本文主要是介绍DJI M300RTK + Manifold 2 开发实例,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
DJI M300RTK + Manifold 2 开发实例
本文记录利用DJI M300RTK + Manifold 2C/G 的开发过程,供学习交流使用。
文章目录
- DJI M300RTK + Manifold 2 开发实例
- 前言
- 1、固件升级
- 2、启用OSDK 控制功能
- 3、使用模拟器
- 一、配制开发环境
- 1.安装开发工具
- 2.安装依赖软件
- 3. 添加设备权限
- 4.设置波特率
- 二、设备连接
- 1.使用M300 RTK 无人机
- 2.连接M300 RTK 无人机与Manifold2
- 三、运行示例程序
- 1.获取示例代码
- 2.创建应用程序
- 3.运行Linux 示例代码
- 4.运行ROS示例代码
- 四、Debug
- 1.无人机无法连接
前言
开发M300需要准备:安装DJI Assistant2 的windows计算机,用于进行飞行模拟。支持OSDK开发的Ubuntu系统计算机,我们这里采用DJI Manifold 2。
1、固件升级
使用OSDK 开发应用程序时,需先使用DJI Assistant2 升级无人机的固件至最新版本。
2、启用OSDK 控制功能
为使基于OSDK 开发的程序能够与飞行平台间正常通信,需在DJI Assistant2 中启用OSDK API 控制功能,包括波特率。
3、使用模拟器
M300 RTK 支持开发者使用DJI Assistant 2 中的模拟器模拟基于OSDK 开发的应用程序。
一、配制开发环境
参考 大疆官方教程 :https://developer.dji.com/cn/onboard-sdk/documentation/quickstart/device-connection.html
注:本文只对配置ROS环境进行介绍 !!,参考官网教程做了实测。
1.安装开发工具
这里采用的Manifold2-C机载计算机自带GCC、G++、CMake和ROS,无需格外安装。
这里,我们通过如下命令创建了名为 M300_ws 的工作空间。
mkdir M300_ws
cd M300_ws
mkdir src
cd src
catkin_init_workspace
2.安装依赖软件
(1) 安装DJI Onboard SDK
从Github上获取DJI Onboard SDK功能包,将此功能包放置在/M300_ws/src目录下,并在功能包目录下使用如下命令安装DJI Onboard SDK。
$mkdir build $cd build $cmake .. $sudo make -j7 install
(2) 安装nema-comms(用于高级视觉)
使用如下命令安装nema-comms
$sudo apt install ros-{release}-nmea-comms
注:在Manifold2-C上使用此命令404了,可能是软件源问题,于是从网站直接下载包,使用命令
sudo dpkg -i xxx.deb安装。包在这里
(3) 安装ACM 驱动
安装ACM(Abstract Control Model)驱动后,开发者使用机载计算机或第三方开发平台通过USB 接口能够实现应用程序仿真和外部供电功能。使用dmesg 命令可查询系统中ACM 驱动的信息。
注:暂未安装。
(4) 安装FFmpeg
安装FFmpeg 后,开发者使用机载计算机或第三方开发平台能够实现视频相关功能。
请使用如下命令安装FFmpeg:
sudo apt-get install libavcodec-dev libswresample-dev
注:Manifold2-C自带,无需再次安装。
(5) 安装OpenCV 3.x
安装OpenCV 后,开发者使用机载计算机或第三方开发平台能够以可视化的方式获取立体感知及对象识别等应用功能的信息。
注:Manifold2-C自带OpenCV,无需再次安装。
3. 添加设备权限
(1) 添加UART 读写权限
请按如下步骤为Linux 中指定的用户添加UART 读写权限:
- 使用
sudo usermod -a -G dialout $USER命令将用户添加至dialout 组中。 - 重新登录所添加的账户后,该账户即可获取UART 读写权限。
(2) 安装LibUSB 并添加DJI USB 设备节点
- 安装LibUSB
安装LibUSB 后,开发者使用Manifold 和第三方开发平台能够获取无人机接收到的图像数据。
使用如下命令安装LibUSB:1.0.17及更高版本。
sudo apt-get install libusb-1.0-0-dev
- 添加DJI USB 设备节点
如需在M300 系列的无人机上使用OSDK 中的视觉功能,使Linux 系统能够获取并标识DJI 的设备,参考这里,按如下步骤,在Linux 中添加DJI USB 设备节点:
在/etc/udev/rules.d/目录下创建文件DJIDevice.rules。
sudo gedit /etc/udev/rules.d/DJIDevice.rules
在DJIDevice.rules文件中添加:
SUBSYSTEM=="usb",
ATTRS{idVendor}=="2ca3",
ATTRS{idProduct}=="001f",
MODE="0666",
SYMLINK+="visionM300"
加载规则:
sudo udevadm control --reload
重新启动电脑后,系统即可识别DJI USB 设备。
4.设置波特率
ROS 默认订阅的主题相对较多,为保证ROS 与基于OSDK 开发的应用程序间有足够的通信带宽,UART 的波特率应大于921600。
二、设备连接
1.使用M300 RTK 无人机
几点说明:
- 无人机M300 RTK 与OSDK 转接板串口的电压均为3.3 V;
- 在Matrice 300 RTK无人机上安装Manifold 2 或第三方开发平台时,请使用OSDK 转接板;
- 使用第三方平台为机载计算机时,请避免产生磁场,干扰无人机的正常工作。
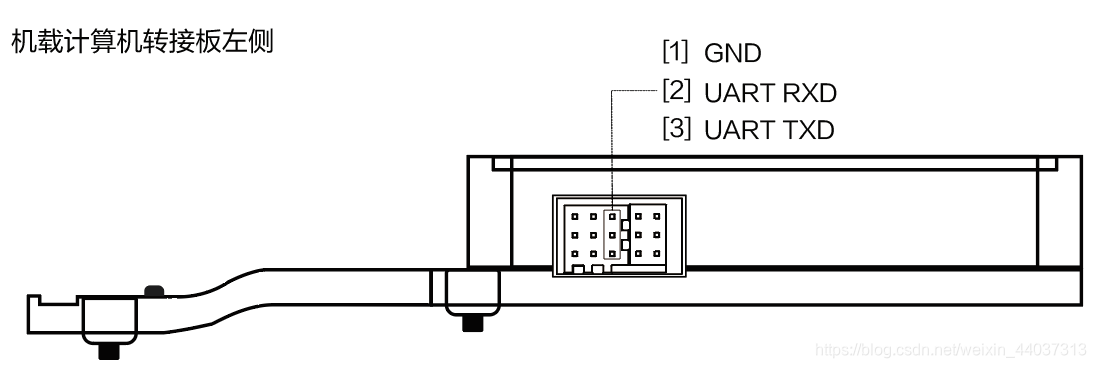
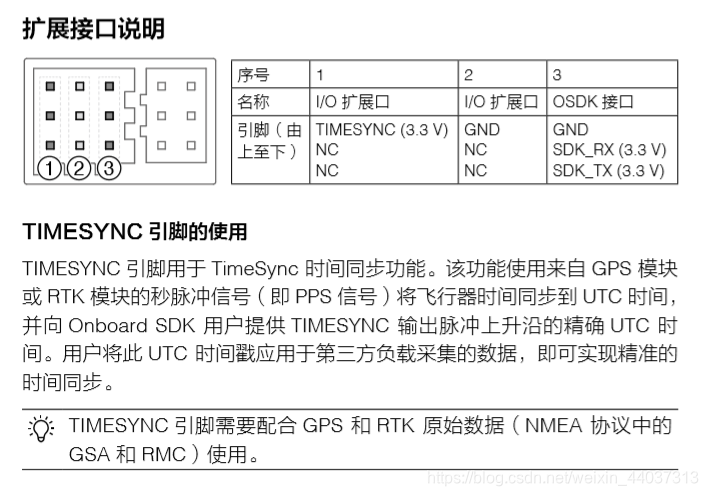
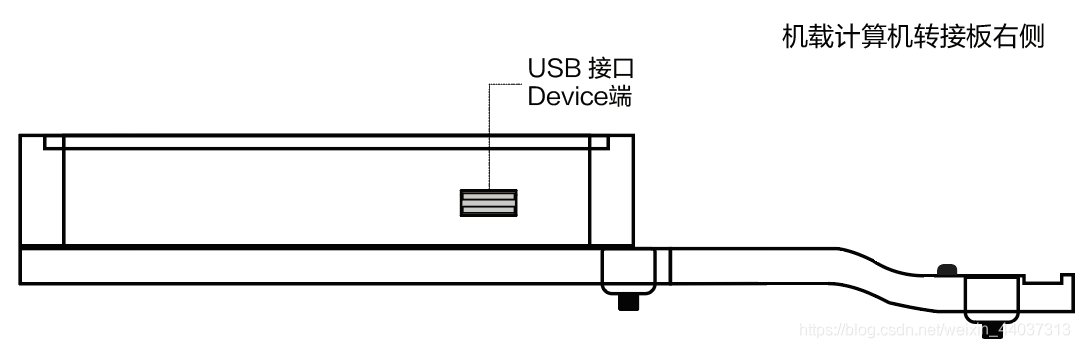
为方便开发者将机载计算机Manifold 2 或第三方计算平台固定在M300 RTK 的无人机上,DJI 提供了机载计算机转接板,该转接板提供了XT30 24V 供电接口、OSDK串口以及OSDK USB 2.0 接口,开发者可根据转接板的结构和接口,设计所需使用的机载计算机或其他设备。图1为转接板各方向图。

2.连接M300 RTK 无人机与Manifold2
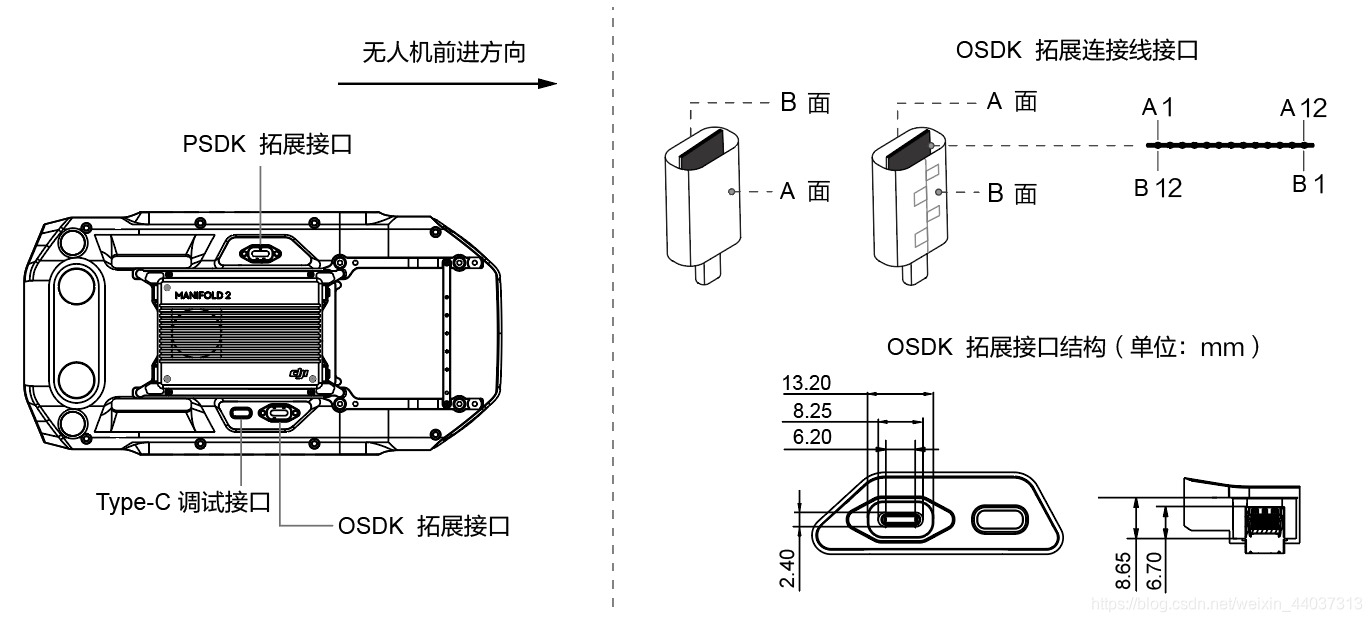
转接板的AB面各有12个引脚,可用于拓展其他功能,这里并未发现和M300的相关之处,故不加赘述。M300、转接板及Manifold2连接如图2。
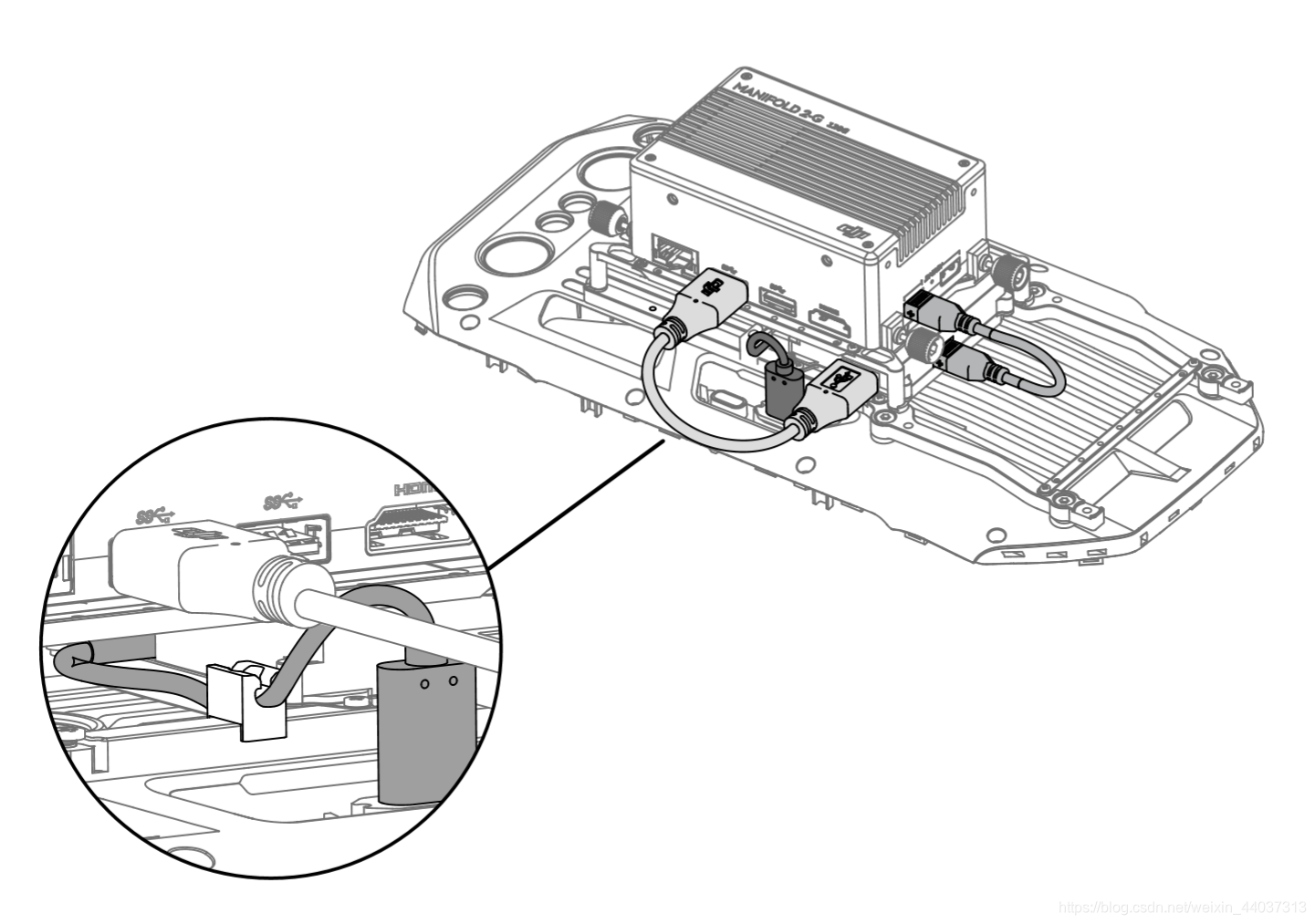
注:
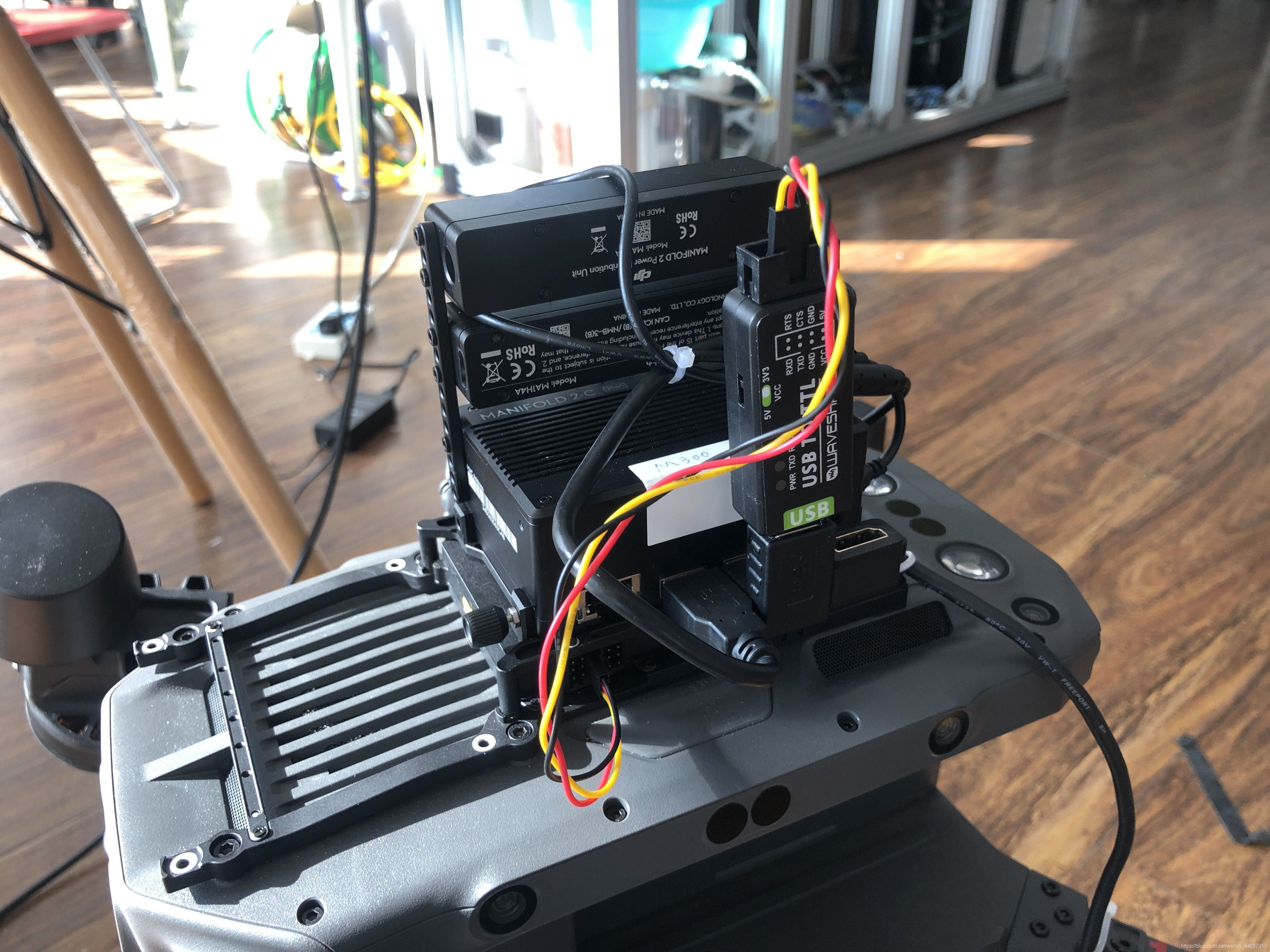
1、如果采用Manifold2-C连接M300,需要一根USB转TTL的线,推荐使用FT232串口模块,我们采用的模块和接线如图3。
2、如果采用Manifold2-G连接M300,则直接利用自带线材将UART1与转接板相连。



三、运行示例程序
1.获取示例代码
可以从https://github.com/dji-sdk/Onboard-SDK网站上下载OSDK的示例代码,也可在本文资源文件夹中找到此部分内容。
2.创建应用程序
首先需要注册成为DJI的开发者,然后登录。
我们实验室的开发者公共账号为:dut_robot@163.com
密码提示为:“3L-4N”
登录成功后就可以创建app,输入一个 “应用的名称”,DJI会给你的邮箱发激活邮件,激活这个app,就可以获得这个app的 “ID” 和 “key” 了。
注意事项:
- “应用的名称、ID、Key 和用户账号” 这些信息是要填写在程序中,所以要特别注意。
- 在ROS 平台开发的应用程序通过UART 接口与无人机通信时,波特率应设为921600,否则可能会出现丢包现象。
- 使用Manifold 2-G 上的ttyTHS2与无人机通信时,需将波特率设置为1000000。
3.运行Linux 示例代码
(1)补充应用信息
在 onboard-sdk/sample/platform/linux/common/UserConfig.txt 文件中填写应用程序的信息:
app_id : //开发者的ID
app_key : //App Key
device: //串口端口号
bauderate : //串口波特率
acm_port : //ACM 端口号
对于2C:首先要将串口改名为/dev/ttyM300,具体原理可参考这里
在/etc/udev/rules.d/目录下创建文件usb2ttl.rules。
sudo gedit /etc/udev/rules.d/usb2ttl.rules
在DJIDevice.rules文件中添加:
KERNEL=="ttyUSB*",
ATTRS{idVendor}=="0403",
ATTRS{idProduct}=="6001",
GROUP="users",
MODE="0777",
SYMLINK+="ttyM300"
加载规则:
sudo udevadm control --reload
重新启动电脑后,系统即可识别 USB转TTL 设备。
这里,我撰写了一个sh脚本文件usb2ttl.sh来实现usb转串口设备端口号的固定和赋予权限。详见此处。
然后设置如下:
app_id : 10***39
app_key :425a8205fd7ee0e5b5f5f9b***db232597e7bff8e7909e1b542***0401fd6b
device : /dev/ttyM300
baudrate : 921600
acm_port: /dev/ttyACM0
对于2G,直接使用默认串口名:
app_id : 10***39
app_key :425a8205fd7ee0e5b5f5f9b***db232597e7bff8e7909e1b542***0401fd6b
device : /dev/ttyTHS2
baudrate : 1000000
acm_port: /dev/ttyACM0
说明: 仅使用OSDK 4.0 时,需配置acm_port,此处默认为/dev/ttyACM0。
(2)编译示例代码
- 确认串口访问权限
编译示例代码前,请在终端上使用ls -l /dev/xxx命令查看硬件平台串口(UART接口)的访问权限,若访问权限不足,请在终端中使用sudo chmod 777 /dev/xxx命令获取串口设备访问权限。
说明: xxx为串口的名称。
- 编译示例代码
进入示例代码的目录:onboard-sdk,使用如下命令将示例代码编译为示例程序:
mkdir build && cd build;
cmake .. 或 cmake .. -DADVANCED_SENSING=ON(使用视觉功能);
make;
注:这步在配置开发环境的时候操作过,个人感觉不用重复执行。
(3)执行示例程序
- 复制配置文件
将配置文件 UserConfig.txt 拷贝到/bin文件中,在功能包中运行此命令:
sudo cp ./sample/platform/linux/common/UserConfig.txt /bin
- 输入程序运行命令(如下以运行flightcontrol 示例代码为例)
./djiosdk-flightcontrol-sample UserConfig.txt UserConfig.txt
- 运行示例程序
从键盘中输入a、b或c运行对应示例程序。
4.运行ROS示例代码
将OSDK 示例代码复制工作空间的在src目录下,使用catkin_make命令进行编译。
执行示例程序前,应补充应用信息。编辑配置文件XXXX.launch,替换应用的ID、Key和波特率等信息。
配置OSDK 4.0.0 接口的节点
rosed dji_osdk_ros dji_vehicle_node.launch
说明
- OSDK ROS 4.0 节点配置文件的路径: /path/to/catkin_ws/src/Onboard-SDK-ROS/launch/dji_vehicle_node.launch
- 若使用rosrun命令,UserConfig.txt文件需被放置在当前运行目录下;
- 若使用roslaunch命令,UserConfig.txt文件需被放置在/home/{user}/.ros目录下.
运行ROS的主节点(OSDK ROS 4.0)
roslaunch dji_osdk_ros dji_vehicle_node.launch
运行示例节点(OSDK ROS 4.0)
打开新的终端窗口,进入工作空间目录下,使用如下命令配置工作空间(以运行“无人机飞行控制”程序为例)
source devel/setup.bash
rosrun dji_osdk_ros flight_control_node
说明
- 如需使用高级视觉功能,请运行advanced_sensing_node示例程序。
四、Debug
开发过程中难免产生bug,遇到的问题及解决方案在此记录,后期不断完善。
1.无人机无法连接
bug描述如下:
[2000362.980]STATUS/1 @ functionalSetUp, L284: Try again after 1 second …
[2000365.325]ERRORLOG/1 @ getDroneVersion, L1676: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are invert
解决方案:若检查完官方提示的检查SDK、波特率、TX RX是否接反以外,仍无法成功连接,可采用如下方法:
1、检查你的遥控器,得打开!!! 并且左上角不能是 “无法起飞” 。(如果因为连接了DJI Assistant2 中的模拟器,要重新插拔调试type-c线、重启模拟器,直到“无法起飞”消失。)
2、在DJI Assistant2 中重新刷一边无人机的固件。(亲测好用)
这篇关于DJI M300RTK + Manifold 2 开发实例的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





