint8_t nPlane,uint16_t nBlock,uint8_t nPage)
{assert_param(IS_nPLANE_OK(nPlane));assert_param(IS_nBLOCK_OK(nBlock));assert_param(IS_nPAGE_OK(nPage));NAND_Address.Plane = nPlane;NAND_Address.Block = nBlock;NAND_Address.Page = nPage;
}uint8_t nandflash()
{HAL_StatusTypeDef HAL_status;uint8_t read_result[2048] = "0";HAL_NAND_Reset(&hnand1);HAL_Delay (500);HAL_status = HAL_NAND_Read_ID(&hnand1,&nand_ID);if(HAL_status != HAL_OK)return 1;HAL_UART_Transmit(&huart1,&nand_ID.Device_Id,sizeof(uint8_t),100);HAL_UART_Transmit(&huart1,&nand_ID.Fourth_Id,sizeof(uint8_t),100);HAL_UART_Transmit(&huart1,&nand_ID.Maker_Id,sizeof(uint8_t),100);HAL_UART_Transmit(&huart1,&nand_ID.Third_Id,sizeof(uint8_t),100);nand_init(1,1,1);HAL_status = HAL_NAND_Read_Page_8b(&hnand1,&NAND_Address,read_result,1);if(HAL_status != HAL_OK)return 3;HAL_UART_Transmit(&huart1,read_result,sizeof(read_result),3000);if(HAL_status != HAL_OK)return 4;return 0;
}问题:调试时总是卡在
HAL_status = HAL_NAND_Read_ID(&hnand1,&nand_ID);这个库函数中
data = *(__IO uint32_t *)deviceaddress;/* Return the data read */一执行这一步,就报错
这篇关于STM32cubeMX开发 NANDflash 之H27U4G8F2E 问题记录的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







