本文主要是介绍XRV-P7型旋变模拟器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
秘级:公开
链接:旋变模拟器XRV-P7型-知乎
链接:旋变模拟器官网
电机旋变仿真器
使用说明书
版本:RESXRVP7
超 源 新 能 源 技 术 中 心
目 录
1 产品应用背景
2 旋变模拟器简介
3 旋变模拟器原理
3.1 有激励EXC旋转变压器原理
3.2 无激励电涡流式位置传感器原理
4 主要功能
5 技术参数
6 信号接口
6.1 激励款旋变仿真器信号接口
网络资源链接
XRV-P7型旋变模拟器使用说明书
1 产品应用背景
本说明书仅适合于超源新能源技术中心旋变模拟器RESXRV-P7。
本产品名:旋变模拟器,具备模拟同步电动机(PSM)或异步电动机(ASM)电机位置角度/转速仿真功能,是驱动电机控制器的设计验证(DV)与产品验证(PV)阶段必备测试辅助设备,可实现工况循环/功率循环测试、可靠性测试、安全故障模拟测试等,广泛应用于新能源汽车用驱动电机控制器的研发测试。
其设计规格符合国标GB/T 18488强制性标准安全保护测试要求。
2 旋变模拟器简介
旋变模拟器XRVP7(带激励款)基于DSP+FPGA级专用芯片平台,采用现代电子技术,能模拟车用高速电机转子位置/转速,该平台产品有带激励和不带激励两款旋转变压器,具备真实的旋转变压器输入输出特性。XRVP7款具有4路电机温度模拟传感器。
特点:极低的功耗方便现场接充电宝供电使用。
特点:可对具备功能安全(ASIL C or D)设计的电机控制器做故障注入或功能安全诊断测试。
XRVP平台系列产品自2017年6月量产首款XRVP2型,历时5年已经多代产品更新,其可靠性、稳定性久经新能源市场考验。
3 旋变模拟器原理
3.1 有激励EXC旋转变压器原理

图.旋变实物
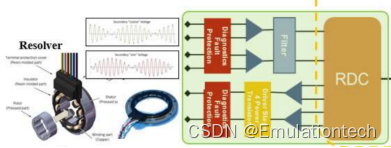
图. 真实旋变接线样式图
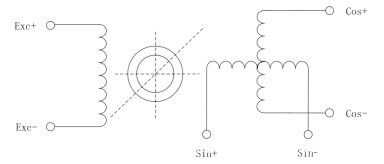
图. 旋变励磁输入与正弦余弦输出关系
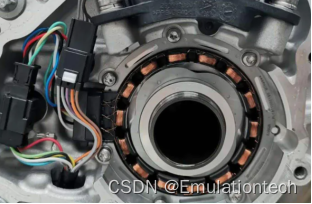
图.旋变安装在电机上
激励信号:Eexc = E ×sin(w ×t)
响应信号:Esin = K × E ×sin(w ×t)×sin(X ×q ) Ecos = K × E ×sin(w ×t)×cos(X ×q )
本仪器通过硬件级采集、运算激励信号,经过DSP+FPGA高速运算,通过两路通道输出,经过复杂模拟运算电路,模拟出旋变模拟器输出特性。
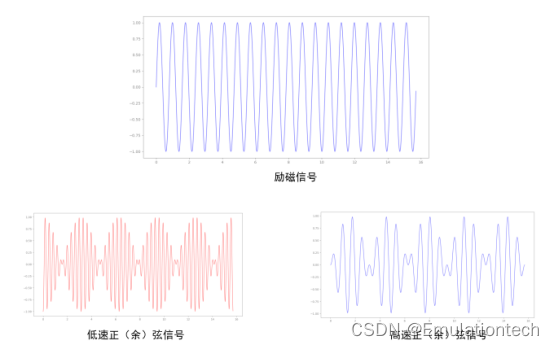
图. 输入输出信号示意
4 主要功能
l 可模拟电机位置角范围:0~360°
l 配有2路电阻,模拟电机定子温度传感器25℃
l 可模拟Sin^2+Cos^2校验和错误
l 可模拟电机转速范围:±30000r/min
l 模拟旋变信号线断路、短路、变比、相位差等故障
l 可CAN实时程控旋变参数与状态
l 可满足电控对旋变功能安全的合理性校验
l 可实现转速斜率设定
5 技术参数
| 序号 | 指标 | 指标参数 |
| 1 | 模拟器尺寸 | 100mm × 30mm × 75mm |
| 2 | 设备功率 | 2W(可使用充电宝试验场供电) |
| 3 | 仿真器版本 | 旋变仿真器 ¨ RPS仿真器 |
| 4 | 输入信号(入力電圧) | AC 2Vrms~10Vrms(典型值7Vrms) |
| 5 | 输入信号(周波数) | 激励款旋变仿真器:1路EXC(5kHz~20kHz) |
| 6 | 输出信号1 | 激励款旋变仿真器:2路 正弦/余弦 电涡流款仿真器:2路 正弦/余弦 |
| 7 | 输出信号2 | 2路 10kΩ电阻输出 |
| 8 | 极对数(軸倍角) | 1~36 |
| 9 | 转速精度 | 低转速≤±3rpm 高转速≤±0.018% |
| 10 | 转角步进值(角度精度) | 0.36°(21.6’) |
| 11 | 速度范围 | ±30000rpm(6极对数) |
| 12 | 转角范围 | 0~360° |
| 13 | 控制方式 | CAN总线/扩展帧/波特率500k/J1939协议 |
| 14 | 故障注入(Fault Injec.) | EXC_Sin_Cos断路_短路/变比超上_下限/相位偏差 |
| 15 | 设备供电 | 5V DC |
| 16 | 变压比(変圧比) | 0~180%(100%表示0.286) |
| 17 | 信号延迟 | <0.1uS |
| 18 | 负载电流 | ≤60mA |
6 信号接口
6.1 激励款旋变仿真器信号接口
略
6.2 旋变模拟器与样品接线图
略
7联系方式
略
附 录
本产品通过CAN总线控制使用,建议以下3种使用控制方式。
第一种方法:【使用Vector CANoe控制旋变仿真器】
使用随产品赠送的CANoe工程文件,免费提供基于CANoe上位机界面的工程控制文件,设置灵活方便,可实时设置转速、极对数,调试模式下可设置旋变变比等故障注入功能等。
第二种方法:【使用同星CAN或周立功CAN设备控制旋变仿真器】
使用同星CAN或周立功CAN,按照以下通信协议【XRV-P7型旋变模拟器通讯协议】发送控制命令。波特率500k。扩展帧。
第三种方法:【使用RS485串口控制旋变仿真器】
需额外购买专门的485转CAN协议转换器,然后可使用超源赠送的上位机软件或按照以下通讯协议发送控制命令。详细操作参照C类接线说明
网络资源链接
- 旋变模拟器是什么?
--知乎https://zhuanlan.zhihu.com/p/610397141
- XRV-P7型旋变模拟器故障仿真操作详解
--知乎https://zhuanlan.zhihu.com/p/630260520
- XRV-P7型旋变模拟器通讯协议
--知乎https://zhuanlan.zhihu.com/p/614596356
- 如何制作旋变模拟器的CANoe操作面板【视频】
--知乎https://www.zhihu.com/zvideo/1619996411503820801
- 旋变模拟器输出波形实测【视频】
--知乎https://www.zhihu.com/pin/1646261852081401856
- 旋变模拟器应用场景
--知乎https://www.zhihu.com/pin/1644837090750939136
- 为什么旋变信号测不准?
--知乎https://www.zhihu.com/pin/1627734188823384064
- 为什么旋变模拟器比小电机带旋变方案更优?
--知乎https://www.zhihu.com/pin/1627823022819266560
这篇关于XRV-P7型旋变模拟器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








