本文主要是介绍第一周铁二战队学习总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
智能车技术报告
- 一、机械结构
- 1.机械结构制作部分的设计原则
- 2.对于舵机的改造
- 3.底盘改造
- 4.前轮定位
- 主销后倾
- 车轮外倾角
- 转向轮前束
- 5.长连杆
- 6.麦克纳姆轮
- 6.斑马线检测传感器原理
- 7.坡道检测传感器原理
- 8.双车接力时测距原理
- 9.车胎处理
- 二、控制软件算法
- 1.对于系统控制总体设计
- 2.巡线原理
- 2.1电磁巡线原理
- 2.2摄像头巡线原理
- 3.赛道元素处理
- 3.1十字处理
- 3.2环岛处理
- 3.3坡道处理
- 4.赛道信息获取
- 4.1电感获取赛道信息
- 4.2摄像头获取赛道信息
- 4.2.1图像处理
- 4.2.2拟合赛道中心线
- 4.3麦克风获取赛道信息
- 5.直立控制
- 总结
- 1.需要对PID算法深入了解
- 2.需要对各种算法均有涉及
- 3.需要学会此文中加粗字体的意思理解及其运用
- 4.需要对各种赛道元素的软件控制均知其原理并深入
- 5.需要对电磁及摄像头获取赛道信息进行学习
- 6.需要熟悉各种数据整合的方法
一、机械结构
1.机械结构制作部分的设计原则
“轻、牢、简”为机械结构的主要原则,且为了提高车模运动性能,对于车轮的位置调整也有很多道理,如车轮前束等。
2.对于舵机的改造
为了提高舵机的反应速度,即在相同的转角下,有尽可能大的线航程,因此需要延长鸵机臂。(但是不知道其原理所在)
3.底盘改造
尽可能的低在保证能通过坡道的情况下,其目的为保证智能车行驶的稳定性。
但不知道为何在没有较多颠簸道路,要将后避震拆除。
4.前轮定位
车模前轮可以可以调整的角度有主销前倾、内倾、前束。且其根本作用为在车辆行驶时,能保证车辆最为稳定。
主销后倾
是指主销装在前轴,上端略向后倾斜,如图。
使车辆转弯时产生的离心力所形成的力矩方向与车轮偏转方向相反,迫使车轮偏转后自动回复到原来的中间位置上。且主销后倾角越大,车速越高,前轮稳定性也越好。
主销内倾与后倾都可使汽车转向自动回正,但主销内倾的回正与车速无关,主销后倾的回正与车速有关。因此高速时后倾作用大,低速内倾回正作用大。
车轮外倾角
是指从前放看前轴时,轮胎的中心平面不是垂直的,而是上面向外倾斜一个角度。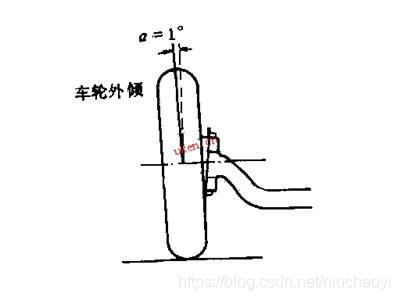
其目的为平衡和协调因为车重造成的前轮内倾倾向,使轮胎和路面呈垂直接触的最佳状态。
转向轮前束
是指前轮前束是指前轮前端面与后端面在汽车横向方向的距离差。
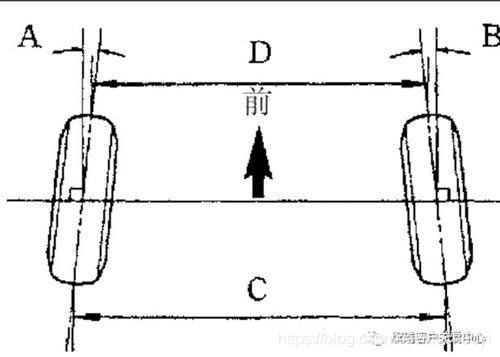
设置前束角的原因为正的前束角在车轮中心产生向内的侧向力,而正的外倾角在车轮中心产生向外的侧向力。因此前束角的作用是与外倾角协调,保持车轮做纯滚动和直线行驶,从而减少轮胎磨损,提高车辆的操纵稳定性。
5.长连杆
因为其优点有:
(1)可以根据所需要的舵机输出杆的长度,从而获得所需要的灵敏度
但不能太长,否则对舵机输出力矩有较高要求。
(2)效率较高。
(3)转角大,由于舵机输出杆的转动在一个平面内,当到达极限位置时,转角比平行四边形大。
(4)转向更灵敏,因为放大倍数比平行四边形方案大。(此处不知平行四边形方案,也查询不到)
6.麦克纳姆轮
通过声音信标组的技术报告,知道麦克纳姆轮具有极高的灵活性。基于有许多小滚轮位于机轮周边的轮轴的中心轮的原理。
6.斑马线检测传感器原理
当传感器检测到黑色遮挡物时输出高电平,单片机通过检测高电平引发系统中断。
7.坡道检测传感器原理
当传感器检测到满足强度阈值的遮挡物引发系统中断。
8.双车接力时测距原理
采用超声波测距,需要将超声波发射端朝向地面防止误触发。
9.车胎处理
根据西南石油大学经验得,在高速情况下,当小车过弯时轮胎容易外翻,这样车模就不能提供车模转弯时所需要的向心力,车模已出现滑出跑道及漂移现象。
西南石油大学解决方案为将轮胎边缘和轮子边缘固定。
因未实践,故难以理解,但可作为经验学习。
二、控制软件算法
1.对于系统控制总体设计
了解到控制转向不仅需要舵机转向,还需要电机的两个轮子的差值。(目前原因未知,猜想为可以使其在最短距离实现转向)
2.巡线原理
2.1电磁巡线原理
比赛中的两种磁场,其一为作为起跑线的固定磁场,其为由永磁铁产生;其二为100mA交变电流的导线所产生的电磁场。
交变电信号产生交变磁场,由于交变磁场在电感线圈中可以产生与磁场强度相关的电流。于是通过三个水平放置的电感值来判断路况,从而控制鸵机的打角大小及拐弯电机的差速大小。
2.2摄像头巡线原理
比赛的环境是在蓝色背景布上铺设白色赛道,使赛道差距明显。
可通过摄像头采集图像,但为了适应不同的场地出现的亮暗差距不同,可使用动态阈值对图像进行二值化,寻找像素点中的颜色跳变点(如灰度图下,由黑到白的跳变点),并对跳变点的行列坐标进行运算,得到每一行的中点列坐标,通过每一行的中点列坐标与直到上的中点列坐标做差,后进行累加,可得到偏差值,通过偏差值控制舵机的打角大小及拐弯电机的差速大小。
当赛场上光线不均匀时,可以对摄像头加偏光镜使对比度更加明显。
3.赛道元素处理
3.1十字处理
通过摄像头来判断是否遇到十字,即通过遍历图像数组,当全部为白色像素点的行数大于一定值,即可判断遇到了十字。
在过十字时,采用斜率补线的方式,且同时使用电磁导引和摄像头导引,将两者误差进行权重分配,即可通过。
不单独采用摄像头的原因,图像左下方与右下方提取不到边界点,导致车模跑错。
3.2环岛处理
采用电磁判断环岛标志位,当经过环岛时水平电感会增大,可设置三个水平电感,当三个电感的和大于阈值,判断前方为环岛。使用电磁导引进入环岛,当完全进入环岛后,开启摄像头导引,即将出环时,使用电磁导引。
3.3坡道处理
通过使用加速度计和陀螺仪来共同判断是否进入坡道,将加速度计值与陀螺仪计值进行卡尔曼滤波,来得到真实角度值,当真实值大于阈值,即为上坡状态。
由于上坡车模存在倾角,摄像头会获取干扰信息,因此在判断为坡道后,应关闭摄像头。
此方法存在的问题,由于导引的方式切换,会导致偏差值存在突变。
4.赛道信息获取
4.1电感获取赛道信息
由于电感、匹配质量无法保证完全相同,需要对采集的电感值进行一次归一,即除以本身在直到上采集的最大值,需保证电感最后得到的数据的相对变化范围一致。
由电子科技大学的经验得,单次采集到的电感值可能会因为抖动等影响,导致采集到的值被干扰,电子科技大学做法为代码中利用滑动平均滤波法,滑动20次获得最终数据。
4.2摄像头获取赛道信息
4.2.1图像处理
利用彩色摄像头获取彩色图像,再将RGB图像转换为灰度图像。再利用大津法二值化,将灰度图转化为二值化图像。
由电子科技大学双车可知,由彩色摄像头获取彩色图像,再将彩色图像转灰度的原因为,RGB有三个通道信息,灰度摄像头只有一个通道信息。在某些恶劣情况下,如反光赛道,三个通道的RGB图像更能保留正确信息。
4.2.2拟合赛道中心线
共有三种情况:
(1)左右边界线均存在:利用已知点进行最小二乘法拟合出所有中心点。
(2)单边丢线:利用仅存在的边界线,向中间偏移路宽。
(3)双边丢线:不可能拟合出赛道中心线,判定为丢线,此时需换为电磁跑。
4.3麦克风获取赛道信息
利用传感器接收利用调频广播中的CHIRP信号,用驻极体话筒接收在空气中传播的CHIRP声音信号。
5.直立控制
需通过姿态传感器的信息采集,经过互补滤波之后,得到智能车的俯仰角及其数据,采用PD控制对内环速度环和外环速度环。
总结
1.需要对PID算法深入了解
原因:否则无法处理其不足之处,即积分截断效应大,有静态误差;溢出的影响大。
2.需要对各种算法均有涉及
3.需要学会此文中加粗字体的意思理解及其运用
4.需要对各种赛道元素的软件控制均知其原理并深入
5.需要对电磁及摄像头获取赛道信息进行学习
大致为如何进项赛道信息运用及分析
6.需要熟悉各种数据整合的方法
这篇关于第一周铁二战队学习总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







