本文主要是介绍正弦波控制器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
有感FOC控制器可定制,联系方式:zzwwpp@foxmail.com
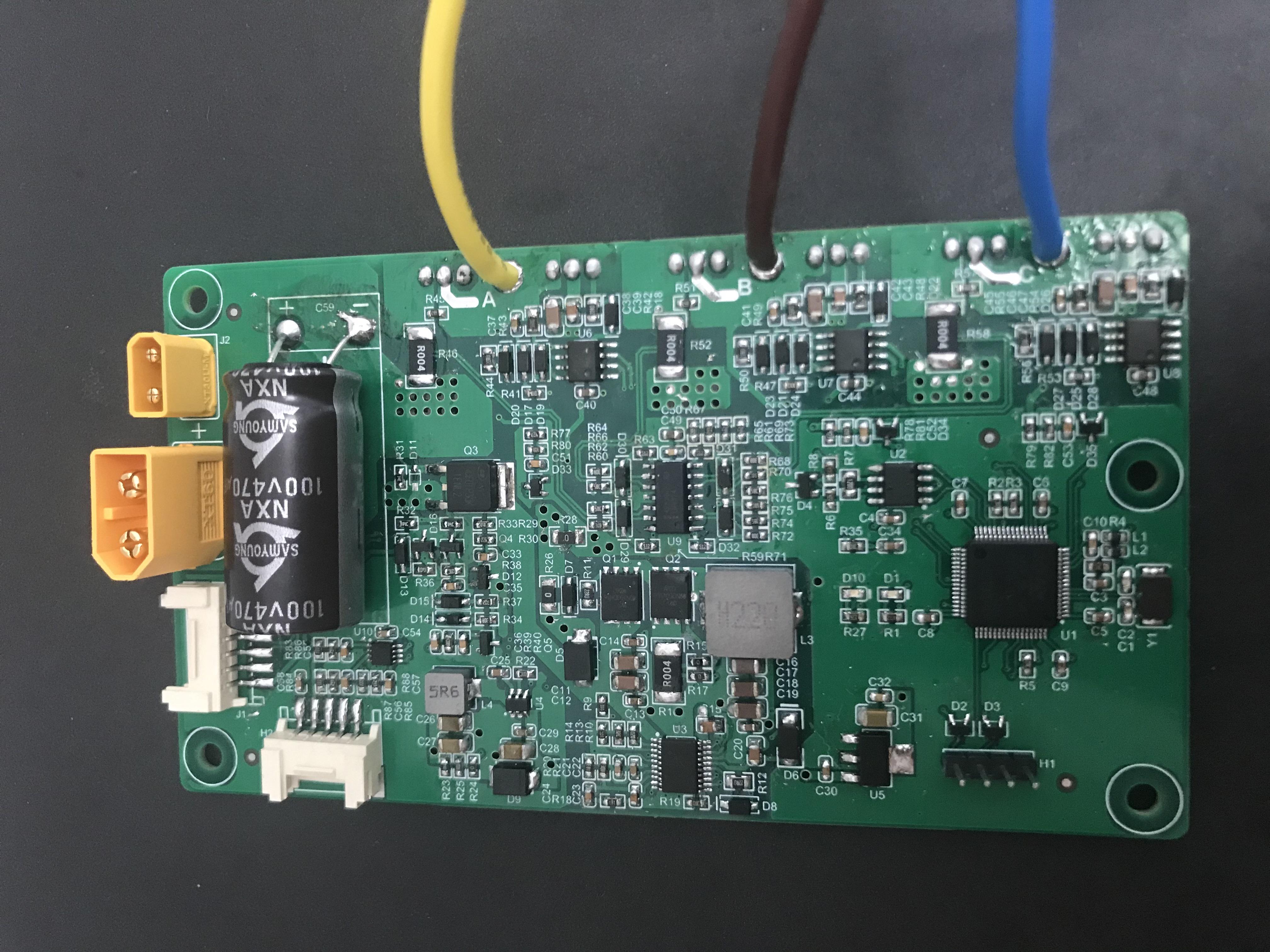
无刷电机控制器:
额定电压:28V-60V
最大输出电流:≤30A
特点:
1.采用485通信,通过串口协议发送控制指令(速度,和旋转方向正转或反转),控制器内部有速度闭环,用户通过485发送控制器控制指令即可。
2.485通信为差分方式通信,在硬件上可保证通信的可靠性,同时通过带校验的协议指令在软件上进一步加强通信可靠性。
3.外部接口(接插件)可提供1路 12V 最大10A电源,可用于给其它设备如仪表等提供电源。
4.外部接口(接插件)可支持按键开关机。
5.关键器件全部采用国外进口芯片,从硬件上保证整个控制器的稳定性和可靠性。

下面是演示视频:
弦波控制器
这篇关于正弦波控制器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








