本文主要是介绍stm32野火指南者\霸道串口通信USART,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、STM32串口通信
通用同步异步收发器(Universal Synchronous Asynchronous Receiver and Transmitter),简称USART,是一个串行通信设备,可以灵活地与外部设备进行全双工数据交换。
有别于 USART 还有一个\nUART(Universal Asynchronous Receiver and Transmitter),它是在 USART 基础上裁剪掉了同步通信功能,只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是 UART。
\n串行通信一般是以帧格式传输数据,即是一帧一帧的传输,每帧包含有起始信号、数\n据信息、停止信息,可能还有校验信息。USART 就是对这些传输参数有具体规定,当然也\n不是只有唯一一个参数值,很多参数值都可以自定义设置,只是增强它的兼容性。
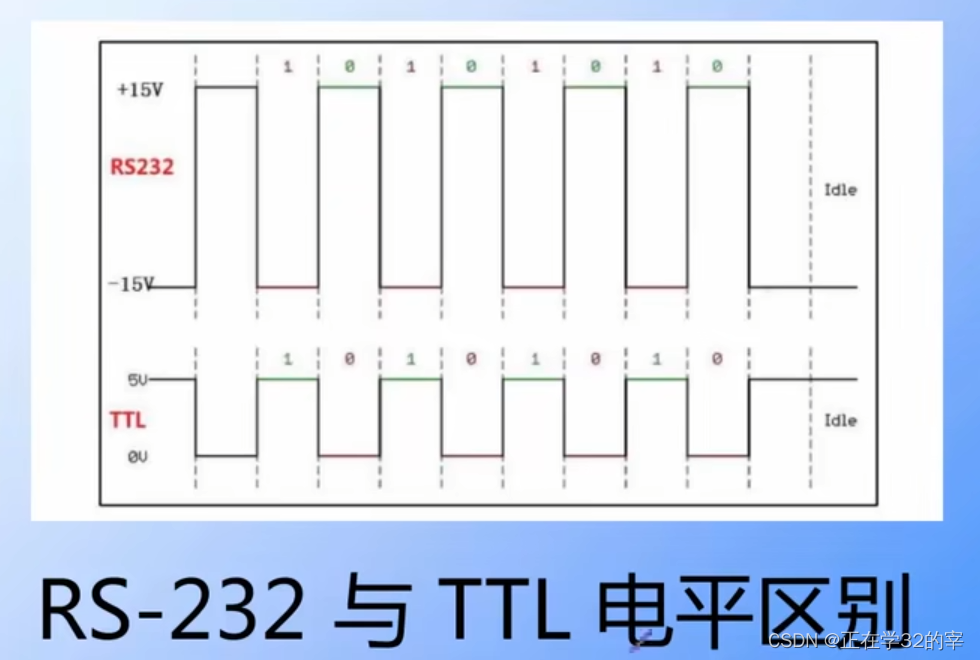
1.RS323标准
2.USB转串口(TTL)
3.串口转串口
二、状态寄存器(USART_SR)简介
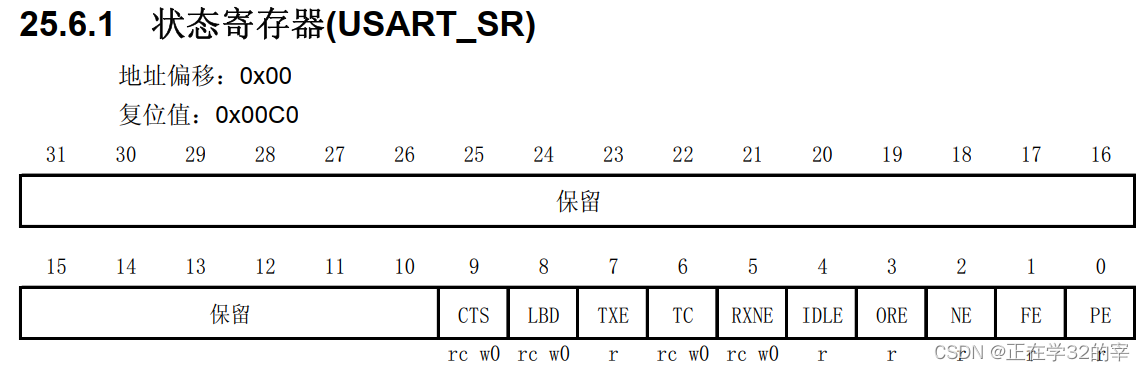
位7 TXE:发送数据寄存器空 (Transmit data register empty)
如果USART_CR1寄存器中的TXEIE为1,则产生中断。对USART_DR的写操作,将该位清零。
0:数据还没有被转移到移位寄存器;
1:数据已经被转移到移位寄存器。
位6 TC:发送完成 (Transmission complete)
0:发送还未完成;
1:发送完成。
位5 RXNE:读数据寄存器非空 (Read data register not empty)
0:数据没有收到;
1:收到数据,可以读出。
三、USART1寄存器简介
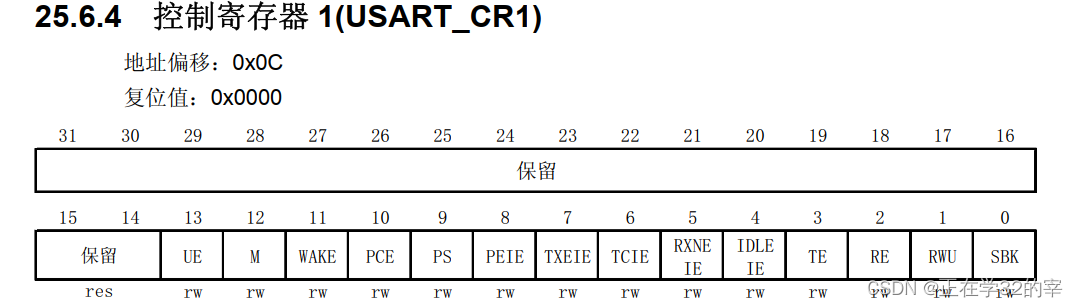
位13:UE 串口使能(USART ENABLE)
0: USART分频器和输出被禁止;
1: USART模块使能。
位12: M 字长 (Word length)
该位定义了数据字的长度,由软件对其设置和清零
0:一个起始位, 8个数据位, n个停止位;
1:一个起始位, 9个数据位, n个停止位
位10 PCE:检验控制使能 (Parity control enable)
用该位选择是否进行硬件校验控制(对于发送来说就是校验位的产生;对于接收来说就是校验位的检测)。当使能了该位,在发送数据的最高位(如果M=1,最高位就是第9位;如果M=0,最高位就是第8位)插入校验位;对接收到的数据检查其校验位。软件对它置’1’或清’0’。一旦设置了该位,当前字节传输完成后,校验控制才生效。
0:禁止校验控制;
1:使能校验控制。
位9 PS:校验选择 (Parity selection)
当校验控制使能后,该位用来选择是采用偶校验还是奇校验。软件对它置’1’或清’0’。当前字节传输完成后,该选择生效。
0:偶校验;
1:奇校验。
位8 PEIE: PE中断使能 (PE interrupt enable)
该位由软件设置或清除。
0:禁止产生中断;
1:当USART_SR中的PE为’1’时,产生USART中断
位3 TE:发送使能 (Transmitter enable)
该位使能发送器。该位由软件设置或清除。
0:禁止发送;
1:使能发送。
位2 RE:接收使能 (Receiver enable)
0:禁止接收;
1:使能接收,并开始搜寻RX引脚上的起始位。
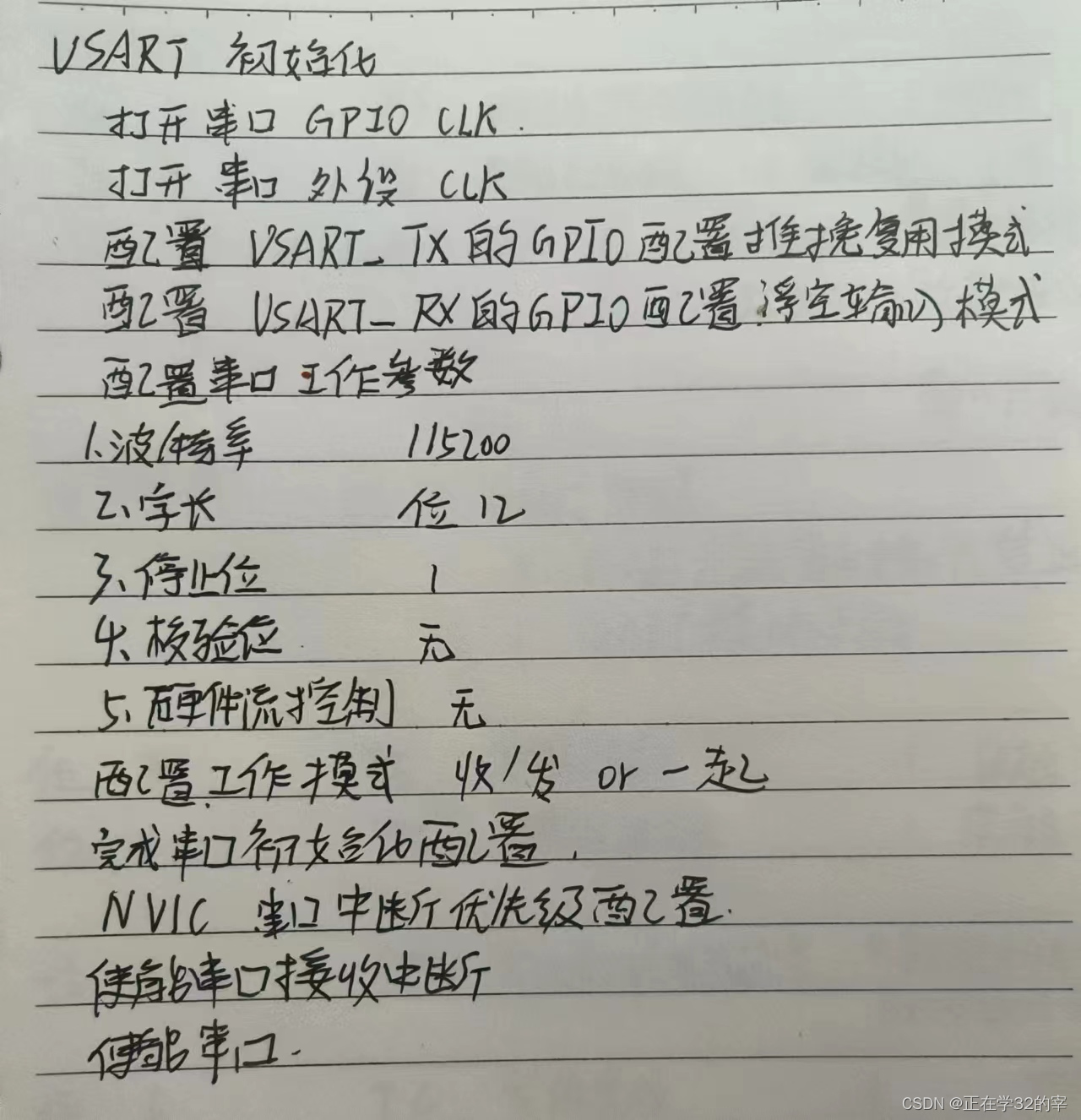
四、USART 初始化步骤
五、USART1代码
1.bsp_usart.c代码如下:
#include "bsp_usart.h"static void NVIC_Configuration(void)
{NVIC_InitTypeDef NVIC_InitStructure;/* 嵌套向量中断控制器组选择 *//* 提示 NVIC_PriorityGroupConfig() 在整个工程只需要调用一次来配置优先级分组*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);/* 配置USART为中断源 */NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;/* 抢断优先级*/NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;/* 子优先级 */NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;/* 使能中断 */NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;/* 初始化配置NVIC */NVIC_Init(&NVIC_InitStructure);
}void USART_Config(void)
{GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;// 打开串口GPIO的时钟DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);// 打开串口外设的时钟DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);// 将USART Tx的GPIO配置为推挽复用模式GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);// 将USART Rx的GPIO配置为浮空输入模式GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);// 配置串口的工作参数// 配置波特率USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;// 配置 针数据字长USART_InitStructure.USART_WordLength = USART_WordLength_8b;// 配置停止位USART_InitStructure.USART_StopBits = USART_StopBits_1;// 配置校验位USART_InitStructure.USART_Parity = USART_Parity_No ;// 配置硬件流控制USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;// 配置工作模式,收发一起USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;// 完成串口的初始化配置USART_Init(DEBUG_USARTx, &USART_InitStructure);// 串口中断优先级配置NVIC_Configuration();// 使能串口接收中断USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE); // 使能串口USART_Cmd(DEBUG_USARTx, ENABLE);
}
2.bsp_usart.h代码如下:
#ifndef __BSP_USART_H
#define __BSP_USART_H
#include "stm32f10x.h"
// 串口1-USART1
#define DEBUG_USARTx USART1
#define DEBUG_USART_CLK RCC_APB2Periph_USART1
#define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10#define DEBUG_USART_IRQ USART1_IRQn
#define DEBUG_USART_IRQHandler USART1_IRQHandlervoid USART_SendByte(USART_TypeDef* pUSARTx,uint8_t Data);
void USART_SendHalfByte(USART_TypeDef* pUSARTx,uint16_t Data);
void USART_SendArray(USART_TypeDef* pUSARTx,uint8_t *array,uint8_t num);
void USART_SendStr(USART_TypeDef* pUSARTx,uint8_t *str);#endif /*BSP_USART*/
3.发送代码如下:
//发送1个字节
void USART_SendByte(USART_TypeDef* pUSARTx,uint8_t Data)
{USART_SendData(pUSARTx,Data);while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TXE)==RESET);
}//发送2个字节
void USART_SendHalfByte(USART_TypeDef* pUSARTx,uint16_t Data)
{uint8_t temp_h,temp_l;temp_h = (Data&0xff00)>>8;temp_l = (Data&0xff);USART_SendData(pUSARTx,temp_h);while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TXE)==RESET);USART_SendData(pUSARTx,temp_l);while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TXE)==RESET);
}//发送8位数据的数组
void USART_SendArray(USART_TypeDef* pUSARTx,uint8_t *array,uint8_t num)
{uint8_t i;for(i=0;i<num;i++){USART_SendByte(pUSARTx,array[i]);while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET);}}//发送字符串
void USART_SendStr(USART_TypeDef* pUSARTx,uint8_t *str)
{uint8_t i=0;do{USART_SendByte(pUSARTx,*(str+i));i++;}while(*(str+i)!='\0');while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET);
}//重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{/* 发送一个字节数据到串口 */USART_SendData(DEBUG_USARTx, (uint8_t) ch);/* 等待发送完毕 */while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET); return (ch);
}//重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{/* 等待串口输入数据 */while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);return (int)USART_ReceiveData(DEBUG_USARTx);
}
这篇关于stm32野火指南者\霸道串口通信USART的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



