本文主要是介绍关键词‖旋变传感器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

旋转变压器(以下简称旋变)安装在永磁同步驱动电机的非传动端,其作用是检测转子的位置和速度。目前,通常采采用结构简单、坚固耐用、环境适应性好的磁阻式旋变作为位置传感器。

磁阻式旋变实际上是仅有定子和转子的发电机。定子由定子铁心、产生信号的定子绕组和励磁绕组构成,转子由凸极结构的转子冲片叠压而成。
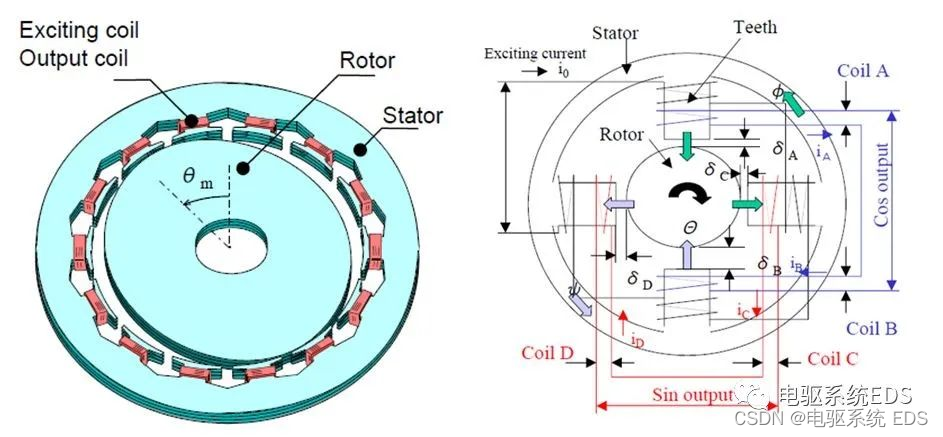
当给定子槽内的励磁绕组施加1~10kHz的正弦交流电压时,一旦转子旋转,由于转子的凸极效应,气隙磁导将发生变化:每转过一个转子凸极,气隙磁导变化一个周期;转过一周时气隙磁导变化的周期数等于转子极对数§。气隙磁导变化导致输入、输出绕组之间互感的变化,进而导致输出绕组的感应电势也随之发生变化,由此在信号绕组中感应出正、余弦信号,该信号传送给电机控制器,通过电机控制器的解码电路(硬件解码或软件解码),解析得出转子的位置。
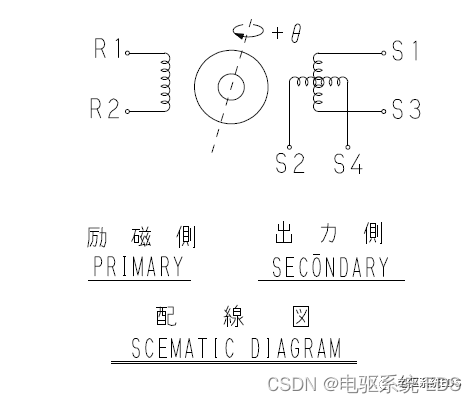
当转子从基准电气零位正向转动机械角θ时,其励磁电压和输出电压为:
URIR2 = Esin(2πft)
US1S3 = KUR1R2cos(pθ)
US2S4 = KUR1R2sin(pθ)
式中,URIR2为励磁电压,V;E为励磁电压幅值,V;f为励磁电压频率,Hz;K为变压比;p为极对数;θ为转子从基准电气零位正向转动的机械角,(°);US1S3为S1与S3端子之间的电压(余弦电压),V;US2S4为S2与S4端子之间的电压(正弦电压),V。
旋变电路输入、输出波形:
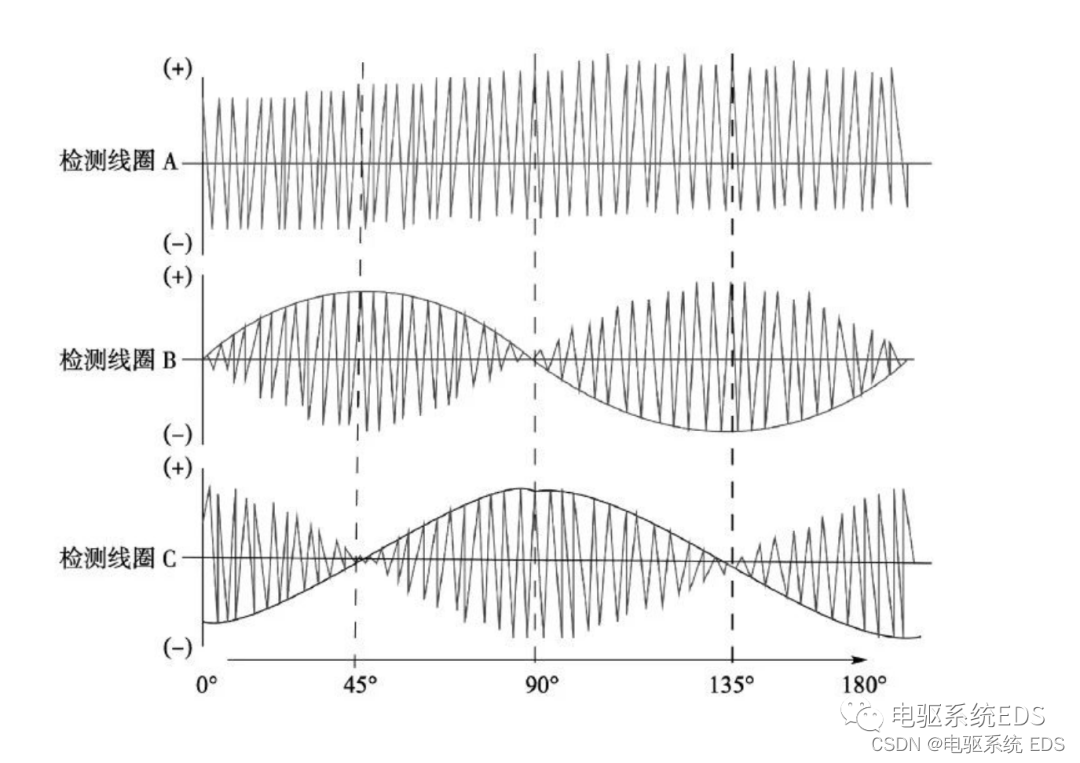
电驱台架实验室实测旋变原始信号波形如下图。

旋变的质量不仅影响永磁同步驱动电机输出的位置和速度精度,还影响其可靠性。因此,可参考《磁阻式多极旋转变压器通用技术条件》(GB/T 31996-2015)及电动汽车的应用特点对旋变提出要求:
(1)能适应电动汽车的恶劣环境条件,为此旋变定子线圈一般要灌封,转子铁心紧固可靠、采用键与驱动电机转轴连接、表面采用镀锌等防护。整个旋变应进行高温试验、低温试验、高低温冲击试验、湿热试验、盐雾试验和振动冲击试验(可以随机)等环境适应性试验。
(2)寿命和耐久性与驱动电机相同,在整个全生命周期内不需要更换旋变。(3)能承受旋变安装中可能引起的一定的偏心和倾斜。
(4)当按照供应商所规定的安装要求将旋变安装固定到驱动电机上时,旋变的输出波形应为平整的正、余弦波形,不允许出现缺失波形或毛刺现象。
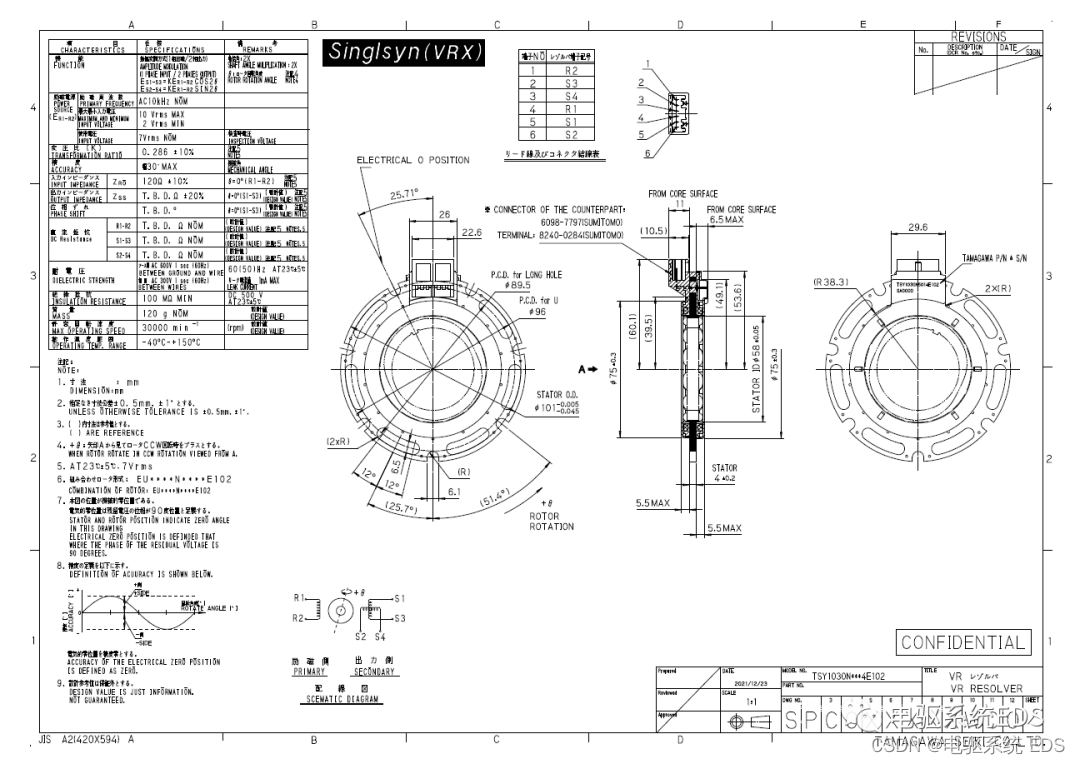
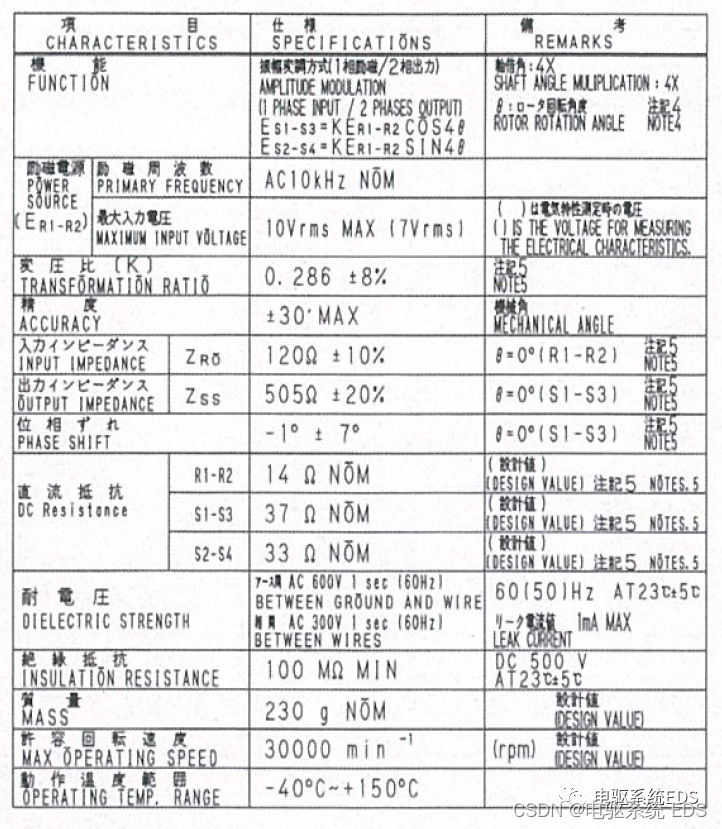
旋变供应商应提供至少包含如下信息的旋变图纸:
①工作温度范围;
②外形图(安装尺寸和引出线长度)、旋转方向和引出线定义;
③极对数;
④额定电压和额定频率;
⑤电路图及电压;
⑥变压比、电气误差;
⑦相位移阻抗、电阻和基准电气零位;
⑧最高工作转速。
如下是一款典型的旋变图纸及关键信息:
在实际项目应用过程中,会遇到诸多关于电机转速信号异常的相关故障,除了从故障代码判断原因之外,在项目研发阶段我们常常根据以上原理从旋变原始信号开始排查故障原因。
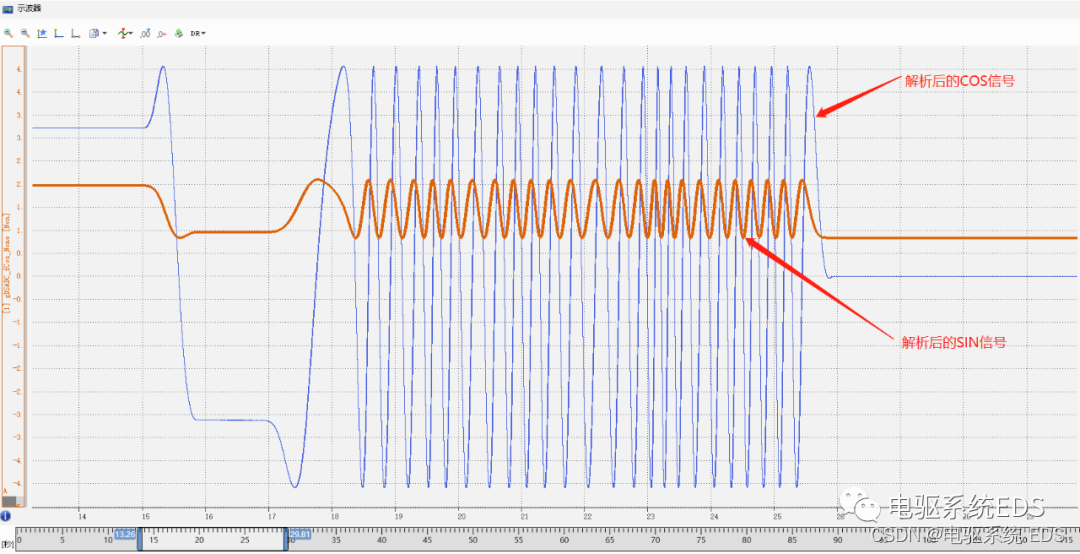
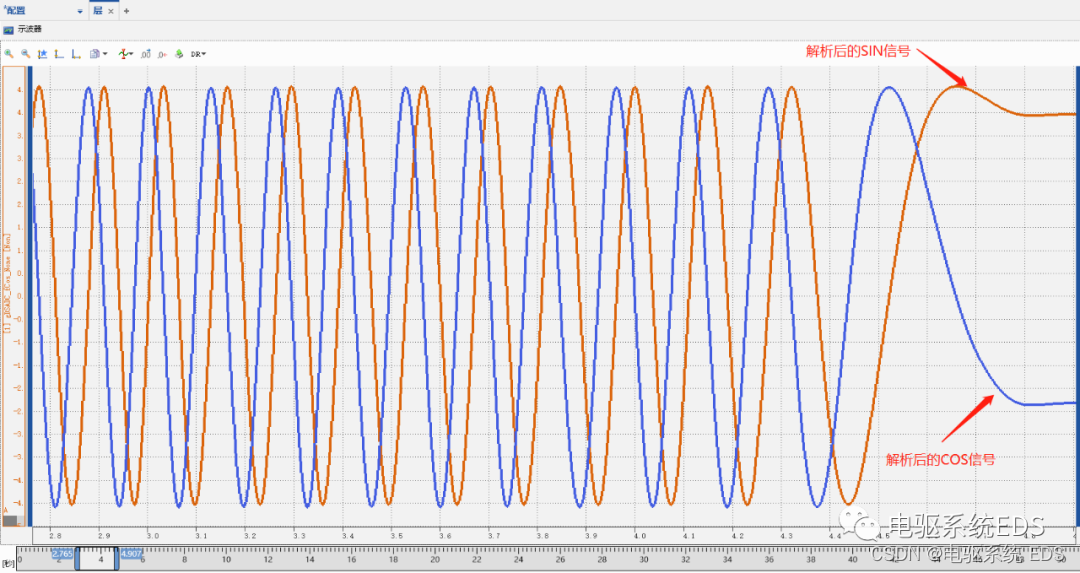
小编在实际在研项目中遇到过很多电机转速异常的情况,翻了一下数据,找到以下两张图做个示例:第一张是由于接插件接触不良导致SIN阻值变化,进而使得解析出来的波形异常,第二张图改善后正确的波形。
这篇关于关键词‖旋变传感器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




