本文主要是介绍S32K1xx的MBD工具箱加载及激活,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、安装Matlab,本次使用Matlab2022b
2、打开Matlab,加载含有MBD工具的目录,如下
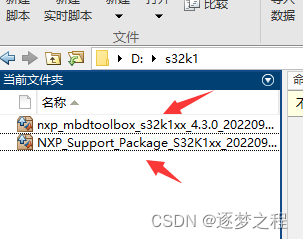
3、双击第一个---安装,正常安装就可以
4、双击第二个---安装,正常安装就可以
5、找到MBD的安装位置如下
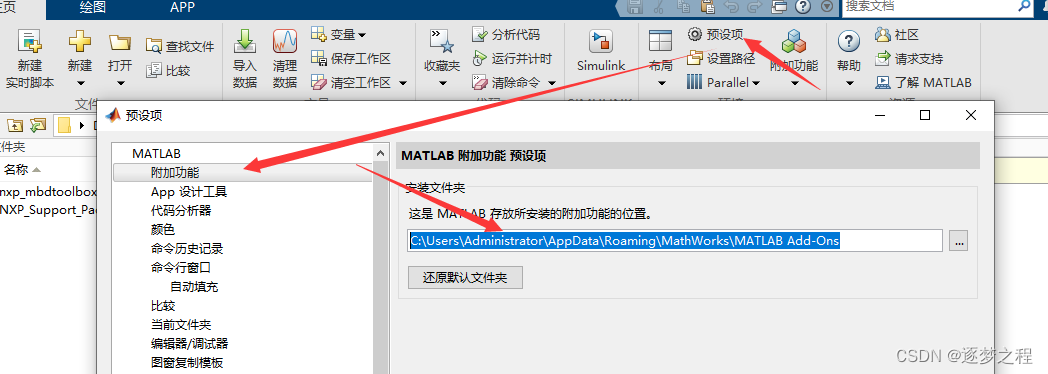
C:\Users\Administrator\AppData\Roaming\MathWorks\MATLAB Add-Ons
复制此地址到Matlab的地址栏中,并回车,并继续找到如下文件夹
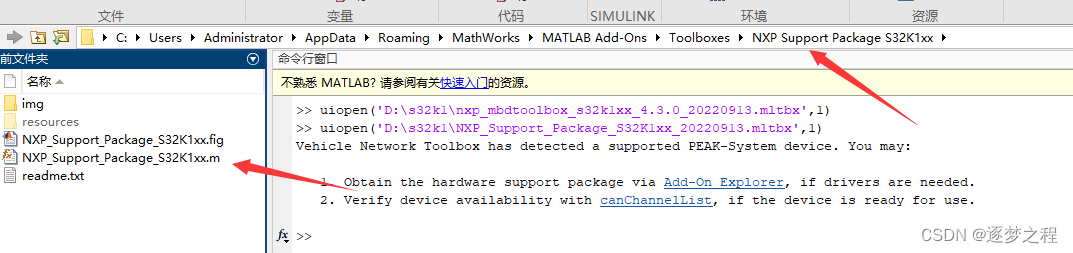
6、双击并运行“NXP_Support_Package_S32K1xx.m”如下

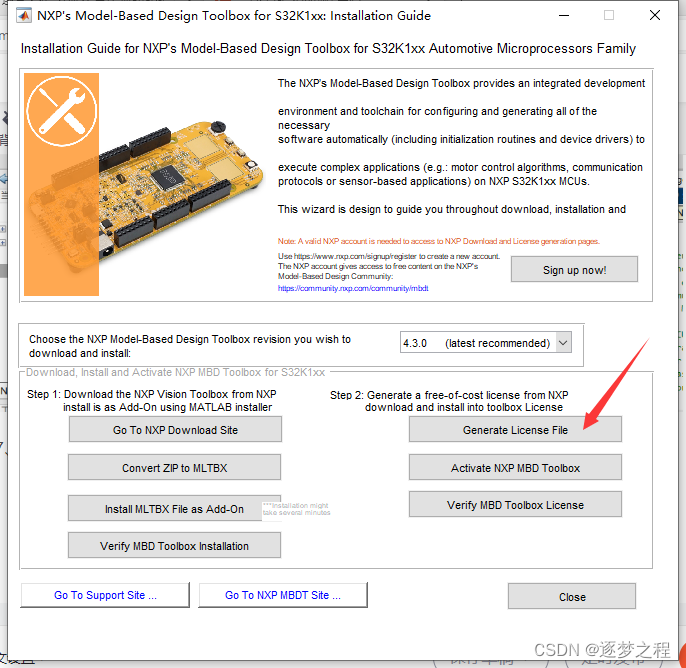
7、点击弹出界面的一个按键,将跳转网页,一下需要链接网络
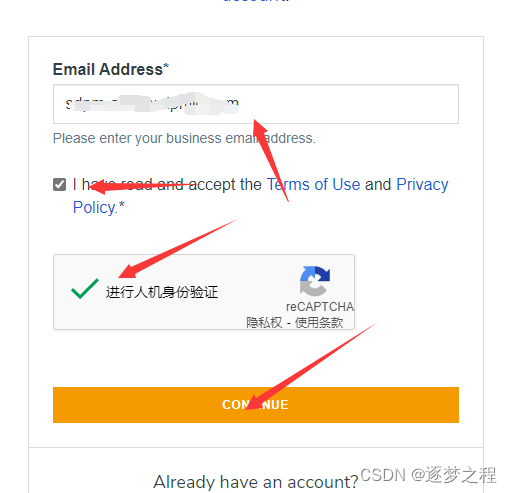
8、注册NXP账号如果已经有了,直接登录,准备一个邮箱

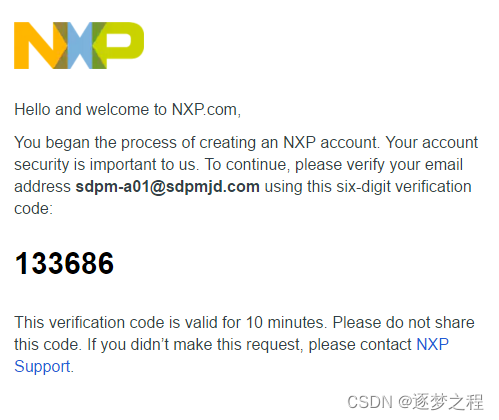
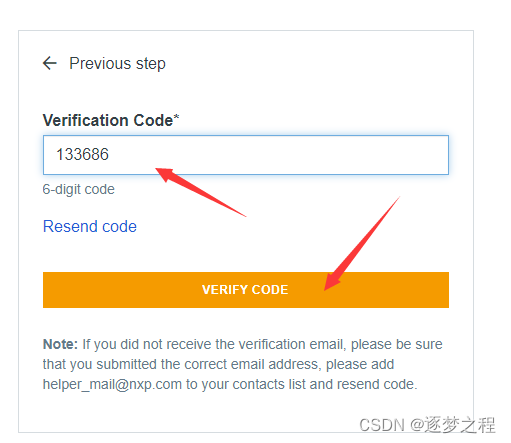
等待邮箱收到的验证码
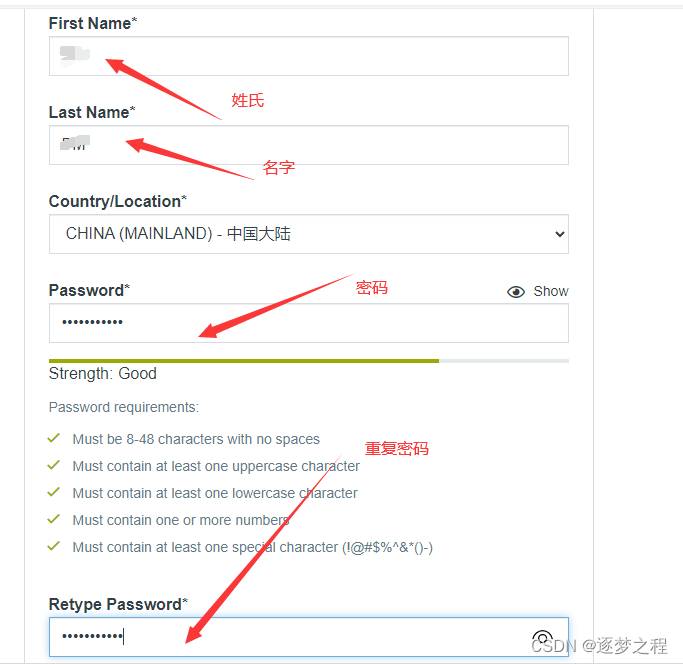
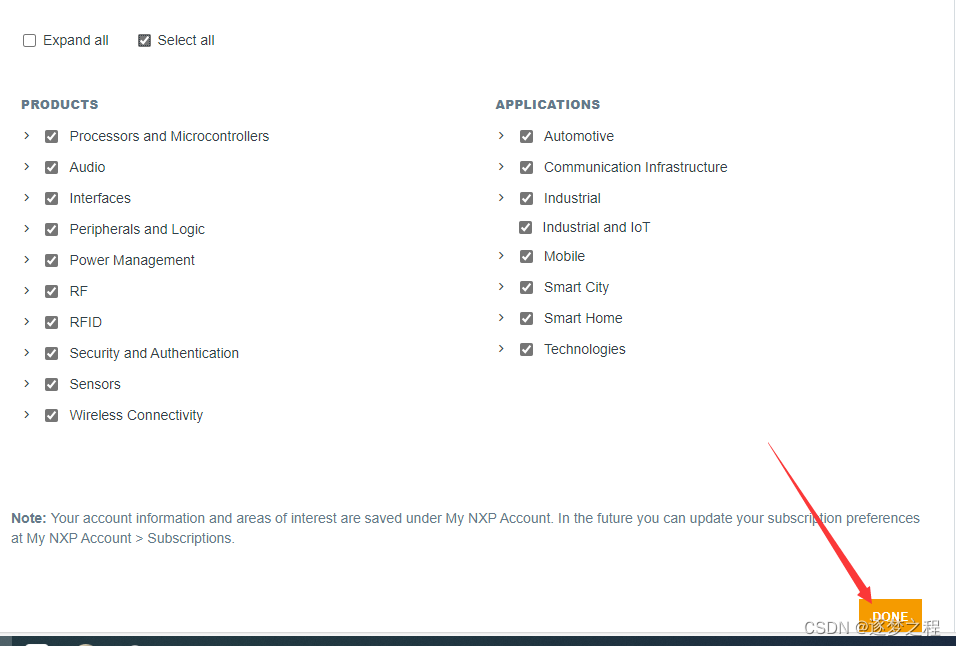
填写基本信息
填写补充信息
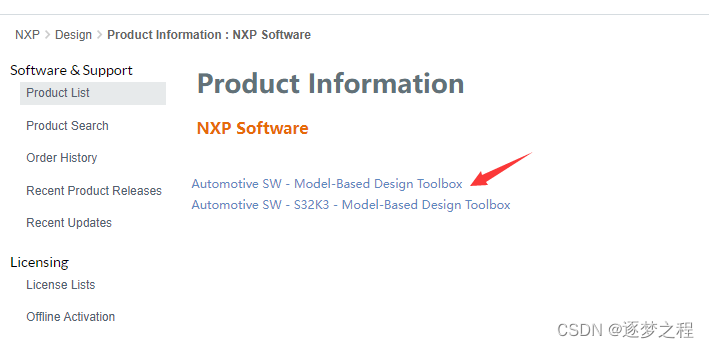
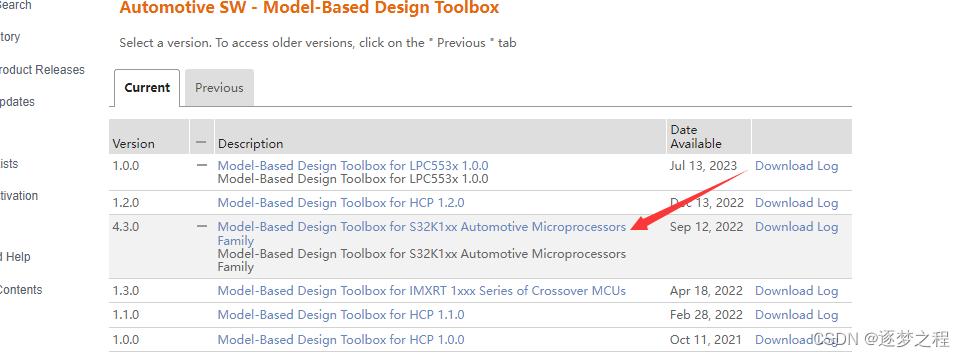
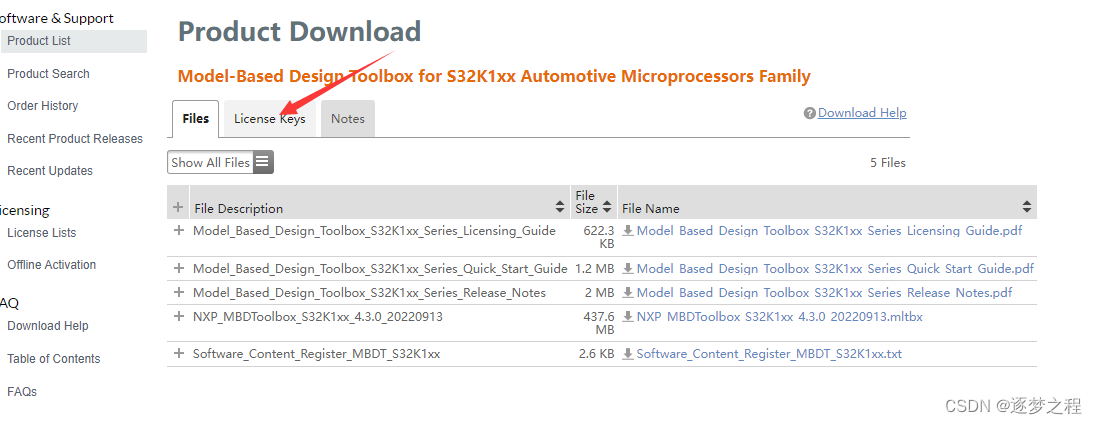
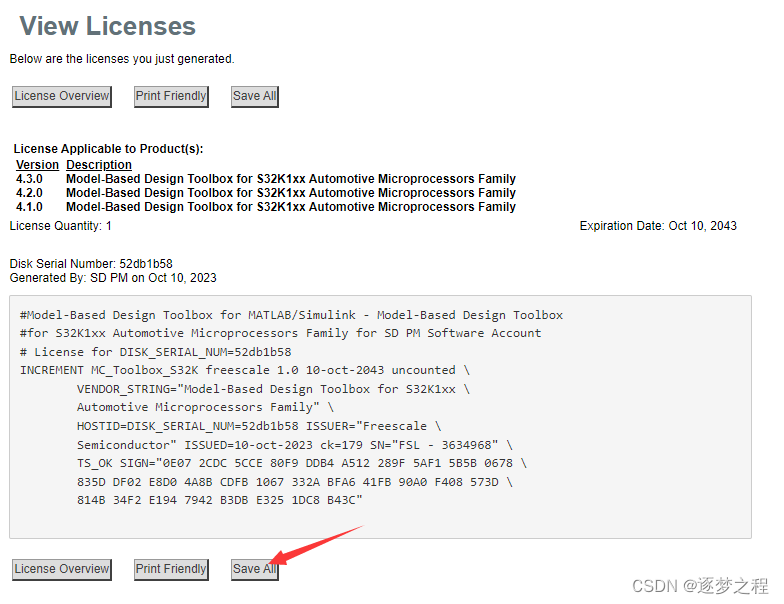
9、进入许可证网站
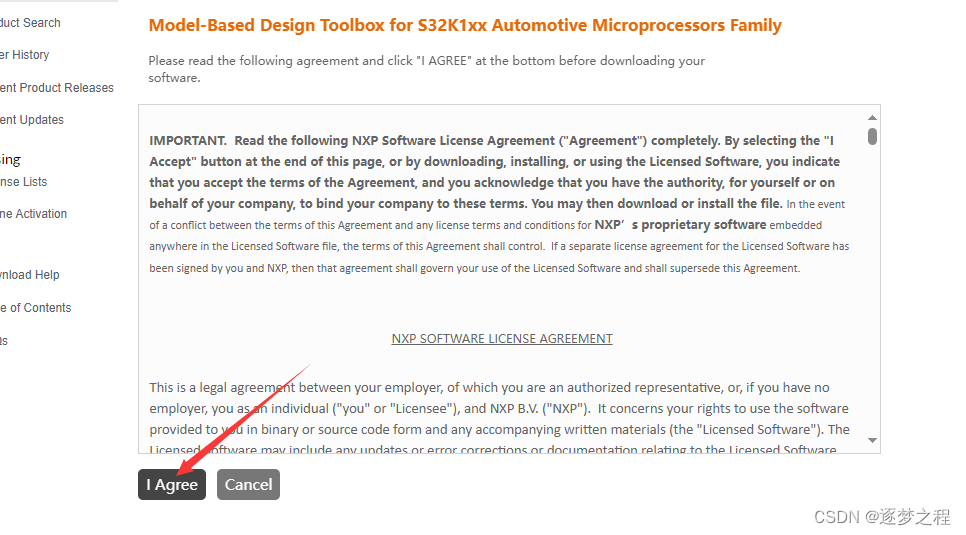
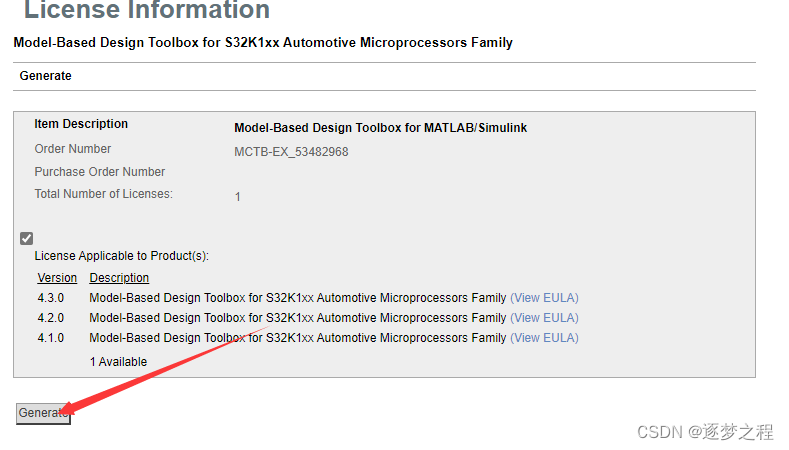
10、生成许可证
在Matlab的命令窗口输入“mbd_s32k_hostid” 获取磁盘序列号,(不同硬盘此号不同)
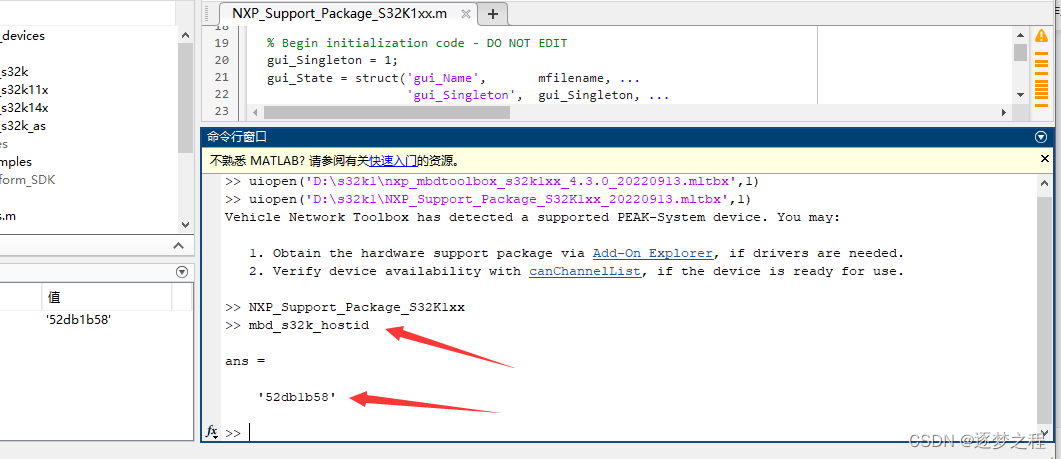 生成序列号
生成序列号
 许可证可用20年
许可证可用20年
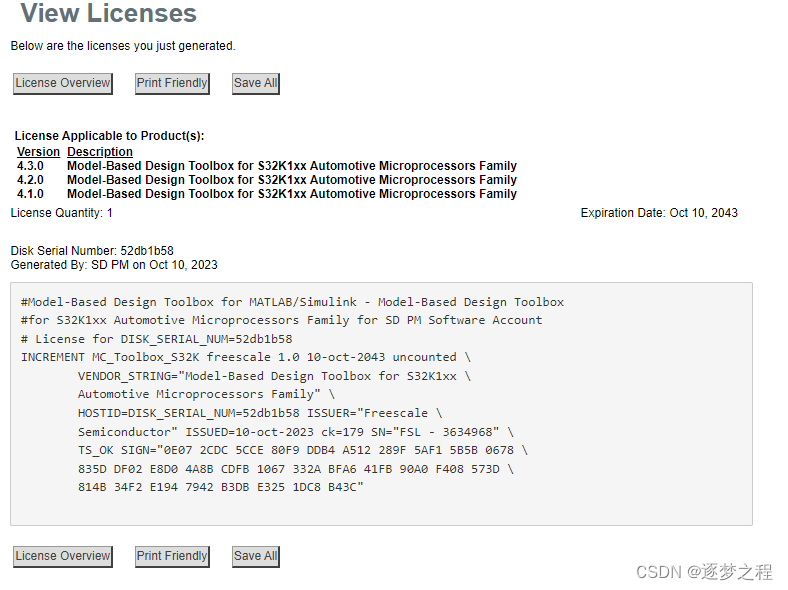
11、下载许可证
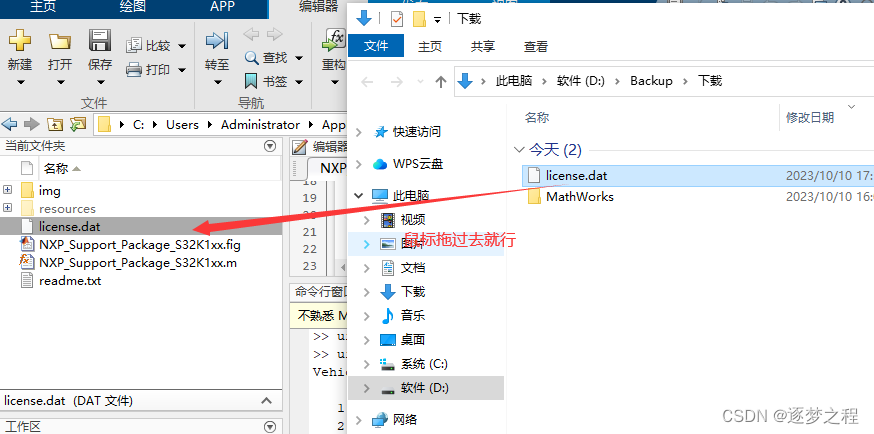
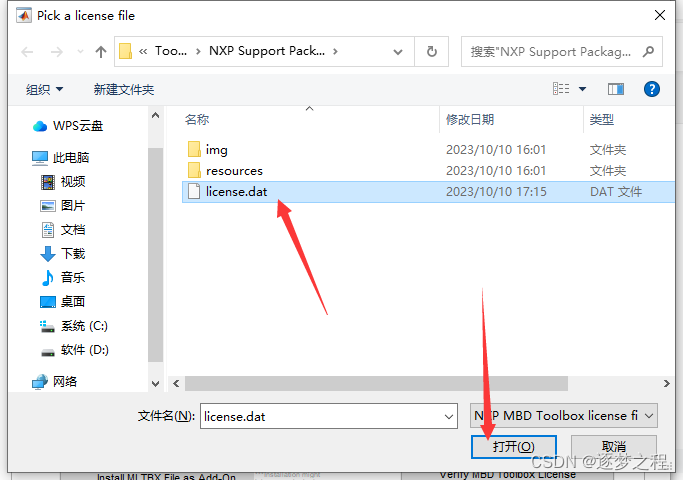
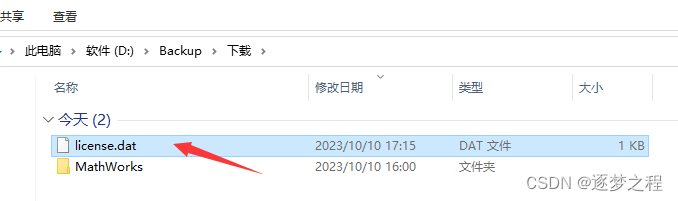 12、把许可证放在安装MBD工具的目录下
12、把许可证放在安装MBD工具的目录下
13、加载MBD许可证
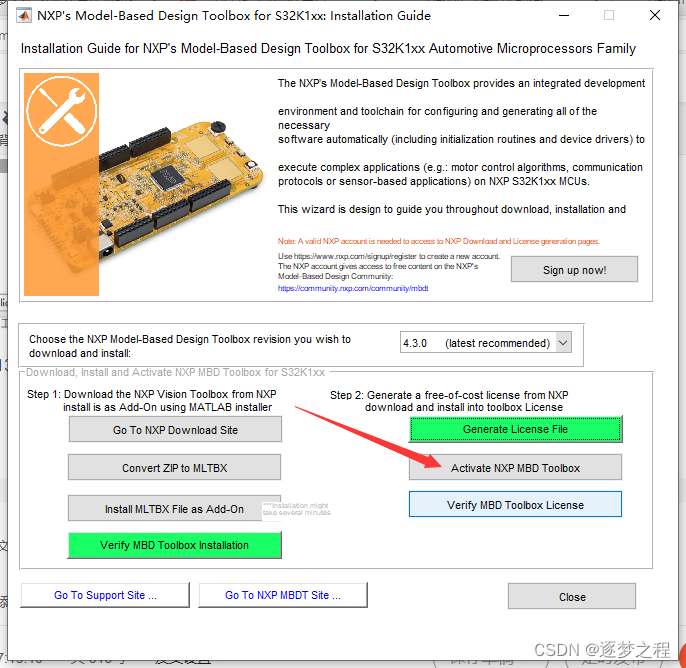
默认目录
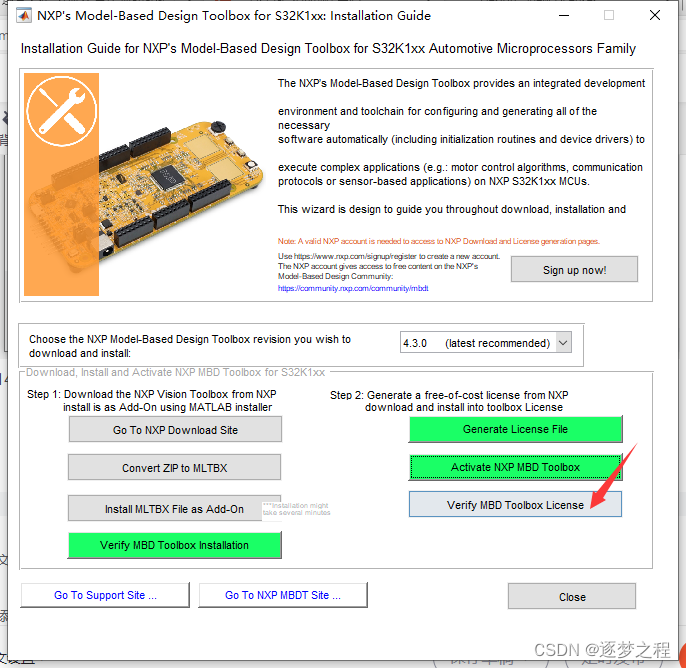
 14、验证是否激活
14、验证是否激活
成功标志,如下
15、Matlab加载MBD工具完成
这篇关于S32K1xx的MBD工具箱加载及激活的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








