本文主要是介绍RT-Thread 启动流程,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
RT-Thread 启动流程
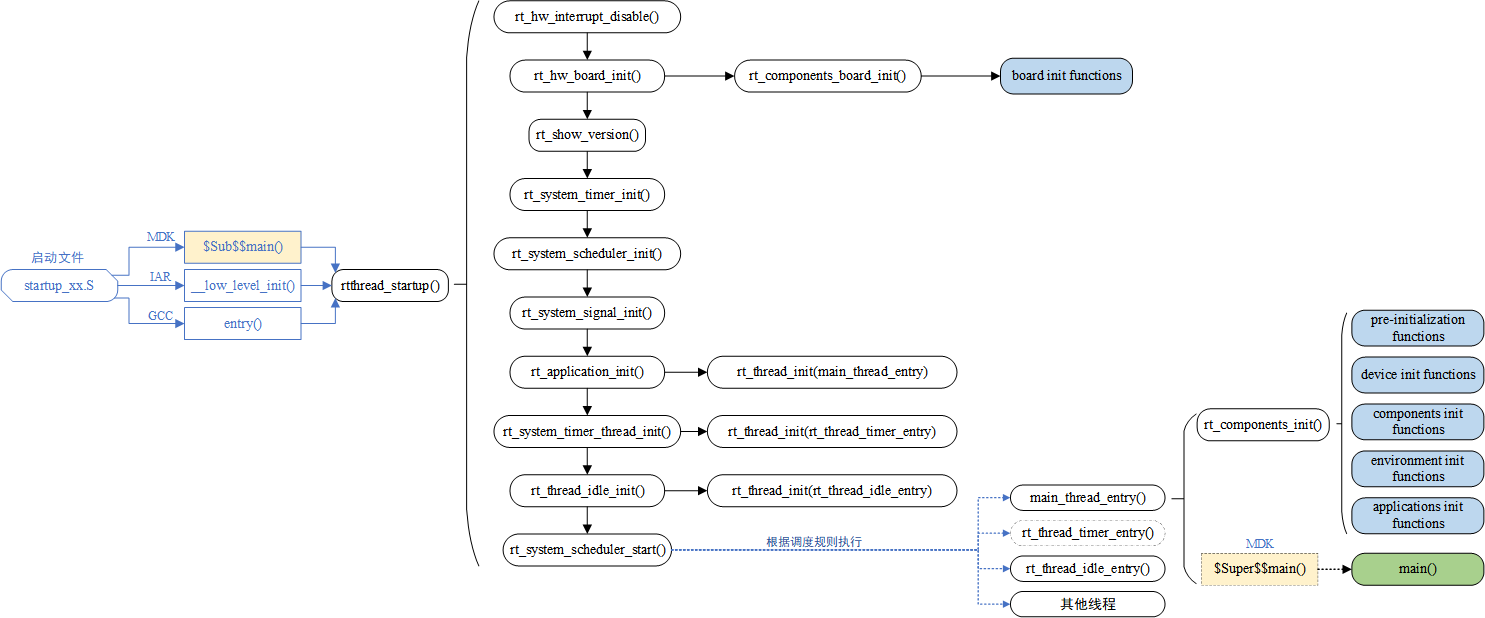
一般了解一份代码大多从启动部分开始,同样这里也采用这种方式,先寻找启动的源头。RT-Thread 支持多种平台和多种编译器,而 rtthread_startup() 函数是 RT-Thread 规定的统一启动入口。一般执行顺序是:系统先从启动文件开始运行,然后进入 RT-Thread 的启动函数 rtthread_startup() ,最后进入用户入口函数 main(),如下图所示:
以 MDK-ARM 为例,用户程序入口为 main() 函数,位于 main.c 文件中。系统启动后先从汇编代码 startup_stm32f103xe.s 开始运行,然后跳转到 C 代码,进行 RT-Thread 系统启动,最后进入用户程序入口函数 main()。
为了在进入 main() 之前完成 RT-Thread 系统功能初始化,我们使用了 MDK 的扩展功能 $Sub$$ 和 $Super$$。可以给 main 添加 $Sub$$ 的前缀符号作为一个新功能函数 $Sub$$main,这个 $Sub$$main 可以先调用一些要补充在 main 之前的功能函数(这里添加 RT-Thread 系统启动,进行系统一系列初始化),再调用 $Super$$main 转到 main() 函数执行,这样可以让用户不用去管 main() 之前的系统初始化操作。
关于 $Sub$$ 和 $Super$$ 扩展功能的使用,详见 ARM® Compiler v5.06 for µVision®armlink User Guide。
下面我们来看看在 components.c 中定义的这段代码:
/* $Sub$$main 函数 */
int $Sub$$main(void)
{rtthread_startup();return 0;
}
在这里 $Sub$$main 函数调用了 rtthread_startup() 函数,其中 rtthread_startup() 函数的代码如下所示:
int rtthread_startup(void)
{rt_hw_interrupt_disable();/* 板级初始化:需在该函数内部进行系统堆的初始化 */rt_hw_board_init();/* 打印 RT-Thread 版本信息 */rt_show_version();/* 定时器初始化 */rt_system_timer_init();/* 调度器初始化 */rt_system_scheduler_init();#ifdef RT_USING_SIGNALS/* 信号初始化 */rt_system_signal_init();
#endif/* 由此创建一个用户 main 线程 */rt_application_init();/* 定时器线程初始化 */rt_system_timer_thread_init();/* 空闲线程初始化 */rt_thread_idle_init();/* 启动调度器 */rt_system_scheduler_start();/* 不会执行至此 */return 0;
}复制错误复制成功这部分启动代码,大致可以分为四个部分:
(1)初始化与系统相关的硬件;
(2)初始化系统内核对象,例如定时器、调度器、信号;
(3)创建 main 线程,在 main 线程中对各类模块依次进行初始化;
(4)初始化定时器线程、空闲线程,并启动调度器。
启动调度器之前,系统所创建的线程在执行 rt_thread_startup() 后并不会立马运行,它们会处于就绪状态等待系统调度;待启动调度器之后,系统才转入第一个线程开始运行,根据调度规则,选择的是就绪队列中优先级最高的线程。
rt_hw_board_init() 中完成系统时钟设置,为系统提供心跳、串口初始化,将系统输入输出终端绑定到这个串口,后续系统运行信息就会从串口打印出来。
main() 函数是 RT-Thread 的用户代码入口,用户可以在 main() 函数里添加自己的应用。
int main(void)
{/* user app entry */return 0;
}这篇关于RT-Thread 启动流程的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





