本文主要是介绍无霍尔BLDC驱动,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目前主要的无霍尔控制方案是基于反电势检测信 息判断换相点,本文研究反电势在 PWM - OFF 点的检 测方案确定换相点。
1. 反电动势检测方案
BLDC 的模型做等效,将线圈阻抗看成是一个 线性电阻和一个储能电感的等效,其等效电路图如图 1所示。
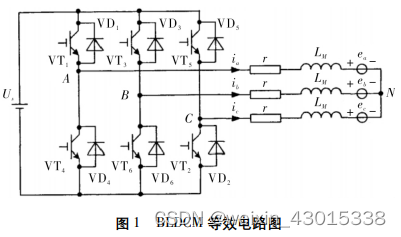
电机三相绕组输出端电压的电压方程组为
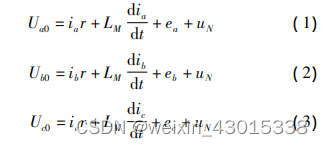
式中,LM = L - M; Ua0、Ub0和 Uc0为三相绕组输出端对直 流电源地的电压。ea、eb、ec 为 A、B、C 三相绕组的反电 动势; ia、ib、ic 为 A、B、C 三相绕组的相电流; uN 为三相 绕组中性点 N 对电源地的电压,r 为每相绕组的电阻。 反电势过零检测判断换相点的原理如图 2 所示。
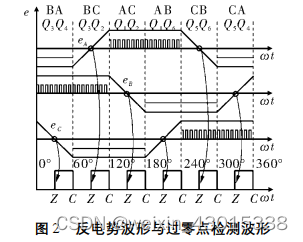
在检测到过零点之后做一个信号翻转,可见过零 点和换相点之间有一个 30°的相位差,即在文中检测 到反电势过零点事件后,再延迟 30°电角度的时间便 启动换相,这样就实现了电机的驱动。 在 PWM - OFF 时刻采样端电压,其电路原理如 图 3所示。
这篇关于无霍尔BLDC驱动的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









