本文主要是介绍STM32多功能交通灯系统:从原理到实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

一、功能说明
本交通灯系统采用先进的stm32f103c8t6微处理器为核心控制单元。系统设置东南西北四个方向各配置两位数码管,用以精准展示5至99秒的时间范围,并且允许用户根据实际需求进行灵活调整。
在信号灯配置方面,每个方向均配备左转、直行、黄灯和红灯共计四个灯,以确保交通信号的有效传递。同时,南北方向和东西方向均安装红外对管装置,分别用于实时监测车流量,为交通管理提供重要数据支持。
此外,本系统还设置紧急按钮功能。一旦触发紧急按钮,系统将立即响应,将行车方向的所有信号灯切换为红灯状态,同时人行道方向信号灯全部转为绿灯状态,以确保紧急情况下的交通安全。紧急模式可通过再次按下紧急按钮解除。
在时间调整方面,本系统具备智能化管理能力,能够根据实时监测到的车流量数据,进行动态调整,以实现交通流的高效管理和优化。
综上所述,本交通灯系统通过严谨、稳重的设计,以及理性的管理策略,为提升道路交通安全性与通行效率提供了有力保障。
二、硬件设计
2.1 原理框图
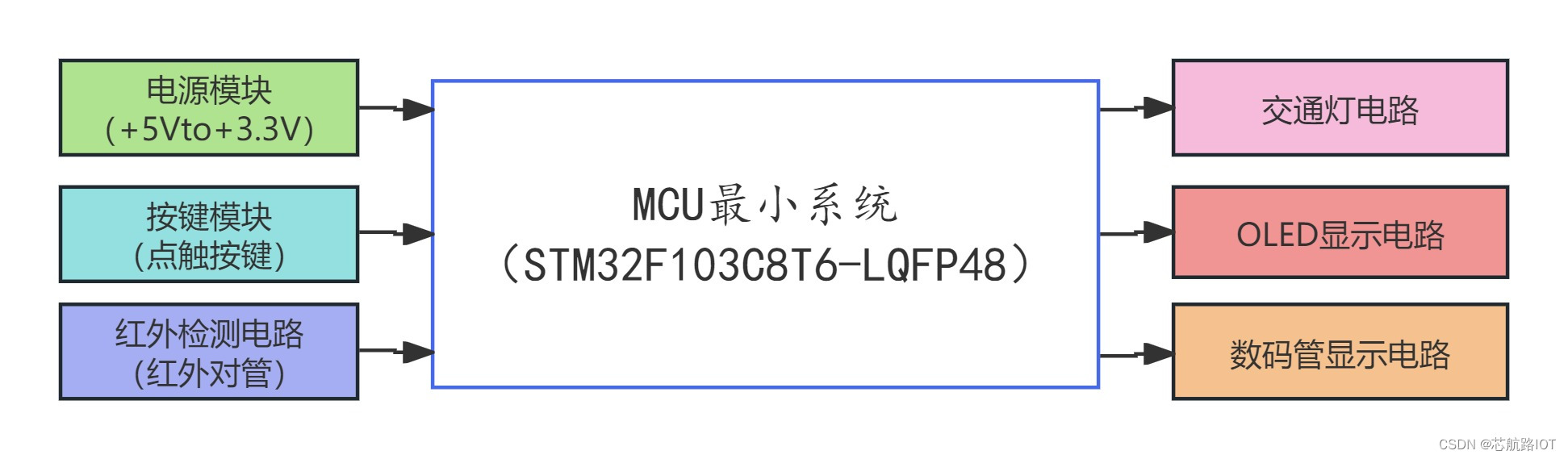
2.2 各功能框图说明
2.2.1 MCU最小系统
1、该MCU采用了ST的STM32F103C8T6 LQFP48封装,以下是其主要特点:
核心:采用ARM® Cortex®-M3 32位RISC核心,最高频率可达72MHz。
存储器:提供64K字节的Flash存储器和20K字节的SRAM。
电源管理:支持2.0至3.6V的应用供电和I/Os,具有POR、PDR和可编程电压检测器(PVD)。
低功耗模式:包括睡眠、停止和待机模式,适合设计低功耗应用。
丰富的外设:提供两个12位ADC,三个通用16位定时器加一个PWM定时器,以及标准和高级通信接口:最多两个I2C和SPIs,三个USARTs,一个USB和一个CAN。

2、在单片机每个电源输入部分增加一个100nF的旁路电容,其主要功能包括:
a) 滤除电源上的高频噪声。
b) 储能,当负载需要瞬时电流时,电容率先为其提供电流,减小电源产生的波动。
c) 给高频信号提供最近的低阻抗回流路径,减少对其他芯片电源的干扰。
3、BOOT0和BOOT1的作用:
这两个引脚在芯片复位时的电平状态决定了芯片复位后从哪个区域开始执行程序。
用户可以通过设置BOOT1和BOOT0引脚的状态来选择在复位后的启动模式。
三种启动模式:
Flash memory启动方式(BOOT0 = 0):默认情况下,芯片从内置Flash启动。这是最常用的模式,我们通常使用JTAG或SWD模式下载程序到Flash中,重启后直接从Flash启动。
System memory启动方式(BOOT0 = 1,BOOT1 = 0):从系统存储器启动,这种模式的功能由厂家设置。系统存储器是芯片内部的特定区域,出厂时预置了一个BootLoader,用于串口下载程序到Flash中。这种模式用得较少。
SRAM启动方式(BOOT0 = 1,BOOT1 = 1):从内置SRAM启动,用于程序调试。在这种模式下,代码存储在SRAM中,适用于快速的程序调试。
4、晶振电路
晶体采用8MHz,并联22pf电容,电容与晶振一起形成一个振荡回路,其值需要与晶振的指定负载电容相匹配,以确保晶振在正确的频率下稳定工作。
1M电阻的作用
提供启动振荡:1MΩ电阻有助于晶体振荡器在上电时能够迅速启动振荡。它通过提供一个初始的反馈路径来实现这一点,尤其是在环境温度较低时,晶体振荡器可能更难启动。
增加负性阻抗:并联的1MΩ电阻可以增加电路中的负性阻抗(-R),这有助于提高电路的增益。在没有足够增益的条件下,晶体振荡器可能不会启动。
抑制噪声:这个电阻还可以起到抑制共模噪声的作用,提高系统的抗干扰能力。它有助于减少由于电源线或其他干扰源引入的噪声,从而使晶体振荡器的输出更加稳定。
减少谐波振荡:1MΩ电阻有助于消除晶体振荡器件的谐波振荡,使晶体的输出信号更加纯净和稳定。
5、复位电路
当系统上电时,电容会从0V开始充电,这会导致复位引脚短暂地处于低电平状态,从而触发复位。电容充电后,复位引脚电平逐渐上升到高电平,结束复位过程,允许微控制器开始正常工作。
2.2.2 电源电路
电源电路采用LDO AMS1117-3.3将+5V直流电转+3.3V直流电。该LDO具有低纹波噪声功能,确保系统的稳定性和可靠性。电路图描述如下:
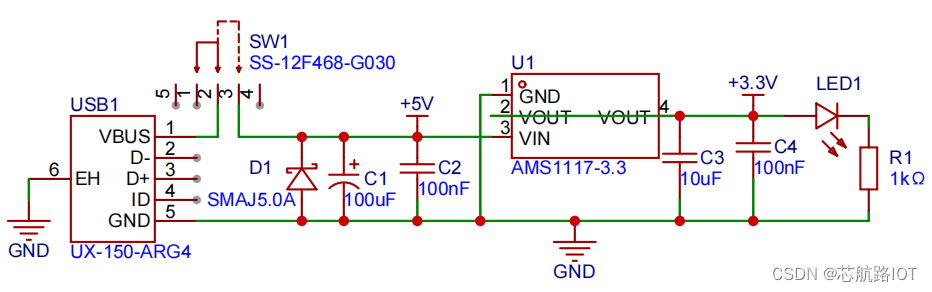
USB1 - USB +5V供电接口
SW1 - 电源开关
D1 - 通过利用该器件的非线性特性,将过电压钳制到一个较低的电压值,实现对后级电路的保护。
U1 - LDO,将+5V转为+3.3V
C1/C2/C3/C4 - 主要用于滤除由电源输出的直流电压中所含的杂波和噪声,并将其平滑处理为一个稳定的直流电压输出
R1 - 限流电阻
LED1 - 电源指示灯
2.2.3 按键电路
按键电路采用点触按键,当用户按下按键时,电路会检测到按键的接触,并产生低电平信号,从而触发相应的操作。电路图描述如下:

SW2/SW3/SW4/SW5 - 点触按键,点触按键的工作原理:按钮与触点机械作用,按下按钮,弹簧收缩,触点接触导电条,电路接通;松开按钮,弹簧恢复原状,触点离开导电条,电路断开。
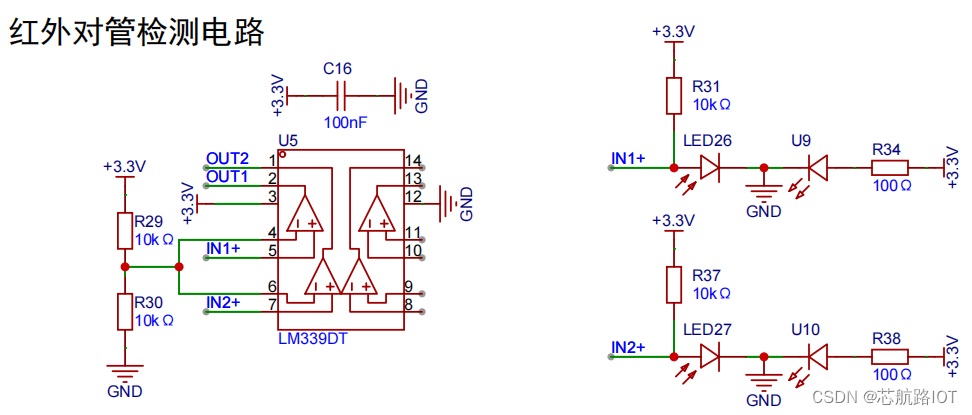
2.2.4 红外对管检测电路
红外发射二极管(LED)不断发射红外光束,红外检测二极管(PD)接收来自LED的红外光束,当LED发出的红外光束命中目标物体时,部分红外光束会被物体反射回给PD。不同的反射强度输出的电压大小不同。
LM339 是一个内部集成了四路比较器的集成电路。比较器有两个输入端和一个输出端。其中,一个输入端称为同输入端(用“+”号表示),另一个称为反相输入端(用“-”表示)。当“+”端电压高于“-”端电压时,输出正电源电压;反之,输出负电源电压。
单片机通过监测OUT1和OUT2输出的电平信号,以精确判断是否有车辆通行。在车辆经过时,红外光线被有效反射,导致OUT输出低电平状态。此外,红外检测的灵敏度可经由调整R29和R30之间的分压比例来进行精确控制。
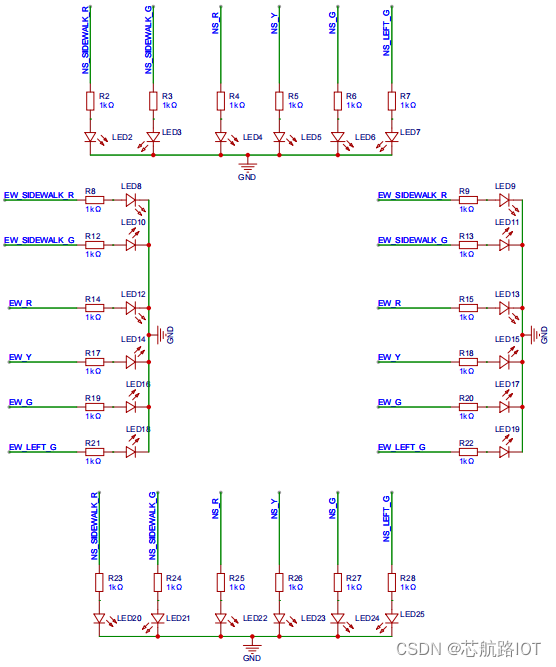
2.2.5 交通灯电路
交通灯电路采用普通的5mm发光二极管加上限流电阻组成。
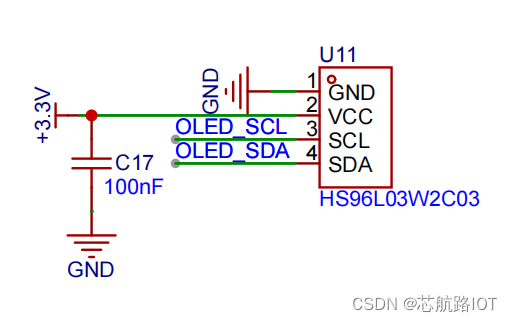
2.2.6 OLED显示电路
采用0.96寸OLED显示屏以展示交通灯车流量信息,同时,在设置交通灯时间的过程中,也运用OLED实现人机交互功能。
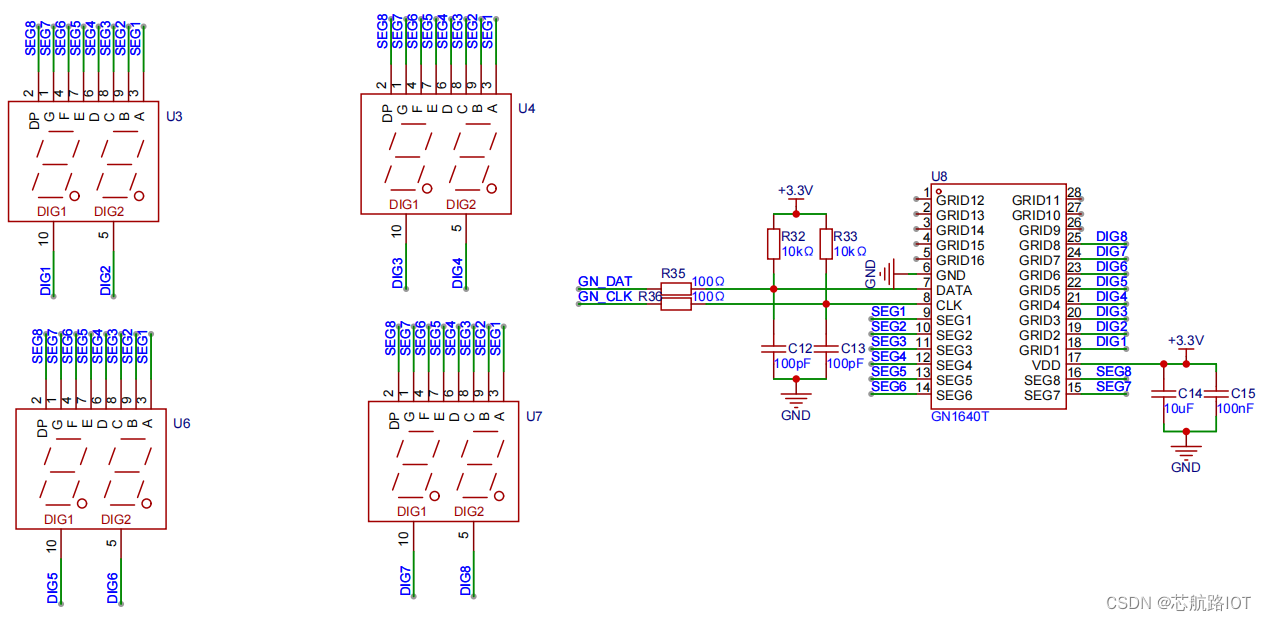
2.2.7 数码管显示电路
数码管的驱动方式采用了GN1640T驱动芯片,而东南西北四个方向则均选用了0.36英寸共阴双八红色数码管,以实现倒计时时间的精准显示。
三、软件设计
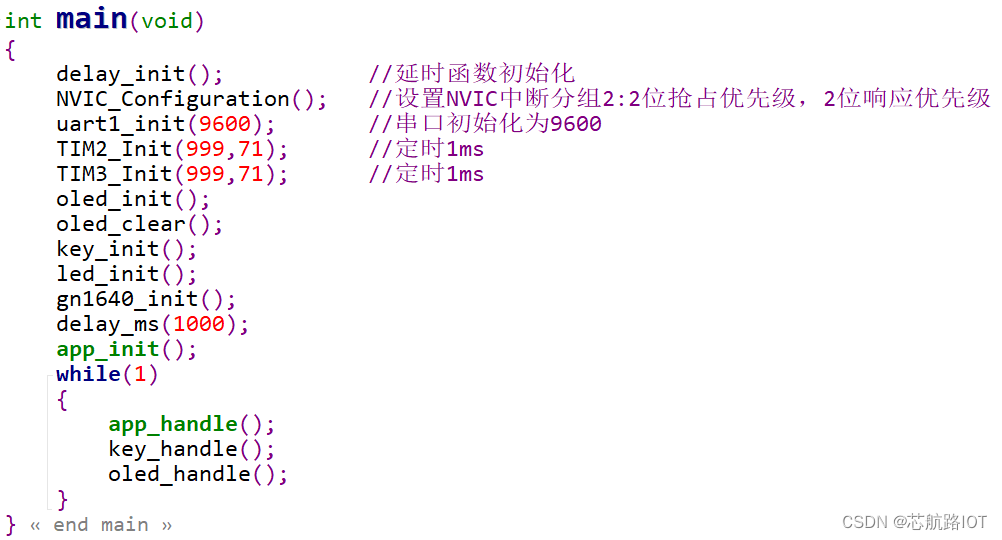
在主函数中,首先进行外设的初始化操作。随后,在while循环中,app_handle()函数负责处理交通灯和车流量的相关工作。同时,key_handle()函数则专注于处理与按键相关的操作。另外,oled_handle()函数则负责处理人机界面的交互功能。
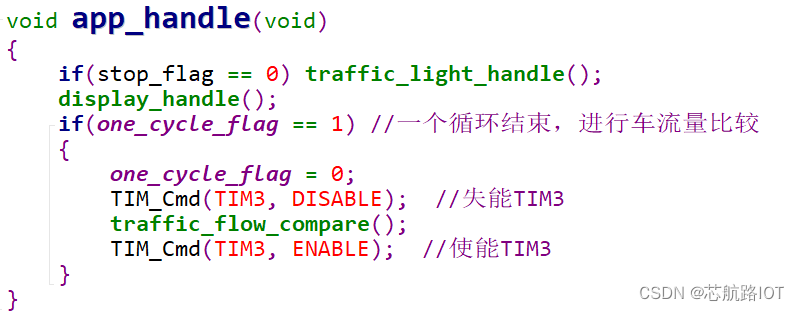
3.1 app_handle()
app_handle()函数进行交通灯信号的处理和数码管的显示,交通信号灯一个循环结束后会进行车流量的比较计算,然后重新更新东西和南北的交通灯通行时间。
traffic_light_handle()主要对交通灯的状态进行处理。
void traffic_light_handle(void)
{switch(step){case 0: //东西直行EW_STRAIGHT_RED_LED = LOW; //东西直行红灯EW_STRAIGHT_GREEN_LED = HIGH; //东西直行绿灯EW_STRAIGHT_YELLOW_LED = LOW; //东西直行黄灯EW_LEFT_GREEN_LED = LOW; //东西左转绿灯EW_SIDEWALK_GREEN_LED = LOW; //东西人行道绿灯EW_SIDEWALK_RED_LED = HIGH; //东西人行道红灯NS_STRAIGHT_RED_LED = HIGH; //南北直行红灯NS_STRAIGHT_GREEN_LED = LOW; //南北直行绿灯NS_STRAIGHT_YELLOW_LED = LOW; //南北直行黄灯NS_LEFT_GREEN_LED = LOW; //南北左转绿灯NS_SIDEWALK_GREEN_LED = HIGH; //南北人行道绿灯NS_SIDEWALK_RED_LED = LOW; //南北人行道红灯break;case 1://东西黄灯 EW_STRAIGHT_RED_LED = LOW; //东西直行红灯EW_STRAIGHT_GREEN_LED = LOW; //东西直行绿灯EW_STRAIGHT_YELLOW_LED = HIGH; //东西直行黄灯EW_LEFT_GREEN_LED = LOW; //东西左转绿灯EW_SIDEWALK_GREEN_LED = LOW; //东西人行道绿灯EW_SIDEWALK_RED_LED = HIGH; //东西人行道红灯NS_STRAIGHT_RED_LED = HIGH; //南北直行红灯NS_STRAIGHT_GREEN_LED = LOW; //南北直行绿灯NS_STRAIGHT_YELLOW_LED = LOW; //南北直行黄灯NS_LEFT_GREEN_LED = LOW; //南北左转绿灯NS_SIDEWALK_GREEN_LED = HIGH; //南北人行道绿灯NS_SIDEWALK_RED_LED = LOW; //南北人行道红灯 break;case 2://东西左转 EW_STRAIGHT_RED_LED = LOW; //东西直行红灯EW_STRAIGHT_GREEN_LED = LOW; //东西直行绿灯EW_STRAIGHT_YELLOW_LED = LOW; //东西直行黄灯EW_LEFT_GREEN_LED = HIGH; //东西左转绿灯EW_SIDEWALK_GREEN_LED = LOW; //东西人行道绿灯EW_SIDEWALK_RED_LED = HIGH; //东西人行道红灯NS_STRAIGHT_RED_LED = HIGH; //南北直行红灯NS_STRAIGHT_GREEN_LED = LOW; //南北直行绿灯NS_STRAIGHT_YELLOW_LED = LOW; //南北直行黄灯NS_LEFT_GREEN_LED = LOW; //南北左转绿灯NS_SIDEWALK_GREEN_LED = HIGH; //南北人行道绿灯NS_SIDEWALK_RED_LED = LOW; //南北人行道红灯 break;case 3://南北直行EW_STRAIGHT_RED_LED = HIGH; //东西直行红灯EW_STRAIGHT_GREEN_LED = LOW; //东西直行绿灯EW_STRAIGHT_YELLOW_LED = LOW; //东西直行黄灯EW_LEFT_GREEN_LED = LOW; //东西左转绿灯EW_SIDEWALK_GREEN_LED = HIGH; //东西人行道绿灯EW_SIDEWALK_RED_LED = LOW; //东西人行道红灯NS_STRAIGHT_RED_LED = LOW; //南北直行红灯NS_STRAIGHT_GREEN_LED = HIGH; //南北直行绿灯NS_STRAIGHT_YELLOW_LED = LOW; //南北直行黄灯NS_LEFT_GREEN_LED = LOW; //南北左转绿灯NS_SIDEWALK_GREEN_LED = LOW; //南北人行道绿灯NS_SIDEWALK_RED_LED = HIGH; //南北人行道红灯break;case 4://南北黄灯EW_STRAIGHT_RED_LED = HIGH; //东西直行红灯EW_STRAIGHT_GREEN_LED = LOW; //东西直行绿灯EW_STRAIGHT_YELLOW_LED = LOW; //东西直行黄灯EW_LEFT_GREEN_LED = LOW; //东西左转绿灯EW_SIDEWALK_GREEN_LED = HIGH; //东西人行道绿灯EW_SIDEWALK_RED_LED = LOW; //东西人行道红灯NS_STRAIGHT_RED_LED = LOW; //南北直行红灯NS_STRAIGHT_GREEN_LED = LOW; //南北直行绿灯NS_STRAIGHT_YELLOW_LED = HIGH; //南北直行黄灯NS_LEFT_GREEN_LED = LOW; //南北左转绿灯NS_SIDEWALK_GREEN_LED = LOW; //南北人行道绿灯NS_SIDEWALK_RED_LED = HIGH; //南北人行道红灯break;case 5://南北左转EW_STRAIGHT_RED_LED = HIGH; //东西直行红灯EW_STRAIGHT_GREEN_LED = LOW; //东西直行绿灯EW_STRAIGHT_YELLOW_LED = LOW; //东西直行黄灯EW_LEFT_GREEN_LED = LOW; //东西左转绿灯EW_SIDEWALK_GREEN_LED = HIGH; //东西人行道绿灯EW_SIDEWALK_RED_LED = LOW; //东西人行道红灯NS_STRAIGHT_RED_LED = LOW; //南北直行红灯NS_STRAIGHT_GREEN_LED = LOW; //南北直行绿灯NS_STRAIGHT_YELLOW_LED = LOW; //南北直行黄灯NS_LEFT_GREEN_LED = HIGH; //南北左转绿灯NS_SIDEWALK_GREEN_LED = LOW; //南北人行道绿灯NS_SIDEWALK_RED_LED = HIGH; //南北人行道红灯break;default: break;}
}3.2 key_handle()
key_handle() 主要对交通灯通行时间进行调整。
void key_handle(void)
{if(flag_get(&key_flag,KEY4_PRESS_FLAG)){flag_clr(&key_flag,KEY4_PRESS_FLAG);set_num++;if(set_num > 2) set_num = 1;TIM_Cmd(TIM3, DISABLE); //失能TIM3if(set_num == 1){inverse_oled_show_string(0,0,"SET EW:",8);oled_show_num(80,0,ew_time,2,8);}else{oled_show_string(0,0,"SET EW:",8);oled_show_num(80,0,ew_time,2,8);}if(set_num == 2){inverse_oled_show_string(1,2,"SET NS:",8);oled_show_num(80,2,ns_time,2,8);}else{oled_show_string(1,2,"SET NS:",8);oled_show_num(80,2,ns_time,2,8);} } else if(flag_get(&key_flag,KEY5_PRESS_FLAG)){flag_clr(&key_flag,KEY5_PRESS_FLAG);if(set_num == 1) {if(ew_time < MAX_TIME) ew_time++;}else if(set_num == 2) {if(ns_time < MAX_TIME) ns_time++;}oled_show_num(80,0,ew_time,2,8);oled_show_num(80,2,ns_time,2,8);} else if(flag_get(&key_flag,KEY3_PRESS_FLAG)){flag_clr(&key_flag,KEY3_PRESS_FLAG);if(set_num == 1) {if(ew_time > MIN_TIME) ew_time--;}else if(set_num == 2) {if(ns_time > MIN_TIME) ns_time--;}oled_show_num(80,0,ew_time,2,8);oled_show_num(80,2,ns_time,2,8);} else if(flag_get(&key_flag,KEY2_PRESS_FLAG)){flag_clr(&key_flag,KEY2_PRESS_FLAG);set_num = 0;step = 0;current_ew_time = ew_time;current_ns_time = ew_time + STRAIGHT_YELLOW_TIME_NUM + LEFT_GREEN_TIME_NUM;;oled_clear();TIM_Cmd(TIM3, ENABLE); //使能TIM3} if(flag_get(&key_flag,KEY1_PRESS_FLAG)){flag_clr(&key_flag,KEY1_PRESS_FLAG);if(stop_flag){stop_flag = 0;TIM_Cmd(TIM3, ENABLE); //失能TIM3}else{stop_flag = 1;EW_STRAIGHT_RED_LED = HIGH; //东西直行红灯EW_STRAIGHT_GREEN_LED = LOW; //东西直行绿灯EW_STRAIGHT_YELLOW_LED = LOW; //东西直行黄灯EW_LEFT_GREEN_LED = LOW; //东西左转绿灯EW_SIDEWALK_GREEN_LED = LOW; //东西人行道绿灯EW_SIDEWALK_RED_LED = HIGH; //东西人行道红灯NS_STRAIGHT_RED_LED = HIGH; //南北直行红灯NS_STRAIGHT_GREEN_LED = LOW; //南北直行绿灯NS_STRAIGHT_YELLOW_LED = LOW; //南北直行黄灯NS_LEFT_GREEN_LED = LOW; //南北左转绿灯NS_SIDEWALK_GREEN_LED = LOW; //南北人行道绿灯NS_SIDEWALK_RED_LED = HIGH; //南北人行道红灯TIM_Cmd(TIM3, DISABLE); //失能TIM3}}
}3.3 oled_handle()
OLED主要显示车流量信息和设置交通灯通行时间时进行人机信息交互。
四、实物演示
交通灯通行时间演示
交通灯通行时间演示
车流量检测演示
车流量检测演示
倒计时时间设置演示
倒计时时间设置演示
五、技术交流
如果您有更好的建议或者在阅读过程中遇到任何问题或疑虑,欢迎加我QQ ,一起探讨技术问题,我的QQ号是986571840,加的时候请注明CSDN。
感谢各位用户点赞、分享、在看,这些行为让知识得以更加广泛地传播,从而让更多人受益。
请在转载作品时注明出处,严禁抄袭行为。
这篇关于STM32多功能交通灯系统:从原理到实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





