本文主要是介绍无人机开发-图传技术,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
2016年,是中国无人机市场的元年,无人机能够一跃进入大众视野,并迅速在大众市场火热发展,是很多人始料未及的。从刚开始的空中摄录,到后来的实时摄录,方便的无人机图传功能无疑为无人机加足了筹码,赚足了眼球。博主就来分析一下无人机图传技术。
一.观念
从“图传”的叫法可以发现,这并非一个专业的定义,大概是从某些资深航模玩家口中发展而来。专业的航空航天器并没有独立的视频图像传输设备。图传的概念只存在于消费类无人机领域。
二.限制
1.成本:
不必去怀疑可以通讯多快多远,无线通讯技术发展到今天,没有人怀疑火星传回的1080P图像了。
百公里以上无人机图传并非不可实现,但百万元以上的价格也相对昂贵。
目前市场上的1080P图传产品售价基本均在1700美元以内,成本也就成为了消费类无人机图传设计的第一条限制。
2.法律:
中国无线电管理的最高法律文件是《中华人民共和国无线电管理条例》,立法机关为国务院和中央军委,由各级无线电管理机构执行监管。如果使用者希望给图传单独申请执照,则需要该图传首先获得《无线电发射设备型号核准证》,其依据是国家《无线电频率划分规定》中的有关无线电发射设备技术指标的规定。取得专业电台执照并不是不可操作,只是在消费类无人机领域没有办法推广。
对于专业航空航天器来说,频谱划分时已留有专门的测控频段,而消费类无人机只能老老实实地屈就于ITU-R(ITU Radio Communication Sector,国际通信联盟无线电通信局)的ISM频段(Industrial Scientific Medical,工业化科学医疗频段)。
13.56Mhz、27.12Mhz、40.68MHz、433Mhz、915Mhz、2.4Ghz、5.8GHz都是1W以内无需执照发射的;
433MHz及以下频段通常很难满足高清图传的带宽要求;
915Mhz频段有一半已经被GSM占用;
L波带宽并不富裕;
S波段的2.4GHz也就成了1080P获得远距离的首选,但4K或者更高清晰度的图传设计者却很难在S波段的带宽上找到便宜;
C波段的5.8G则可以做得更宽,不过相同发射功率和接收灵敏度下5.8G与2.4G相比通讯距离仅为41.4%,并且其衰减对水气更敏感,实际通讯距离则不到30%,两者各有利弊。
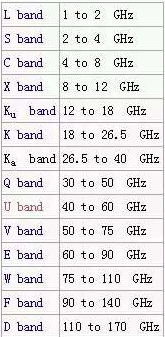
图1 无线频谱
三.编码技术
1.软/硬件结构:OpenMAX IL + Venus
2.编码标准:H.264(APQ8074)/H.265(APQ8053)
3.码率控制:CBR(Constant Bit Rate)网络传输中所谓的 CBR 一般是 ABR(平均码率),即单位时间内的平均码率恒定,编码输出有缓冲可以起到平滑波动的作用。

图2 码率
4.码率/帧率自适应:Dynamic video rate adaptation (rave)是Qualcomm提供的算法库,基于变化的Wi-Fi带宽和信道质量,计算出合适的视频流码率和帧率,这有助于最大限度地减少延迟和图像损坏问题。
5.I帧间隔调整:30fps帧率下,30帧或者60帧一个I帧。能在较低的码率下达到较高的图像质量。
6.I帧重传:如果I帧丢失或者损坏,图像会有较长时间的卡顿。当接收端反馈此情况,发送端立即重传I帧,会减少卡7.顿时间。
8.I帧携带SPS/PPS信息:缺少SPS/PPS信息,接收端将不能正确解码,所以流中需要带这些信息,防止断线重连后黑屏。
四.通用协议
1.RTP
1.1.协议简单,易组入
1.2.jrtp开源库:X许可,几乎无限制。
1.3.针对H.264/H.265编码特点进行优化:不同的组包策略。
1.4.扩展可配置发包间隔:平衡码率波动,防止瞬时码率过大。
1.5.使用RTP扩展头:传递帧号,用于算法的数据同步。
1.6.使用内存池:减少模块间内存拷贝,降低延迟。
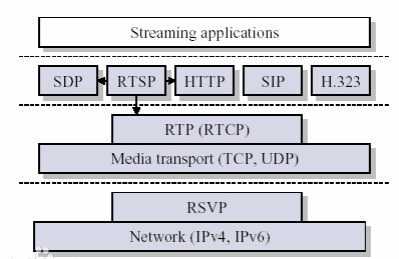
图3 RTP
2.RTSP
2.1.支持组播:Live555开源库
2.2.LGPLv2.1许可,可以在商业软件中引用。
2.3.相关类说明
图4 RTSP相关类
2.4.数据传递示意图:RTSP server接收到RTSP开始后,PreviewH264OnDemandMediaSubsession创建了H264PreviewSouce类和H264VideoStreamDiscreteFramer类之后H264PreviewSouce通过队列从Rtspsink中获取h264数据,经过处理后发送到手机端。

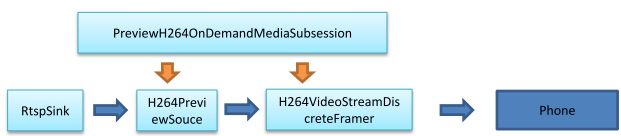
图5 RTSP 数据流
3.图传开发中遇到的问题
实时播放过程,最难解决的问题是图像卡顿,图像花瓶问题,图像在各个手机表现不一样,在性能好的手机上面,会出现图像抖动厉害的情况等等。
要解决图像卡顿的问题,先要知道卡顿的原因:
1.由数据在传输过程中丢失,没有数据,造成的卡顿
2.app端接收不及时,造成数据丢失而引起的卡顿
3.为了减少花屏,而造成的卡顿,比如说刚好丢失了i帧,为了后面显示不花屏,会对后面的p帧进行抛掉,直到下一个i帧才开始显示
我们都知道花屏的原因是因为丢帧造成的,比如说丢失了 i帧,关键帧,后面的p帧送去给ffmpeg解码得到的图像是花屏,或者马赛克等等(也有一种是大p,小p的说法,这里就不详细说了),【注意,这个传输过程没有用到b帧,整个传输过程只有两种帧 i帧,个p帧】,多一点花屏,可以减少卡顿,客户更能接受的是卡顿,而不是花屏。
解决方案:
第一个问题:由数据在传输过程中丢失,没有数据,造成的卡顿,有外部环境的影响,也有图传板信号的稳定性影响等等,app端没有很好的解决方法,无非就两个选择,一个是tcp传输,一个是udp传输。根据实测,tcp效果更好一点。
tcp :数据传输过程,能保正数据的完整,所以花屏少点,距离相对upd会近一点,
udp:传输过程不保证数据的完整性,容易花屏,距离比较远
第二个问题:app端接收不及时,造成数据丢失而引起的卡顿,我这里遇到的情况是这样的,之前的接收数据跟解码同一个线程,显示另外一个线程,这样就有一种情况就是解码不及时,会造成接收线程阻塞,从而影响了数据的接收(udp),解决方案是接收数据自己一个线程,解码跟显示一个线程,中间通过缓存队列来进行数据的共享,即增加缓存,基本所有的在线播放都是用这个方式。
第三个问题:就客户需求而定,我这里为了不花屏,会直接丢掉
项目使用mpv+EventBus的方式非常灵活,模块的替换,复用,重写都很灵活,而且java层没有特殊必要,一般都不会动,优化各个方面都是在jni层,也主要是图传的优化,这样也方便版本的迭代,要不客户版本升级要多痛苦。
分享是人类进步的源泉,可参考:
http://blog.csdn.net/ad3600/article/details/54706102
http://blog.csdn.net/tpyangqingyuan/article/details/54574977
这篇关于无人机开发-图传技术的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






