本文主要是介绍倍福---EL2262模块飞拍配置,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
控制器安装了twincat3,用EL2262实现相机飞拍功能。本文档只介绍如何通过EL2262实现飞拍的触发,并不涉及视觉方面的处理
参考文章:
https://author.baidu.com/home?from=bjh_article&app_id=1669190598708386
https://mp.weixin.qq.com/s/r4Iq8kOP-o4_M8vCce5M9g
1、 飞拍的应用
在大多数场合,只能当被检测工件和相机都处于静止状态下才能进行拍照,拍照完成后,再移动工件或相机,进行下一个工件的检测。移动到位后,物体可能会晃动,需要等待物体静止后才能进行再次拍照。这些都会限制设备工作的节拍。假如能实现运动过程中进行拍照,将会极大提高工作效率。
飞拍对控制系统的核心要求是在高速运动过程中,在单个或多个设定位置,进行单次或多次连续精确触发相机拍照。不同的应用场合,可能是工件在移动,或者是相机在移动。通常相机采用硬件外触发方式。视觉系统可以是倍福的或者是第三方的视觉系统。
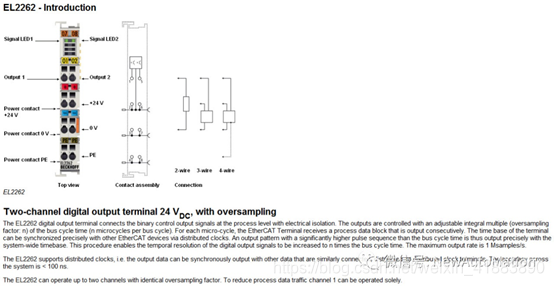
2、 EL2262功能介绍
EL2262是超采样模块,使用EL2262 XFC超采样数字量输出模块,能在轴的指定位置触发相机拍照。
3、 EL2262接线图
这篇关于倍福---EL2262模块飞拍配置的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






