本文主要是介绍G1吊舱全面升级,新增软件驱动库,支持多平台使用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
G1吊舱,是我们去年推出的一款自研的云台产品,体积小巧,功能强大,上市后得到了很多朋友的支持。在上市后的一年期间,我们多方收集用户反馈,并基于用户的宝贵建议对G1吊舱进行了软硬件上的升级。
一、软件层面升级
1、软件算法优化
相对于旧版本,优化后软件算法在初始化运行中更加精准稳定,启动更快,环境适应性也更强。
2、新增软件包Amov云台相机通用驱动库
功能及亮点:
-
支持多种使用平台;提供ARM/X86架构的windos/linux库文件;
-
支持多种云台,包括但不限于G1、Q10F产品;
-
例程丰富;提供C++及Python例程;
-
支持最小依赖,无需引入除系统库外的第三方库,易于项目集成,采用CMake构建,方便部署;
-
支持长期维护,后续Amov云台相机系列产品均支持该驱动库。
二、硬件层面升级
1、新增减震结构
可过滤无人机运行时的高频振动,大大提高画面稳定性。

2、结构优化
此外,我们对结构空间也进行了优化,在增加减震机构的情况下将产品重量由107g降低到了99g,把更大的负载空间预留给用户。

三、G1吊舱开发者套件
旧款G1开发者套件由G1吊舱和AllSpark机载计算机集合并嵌入目标跟踪算法软件,具有高精度、快速响应控制并将目标牢牢地锁定在视场中心等特性。
为满足更多领域对目标跟踪的要求,我们基于旧款G1吊舱开发者套件做了升级,新款套件将部署全新的无人机视觉库、不仅功能更强大、例程丰富,还可以根据用户实际需求自由组合计算机、Allspark、吊舱和图传。
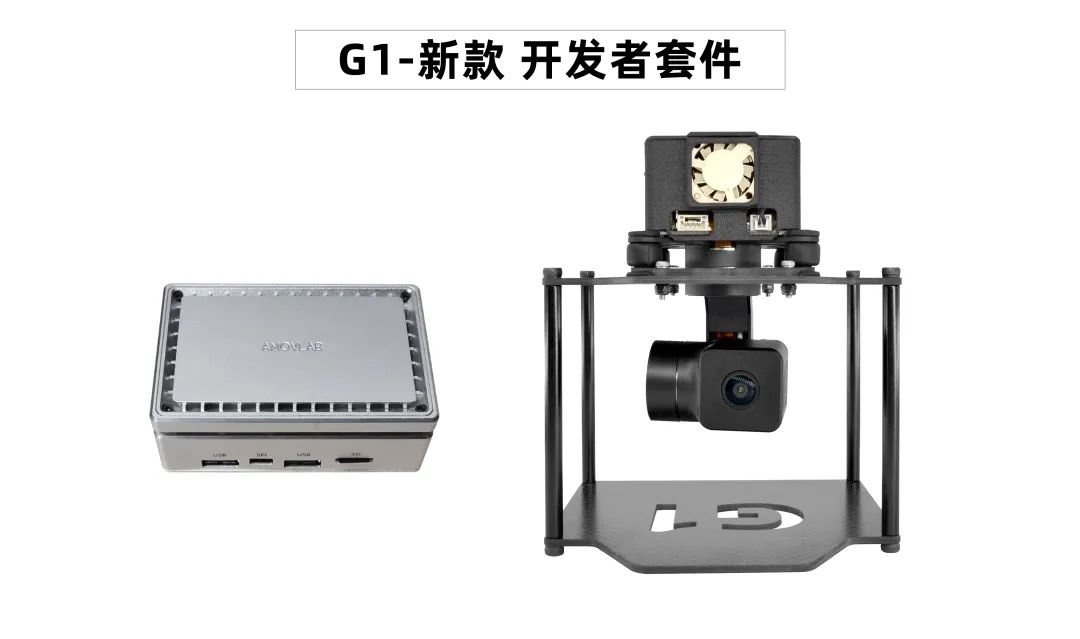
硬件组成:包含G1吊舱和AllSpark机载计算机。
软件组成:包含无人机视觉库,以及两种吊舱视觉跟踪算法,分别是KCF框选目标跟踪算法、YoloV5+DeepSort多目标跟踪算法。
四、G1开发者套件应用场景
最后,我们通过G1吊舱开发者套件最典型的应用场景——远距离的目标识别,一起来看看该套件的实际表现吧!
产品使用手册:
https://docs.amovlab.com/gimbalwiki/#/src/G1/doc/%E5%90%8A%E8%88%B1%E7%AE%80%E4%BB%8B
- END -
阿木实验室:为机器人研发提供开源软硬件工具和课程服务,让研发更高效!
这篇关于G1吊舱全面升级,新增软件驱动库,支持多平台使用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




