本文主要是介绍Kafka的Broker运行机制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1.Zookeeper整体数据
2.Controller Broker选举机制
3.Leader Partition选举机制
4.Leader Partition自平衡机制
5.Partition故障恢复机制
6.HW一致性保障-Epoch更新机制
总结
Kafka依赖很多的存储数据,但是,总体上是有划分的。Kafka将状态信息保存在Zookeeper中,通过Zookeeper中的数据,指导每个Kafka与其他Kafka节点不同的业务逻辑。而将状态信息抽离后,剩下的数据,就可以直接存到Kafka本地,所有Kafka服务都以相同的逻辑运行。这种状态信息分离的设计,让Kafka有非常好的集群扩展性。
本章主要讲解如何保证Partition的消息一致性。
1.Zookeeper整体数据
Zookeeper的Watcher机制也可以很好的减少Broker读取Zookeeper的次数。
Kafka的集群中,最为主要的状态信息有两个。一个是在多个Broker中,需要选举出一个Broker,担任Controller角色。由Controller角色来管理整个集群中的分区和副本状态。另一个是在同一个Topic下的多个Partition中,需要选举出一个Leader角色。由Leader角色的Partition来负责与客户端进行数据交互。
这些状态信息都被Kafka集群注册到了Zookeeper中。Zookeeper数据整体如下图:
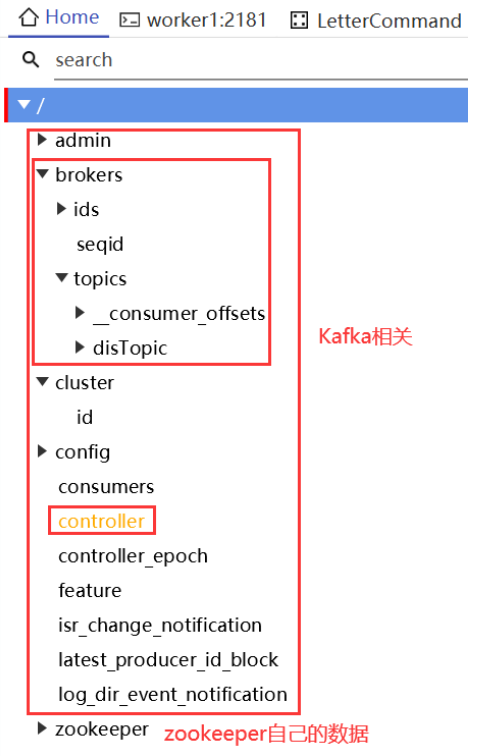
brokers/ids下,会记录集群中的所有BrokerId;/topics目录下,会记录当前Kafka的Topic相关的Partition分区等信息。
例如集群中每个Broker启动后,都会往Zookeeper注册一个临时节点/broker/ids/{BrokerId}。如果启动了Zookeeper和Kafka后,服务器非正常关机,这时Zookeeper上的这个临时节点就不会注销。下次重新启动Kafka时,就有可能因为无法注册上这个临时节点而报错。
2.Controller Broker选举机制
选举Controller的过程就是通过抢占Zookeeper的/controller节点来实现的。Zookeeper会保证在一个集群中,只会有一个broker能够成功创建这个节点,这个注册成功的broker就成了集群当中的Controller节点。
当一个应用在Zookeeper上创建了一个临时节点后,Zookeeper需要这个应用一直保持连接状态。如果Zookeeper长时间检测不到应用的心跳信息,就会删除临时节点。同时,Zookeeper还允许应用监听节点的状态,当应用状态有变化时,会向该节点对应的所有监听器广播节点变化事件。
这样,如果集群中的Controller节点服务宕机了,Zookeeper就会删除/controller节点。而其他未注册成功的Broker节点,就会感知到这一事件,然后开始竞争,再次创建临时节点。这就是Kafka基于Zookeeper的Controller选举机制。
Controller Broker的作用:
- 监听Zookeeper中的/brokers/ids节点,感知Broker增减变化。
- 监听/brokers/topics,感知topic以及对应的partition的增减变化。
- 监听/admin/delete_topic节点,处理删除topic的动作。
- Controller还需要负责将元数据推送给其他Broker。
3.Leader Partition选举机制
在Kafka中,一个Topic下的所有消息,是分开存储在不同的Partition中的。在使用kafka-topics.sh脚本创建Topic时,可以通过--partitions 参数指定Topic下包含多少个Partition,还可以通过--replication-factors参数指定每个Partition有几个备份。而在一个Partition的众多备份中,需要选举出一个Leader Partition,负责对接所有的客户端请求,并将消息优先保存,然后再通知其他Follower Partition来同步消息。
几个重要的概念:
- AR: Assigned Repllicas。 表示Kafka分区中的所有副本(存活的和不存活的)
- ISR: 表示在所有AR中,服务正常,保持与Leader同步的Follower集合。如果Follower长时间没有向Leader发送通信请求(超时时间由replica.lag.time.max.ms参数设定,默认30S),那么这个Follower就会被提出ISR中。(在老版本的Kafka中,还会考虑Partition与Leader Partition之间同步的消息差值,大于参数replica.lag.max.messages条就会被移除ISR。现在版本已经移除了这个参数。)
- OSR:表示从ISR中踢出的节点。记录的是那些服务有问题,延迟过多的副本。
他们都被记录在Zookeeper中。
Leader选举机制:在选举Leader Partition时,会按照AR中的排名顺序,靠前的优先选举。只要当前Partition在ISR列表中,也就是是存活的,那么这个节点就会被选举成为Leader Partition。
Leader Partitoin选举机制能够保证每一个Partition同一时刻有且仅有一个Leader Partition。但是,是不是只要分配好了Leader Partition就够了呢?当然不是。重新选举Leader后,可能会导致过多的Leader集中在同一Broker上,从而导致这个Broker的压力过大。
4.Leader Partition自平衡机制
默认情况下,Kafka会尽量将Leader Partition分配到不同的Broker节点上,用以保证整个集群的性能压力能够比较平均。
但是,经过Leader Partition选举后,这种平衡就有可能会被打破,让Leader Partition过多的集中到同一个Broker上。这样,这个Broker的压力就会明显高于其他Broker,从而影响到集群的整体性能。
Kafka的自平衡机制:
Kafka会认为AR当中的第一个节点就应该是Leader节点,这种选举结果成为preferred election理想选举结果。Controller会定期检测集群的Partition平衡情况,在开始检测时,Controller会依次检查所有的Broker。当发现这个Broker上的不平衡的Partition比例高于leader.imbalance.per.broker.percentage阈值时,就会触发一次Leader Partiton的自平衡。
注意:Leader Partition自平衡的过程是一个非常重要的操作,因为要涉及到大量消息的转移与同步。并且,在这个过程中,会有丢消息的可能。所以在很多对性能要求比较高的线上环境,会选择将参数auto.leader.rebalance.enable设置为false,关闭Kafka的Leader Partition自平衡操作,而用其他运维的方式,在业务不繁忙的时间段,手动进行Leader Partiton自平衡,尽量减少自平衡过程对业务的影响。
5.Partition故障恢复机制
Kafka为了保证消息能够在多个Parititon中保持数据同步,内部记录了两个关键的数据:
- LEO(Log End Offset): 每个Partition的最后一个Offset
每个Partition都会记录自己保存的消息偏移量。leader partition收到并记录了生产者发送的一条消息,就将LEO加1。而接下来,follower partition需要从leader partition同步消息,每同步到一个消息,自己的LEO就加1。通过LEO值,就知道各个follower partition与leader partition之间的消息差距。
- HW(High Watermark): 一组Partiton中最小的LEO
follower partition每次往leader partition同步消息时,都会同步自己的LEO给leader partition。这样leader partition就可以计算出这个HW值,并最终会同步给各个follower partition。leader partition认为这个HW值以前的消息,都是在所有follower partition之间完成了同步的,是安全的。这些安全的消息就可以被消费者拉取过去了。而HW值之后的消息,就是不安全的,是可能丢失的。这些消息如果被消费者拉取过去消费了,就有可能造成数据不一致。
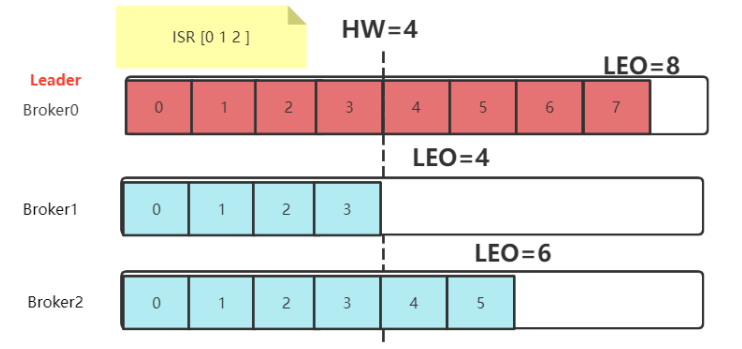
在所有服务都正常的情况下,当一个消息写入到Leader Partition后,并不会立即让消费者感知。而是会等待其他Follower Partition同步。这个过程中就会推进HW。当HW超过当前消息时,才会让消费者感知。比如在上图中,4号往后的消息,虽然写入了Leader Partition,但是消费者是消费不到的。
当服务出现故障时,如果是Follower发生故障,这不会影响消息写入,只不过是少了一个备份而已。处理相对简单一点。
- 将故障的Follower节点临时剔除ISR集合。而其他Leader和Follower继续正常接收消息。
- 出现故障的Follower节点恢复后,不会立即加入ISR集合。该Follower节点会读取本地记录的上一次的HW,将自己的日志中高于HW的部分信息全部删除掉,然后从HW开始,向Leader进行消息同步。
- 等到该Follower的LEO大于等于整个Partiton的HW后,就重新加入到ISR集合中。这也就是说这个
Follower的消息进度追上了Leader。
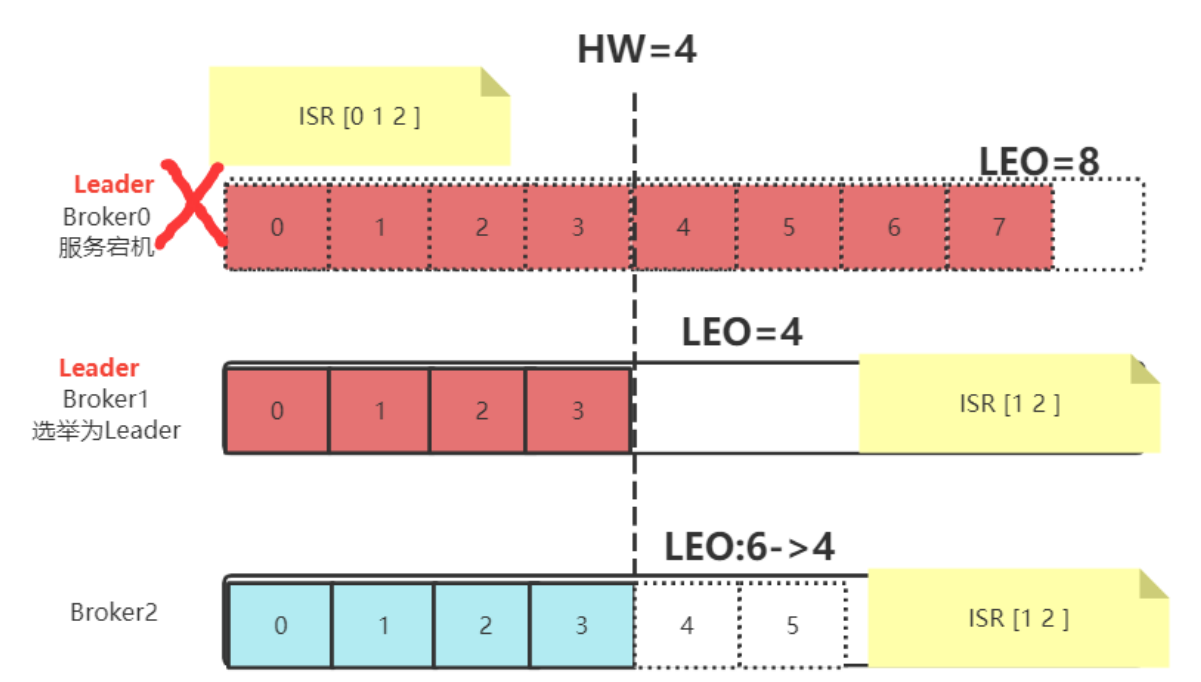
如果是Leader节点出现故障,Kafka为了保证消息的一致性,处理就会相对复杂一点。
- Leader发生故障,会从ISR中进行选举,将一个原本是Follower的Partition提升为新的Leader。这时,消息有可能没有完成同步,所以新的Leader的LEO会低于之前Leader的LEO。
- Kafka中的消息都只能以Leader中的备份为准。其他Follower会将各自的Log文件中高于HW的部分全部清理掉,然后从新的Leader中同步数据。
- 旧的Leader恢复后,将作为Follower节点,进行数据恢复。
Kafka注重的是保护多个副本之间的数据一致性。但是这样,消息的安全性就得不到保障。例如在下图中,原本Partition0中的4,5,6,7号消息就被丢失掉了。
这个机制中有一个很重要的前提,就是各个Broker中记录的HW是一致的。但是HW和LEO同样是一个分布式的值,怎么保证HW在多个Broker中是一致的呢?答案是,没法保证,所以引入了Epoch机制。
6.HW一致性保障-Epoch更新机制
实际上,HW值在一组Partition里并不是总是一致的。
Follower Partition的HW更新的流程:
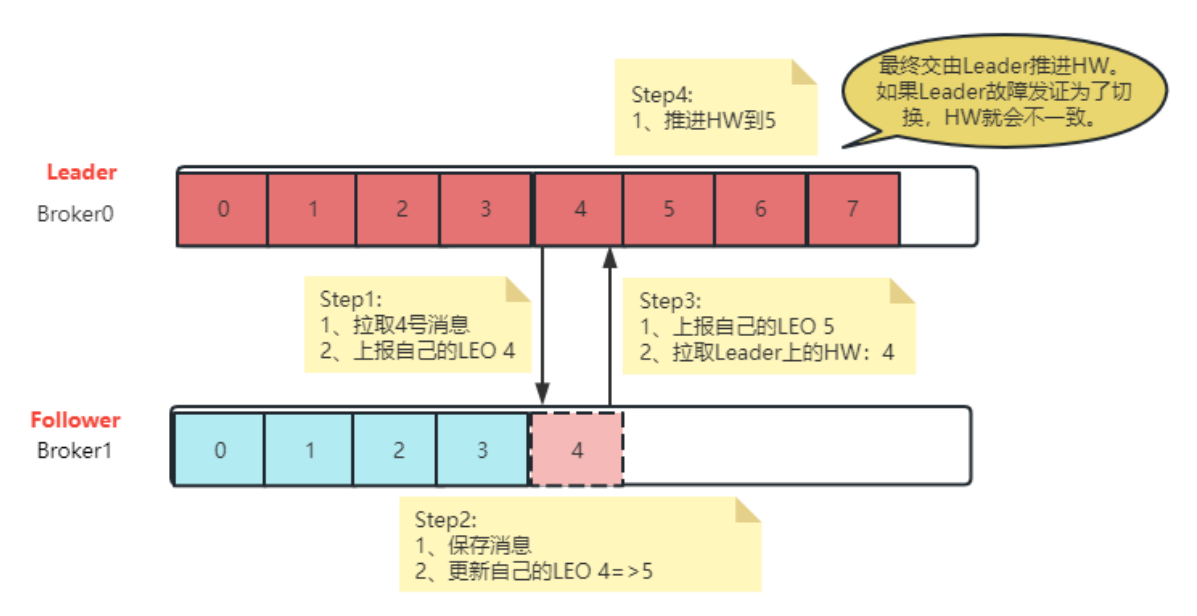
对于Follower Partition,他需要先将消息从Leader Partition拉取到本地,才能向Leader Partition上报LEO值。所有Follower Partition上报后,Leader Partition才能更新HW的值,然后Follower Partition在下次拉取消息时,才能更新HW值。
所以,Leader Partiton的LEO更新和Follower Partition的LEO更新,在时间上是有延迟的。这也导致了Leader Partition上更新HW值的时刻与Follower Partition上更新HW值的时刻,是会出现延迟的。这样,如果有多个Follower Partition,这些Partition保存的HW的值是不统一的。当然,如果服务一切正常,最终Leader Partition还是会正常推进HW,能够保证HW的最终一致性。但是,当Leader Partition出现切换,所有的Follower Partition都按照自己的HW进行数据恢复,就会出现数据不一致的情况。
Kafka还设计了Epoch机制,来保证HW的一致性。
- Epoch是一个单调递增的版本号,每当Leader Partition发生变更时,该版本号就会更新。所以,当有多个Epoch时,只有最新的Epoch才是有效的,而其他Epoch对应的Leader Partition就是过期的,无用的Leader。
- 每个Leader Partition在上任之初,都会新增一个新的Epoch记录。这个记录包含更新后的epoch版本号,以及当前Leader Partition写入的第一个消息的偏移量。例如(1,100)。表示epoch版本号是1,当前Leader Partition写入的第一条消息是100,Broker会将这个epoch数据保存到内存中,并且会持久化到本地一个leader-epoch-checkpoint文件当中。
- 这个leader-epoch-checkpoint会在所有Follower Partition中同步。当Leader Partition有变更时,新的Leader Partition就会读取这个Epoch记录,更新后添加自己的Epoch记录。
- 接下来其他Follower Partition要更新数据时,就可以不再依靠自己记录的HW值判断拉取消息的起点。而可以根据这个最新的epoch条目来判断。(从新Leader写的第一条数据开始更新)
总结
Kafka其实天生就是为了集群而生,即使单个节点运行Kafka,他其实也是作为一个集群运行的。而Kafka为了保证在各种网络抽风,服务器不稳定等复杂情况下,保证集群的高性能,高可用,高可扩展三高,做了非常多的设计。
这篇关于Kafka的Broker运行机制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




